
点击关注

已关注公众号


当具身智能从实验室走向真实场景,全行业都在面对同一个灵魂拷问:为什么机器人能对话、能演示,却依然干不好复杂的活?
答案藏在两个最朴素的词里:眼里没活儿、手上没数。
2026年5月8日,北京人形机器人创新中心发布慧思开物Agent,以一场无仿真、无预演的真机直播,给出了可量产、可复用、可规模化的标准答案。
这款比海外同类框架早一年启动、历经14个月迭代的触物交互智能体,不是又一次技术炫技,而是一次从被动执行到主动干活、从短视简单到长程复杂的产业级跃迁,正在把 “能干活的机器人” 从概念变成现实。
全局动态记忆:机器人如何根治“健忘症”?
过去的机器人,本质上都是 “金鱼脑”。
视野里有什么,就只能处理什么;物体一离开镜头、被遮挡、换个角度,就等于彻底 “消失”。长链路任务、多步骤操作、动态环境,对它们来说几乎是不可能完成的挑战 —— 这不是算力不够,而是空间认知与记忆机制的底层缺失。
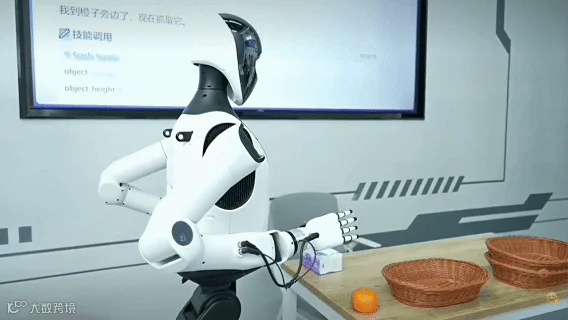
慧思开物Agent的第一个硬核突破,就是行业首个全局场景感知与动态空间记忆系统,直接把机器人的 “短时记忆” 升级为 “长期空间常识”。
它不是简单存储图像,而是构建一套动态语义地图:把物体类别、颜色、材质、位置、相对关系全部结构化记录,并实时增量更新;哪怕物品离开视野、被遮挡、视角切换,依然能精准定位与推理。测试数据更具说服力:复杂长程任务中,空间记忆链路准确率稳定100%,视角切换、物体遮挡等真实扰动下,任务完成率仍超98%。

这意味着机器人真正拥有了空间常识:
-
● 知道杯子在桌子左侧、抽屉在柜子下方; -
● 记得刚才拿过的工具放在哪里; -
● 能推理 “被挡住的物品大概率在什么位置”; -
● 越用越懂环境,形成持续进化的空间认知。 -
从 “看见眼前” 到 “理解全局”,这一步解决的是具身智能走向家庭、物流、工业的核心前提 —— 没有稳定可靠的长时空间记忆,再强的大模型也只能做桌面级短平快操作,无法支撑真实世界的复杂作业。
千人千面:机器人怎样从“工具”变成“伙伴”?
机器人记不住人、分不清偏好、每次交互都像“第一次见面”,是行业另一大痛点。
慧思开物Agent用FaceID用户记忆 + 长期个性化建模,让机器人实现了从“执行指令”到“主动服务”的跨越。见过一次就能长期记住身份,沉淀行为偏好与用户画像,支持跨任务上下文延续,再结合事件驱动,真正做到 “眼里有活儿”。
举个最生活化的例子:你随口说口渴,机器人通过人脸匹配,调取历史记忆知道你偏爱可乐,不用二次指令,主动去取来可乐 —— 这不是预设脚本,而是感知 - 记忆 - 推理 - 执行的全自主闭环。

对产业而言,这项能力的价值远超“贴心”:
-
● 家庭场景:记住老人用药时间、儿童看护习惯,提供持续稳定的个性化服务; -
● 商业场景:区分VIP客户、记住服务偏好,提升接待与服务效率; -
● 工业场景:绑定操作员习惯、延续任务上下文,减少重复配置与干预。 -
当机器人能“记住你、理解你、主动帮你”,它就不再是冰冷的执行器,而是可长期协同的智能伙伴 —— 这是具身智能从“能用”到“好用”的关键分水岭。
多模态力控:机器人如何做到“手上有数”?
“能抓起来但抓不好,能接触但控不住”,是物理交互的行业死结。
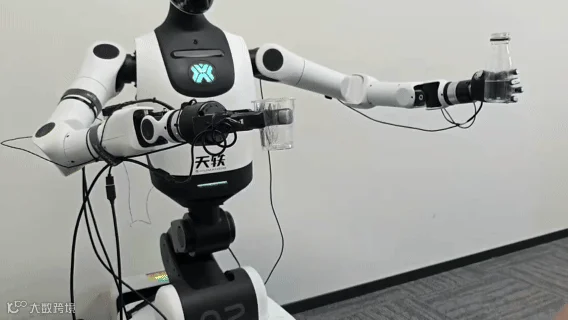
慧思开物Agent选择真机优先、场景闭环的硬核路线,用视觉 + 触觉多模态感知 + 动态力控,把“手上有数”落到实处。它会根据物品材质、重量、形状自适应调节抓取力度与姿态,具备跨物体泛化、失败监测与自动重试能力,确保物理交互安全、精准、稳定。
直播中递水、取纸巾等全流程,均为真机实时运行,无后期剪辑、无预演脚本,直接完成从实验室到现实世界的跨越。这种“不玩仿真、只做真机”的态度,背后是对工程化落地的极致追求 —— 具身智能的价值,最终必须在物理世界里兑现。
对开发者与厂商来说,这意味着:
-
● 不用再为 “抓不稳、控不住” 反复调参; -
● 一套力控逻辑可适配不同材质与形态物品; -
● 真机验证闭环,大幅缩短场景落地周期。
一次开发多机部署:如何打破规模化落地壁垒?
具身智能想走进千行百业,最大障碍不是技术炫技,而是开发难、适配慢、复用低。
慧思开物Agent用配置驱动 + 模块化架构,打造了对开发者极度友好的开放生态,实现 “一次开发,多机部署”,把成本与门槛压到最低。
软件层面,它像一个“万用架构”,可轻松接入XR-1、Pelican、天工系列等多款前沿模型,轻量配置化即可快速切换模型、工具与任务Prompt,低代码上手;技能描述体积相比传统提示词压缩80%以上,指令缓存命中后单次响应耗时降低50%,长链路任务整体开销下降20%,彻底避免 “越长越慢、越长越乱”。
硬件层面,它具备超强跨本体适配性,一套技能可适配多种机器人形态,开发者不用重复造轮子,专注创新即可。开源社区数据显示,安装部署、功能技能相关话题占比近40%,多数问题5分钟内就能得到回应,生态活跃度与支持效率领跑行业。
这种开放能力,直接改写了行业传统模式:从“一台机器人一套定制方案”,转向“一脑多机、一脑多能”的通用平台;从高成本小众试点,转向低成本规模化复制。
写在最后:具身智能的下一个战场,是“真落地”
全球具身智能正经历关键跃迁:从能对话、能演示,转向能干活、能落地。AI Agent也从数字世界走向物理世界,成为机器人的核心 “大脑”。
慧思开物Agent的价值,不在于堆参数、拼概念,而在于用空间记忆、千人千面、多模态力控、开放生态四大硬核突破,搭建起可直接落地的智能底座,让人形机器人真正具备在家庭、商业、工业场景稳定作业的能力。

它证明了一件事:具身智能的终极竞争力,不是实验室里的极限性能,而是真实场景里的可靠、好用、低成本。
北京人形以 “长期技术主义” 深耕底层,从世界模型、VLA/VLM开源,到本次Agent发布,始终聚焦 “经得起时间与场景检验” 的技术。未来,随着空间认知、拟人交互、多机协同、生态开放持续升级,慧思开物有望成为具身智能规模化的标准底座,推动人形机器人真正走进千家万户、千行百业。
当机器人眼里有活儿、手上有数,具身智能的规模化时代,才真正拉开大幕。
往期推荐

融资10亿!上海国资重仓AMD前员工
吴夏青是谁?为什么离职英伟达创业?
点赞鼓励一下
图片来源:网络
本文不作为投资建议