
点击关注

已关注公众号


最近,一款名叫Open Duck Mini的开源机器人在AI与机器人社区快速扩散。它不是大厂消费级产品,也不是概念样机,而是一个完全开放、可亲手搭建的双足机器人项目。它的出现,恰好踩中了当下最关键的技术趋势:小模型本地运行、开源硬件模块化、具身智能从仿真走向实体。
这不是一个简单的手工项目,而是开源文化、边缘AI、仿真迁移三者交汇的标志性信号。当AI不再只存在于对话框,当机器人身体可以被开源、打印、组装,整个产业的入门逻辑、研发路径、创新方式,都在被悄悄改写。

Open Duck Mini到底是什么?为何能引爆社区?
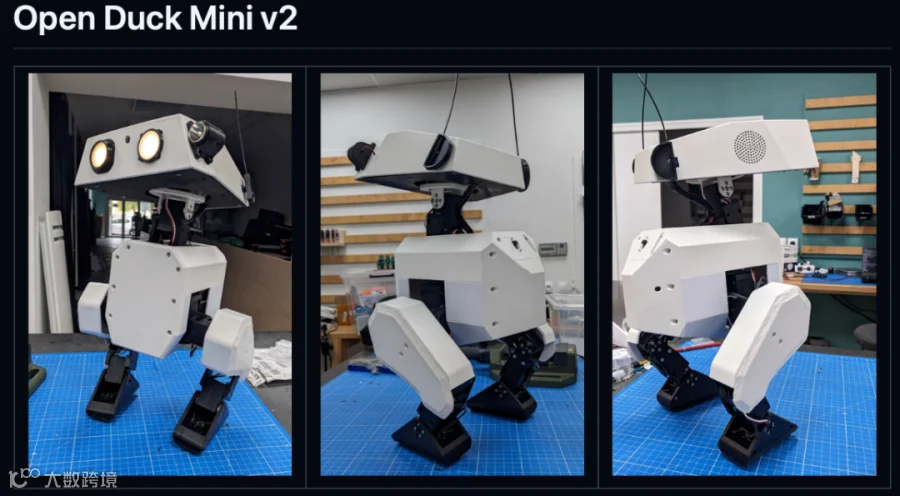
Open Duck Mini是GitHub用户apirrone发起的开源项目,定位非常清晰:做一个迷你版Disney BDX Droid。它腿伸展开时高度约42厘米,完整物料清单的目标成本低于400美元,采用Apache-2.0开源协议。截至2026年5月22日,该GitHub仓库star数接近3000,fork数超过360。
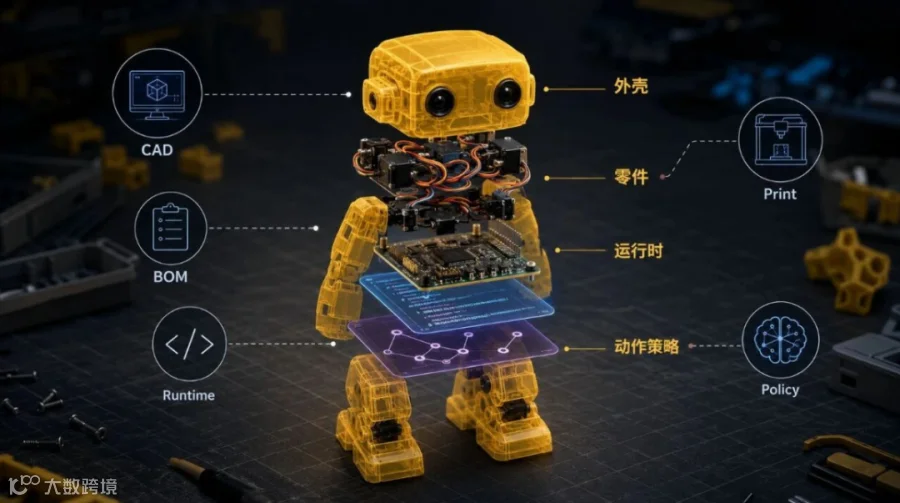
它最特别的地方,是把“造一台会走路的双足机器人”的全套资料全部公开。打开仓库,你看到的不是一键运行的程序,而是一套完整的工程资料中枢:CAD文件、3D 打印资料、零件清单、组装文档、运行时代码、动作训练策略,全部开放可查、可修改、可复用。
这和市面上绝大多数机器人产品完全不同。普通机器人玩具是封闭体系:买回来、连App、按流程使用,用户无法改动底层逻辑,也看不到内部实现。而Open Duck Mini把一切敞开:外壳自己3D打印,零件自己采购,组装自己动手,代码自己部署,策略自己训练或替换。
它不是成品,而是一套“建造说明书”。你不是购买一个机器人,而是从零件、结构、代码、算法里,把它一步步搭建出来。这也是它在技术社区迅速传播的核心原因:它把曾经高不可攀的双足机器人,变成了可触及、可改造、可学习的开放项目。
但必须明确:项目README中明确说明,这仍是一个working repo,存在不少未文档化的脚本。这意味着它有吸引力,也有明确门槛,并非面向普通用户的消费品。
它靠什么走路?不是遥控,是sim2real仿真迁移
很多人好奇,Open Duck Mini是怎么动起来的?答案不是遥控器,也不是预设动作序列,而是当下具身智能的主流技术路线:sim2real(仿真到现实)。
项目的核心思路,是先在仿真环境里训练机器人的行走策略,再把训练好的策略迁移到真实硬件上运行。仓库中提供了已经训练好的walking policy,可以通过ONNX 模型直接加载运行。同时,项目提到正在切换到Mujoco Playground进行仿真训练。
运行时仓库则负责把这套策略落地到硬件,其中包含Raspberry Pi Zero 2W的配置说明、IMU测试、电机控制板配置、电机测试等完整工程步骤。

这一点非常关键:它不是靠手动遥控摆姿势,而是用 AI 在虚拟世界里学会走路,再把能力迁移到现实身体里。这种方式大幅降低了实体机器人的研发成本与调试难度,也是目前小型双足机器人最可行的技术路径之一。
但同样需要客观说明:现阶段它并非能稳定自主完成复杂任务。更准确的定位是,它在验证一件事:把仿真训练出的步态策略,部署到个人可打印、可组装的低成本机器人硬件上。仅这一点,在开源硬件领域已经具备标志性意义。
和Gemma 4到底是什么关系?别被误导
在大量转发中,Open Duck Mini常和Google的Gemma 4模型放在一起,被描述为“能看、能听、能对话的AI机器人”。这里需要把事实厘清,避免误解。
-
● Open Duck Mini项目本身的核心,是开源机器人硬件、结构、动作、运行时与训练资料,仓库本身并没有完整集成Gemma 4的视觉与对话能力。 -
-
● Gemma 4是Google在2026年4月发布的开放模型家族,官方信息显示它支持多模态、视觉、音频、函数调用与agent流程,其中E2B、E4B等边缘版本可在Raspberry Pi、手机、NVIDIA Jetson Orin Nano等设备上离线运行。 -
两者被放在一起讨论的真正价值,是趋势层面的结合:当边缘端模型足够小、足够强,可以离线完成感知与理解,机器人就不再只是执行固定动作,而具备本地决策的可能。但这是趋势判断,不是Open Duck Mini当前已实现的功能。第三方演示可作为趋势参考,项目本身的功能边界,必须以GitHub README的真实内容为准。
简单说:Gemma 4提供了“大脑”的可能,Open Duck Mini提供了“身体”的基础,但两者在项目内尚未完成官方集成。
谁适合玩?谁绝对不适合?真相很现实
Open Duck Mini虽然可爱、技术前沿,但它不是面向大众的陪伴机器人,也不适合零基础用户。
它的组装与部署涉及大量工程操作:3D打印、舵机安装、IMU接线、电机控制板配置、树莓派系统设置、I2C通信、SSH调试、Python环境配置、电机测试、偏移量校准等。这不是一个周末就能轻松完成的手工,需要硬件调试与基础编程能力。
同时,项目仍有部分功能未完成,包括LED 眼睛、摄像头、扬声器、麦克风等相关expression features。运行时文档中也存在大量工程化提示,进一步说明它的非消费属性。
它的目标人群非常明确:
-
● 机器人与开源硬件爱好者 -
● 具备 3D 打印与电子装配经验的制作者 -
● 研究强化学习、sim2real、本地AI硬件落地的开发者 -
而以下人群完全不适合:
-
● 只想买一台开箱即用的陪伴机器人的用户 -
● 不愿意调试硬件、不具备工程基础的用户 -
● 期待拆盒开机就能对话、娱乐的普通消费者
一个普通人未必会造的项目,为何值得全行业关注?
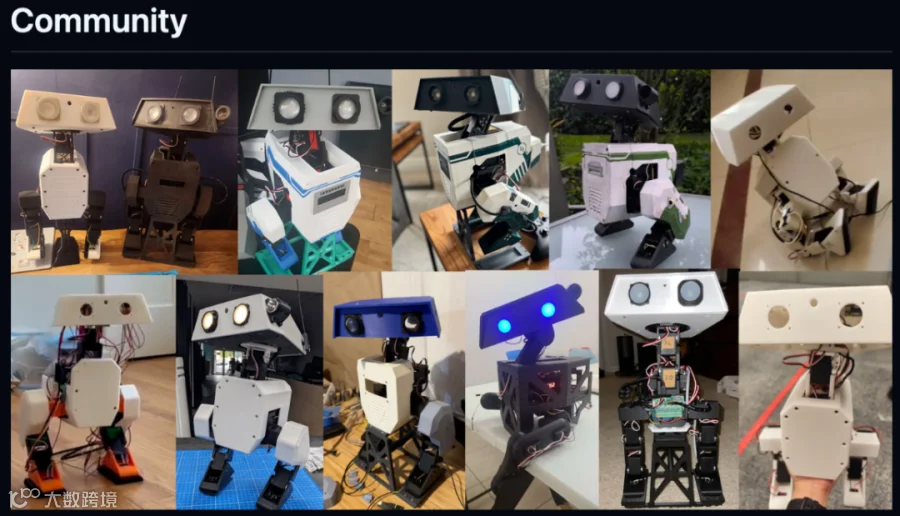
大多数人并不会真的去3D打印、采购零件、调试一台Open Duck Mini,但这并不妨碍它成为一个必须被关注的产业信号。因为它代表的趋势,比项目本身更重要。
第一,AI正在走出屏幕。过去AI只存在于浏览器、App、云端服务器,现在轻量化模型可以跑在边缘设备上,开源硬件让可移动的身体变得可复制。具身智能的落地路径,正在变得更清晰、更低成本。
第二,机器人的入门逻辑被改变。过去机器人从高价整机开始普及,现在它可以从开源文件、BOM清单、3D打印件开始,先进入创客社区、学校实验室、小型研发团队,再逐步走向更广泛的场景。
第三,技术民主化正在发生。就像Linux虽然不是人人都会编译,但改变了整个服务器与设备生态;开源模型不是人人都会训练,但改变了本地AI的格局。开源机器人也是如此:它不要求每个人都成为机械工程师,而是把机器人的原理、结构、训练、部署方式,从封闭的企业实验室里释放出来,放到更多人的工作台之上。
Open Duck Mini目前依然粗糙、需要折腾、不适合大众直接复刻,但它提供了一个极其真实的未来图景:AI走向物理世界的第一步,未必是昂贵、封闭、厂商完全定义好的家用机器人,而更可能是一套开源文件、一组通用零件、一个可打印的身体,以及一群愿意动手创造的人。
AI走出对话框,第一站不是商场,是实验室与工作台
Open Duck Mini不是完美的产品,它有未完善的文档、未实现的功能、不低的使用门槛,但它是一个诚实、透明、有指向性的项目。
它告诉我们:AI与机器人的未来,不只属于大厂实验室,也属于每一个愿意学习、动手、创造的人。当机器人的全套资料可以开源、成本可以压到400美元以内、步态可以通过仿真训练获得,整个行业的创新速度,将会被彻底改变。
未来已来,它不是以昂贵商品的形式出现,而是以开源文件的形式,来到我们面前。
往期推荐

融资10亿!上海国资重仓AMD前员工
吴夏青是谁?为什么离职英伟达创业?
点赞鼓励一下
图片来源:网络
本文不作为投资建议