2026年2月10日,北京人形机器人创新中心发布了具身天工3.0。这次更新的核心很明确:更开放,更好用。
对于关注机器人领域的人而言,这或许不只是一个产品迭代。它更像是一次对行业现状的回应——当前人形机器人的开发应用,面临硬件接口封闭与软件协议不兼容两大障碍。许多研发重复进行,场景落地缓慢。
具身天工3.0试图改变这一点。

01 开放,是首要的改变
它从物理接口开始。机器人本体预留了多类型拓展接口,允许各类外设工具接入。这意味着,无论是特种作业、工业制造还是商用服务,机器人都能通过快速适配,与现有系统衔接。
软件层面是更关键的一步。基于自研的“慧思开物”平台,它提供了完整的开发文档、工具链和低代码开发平台。它兼容ROS2、MQTT、TCP/IP等主流通信协议。开发者无需重构底层,即可进行二次开发。
北京人形已经将包括具身天工本体、运控框架、世界模型、具身VLM大模型、跨本体VLA大模型,以及训练工具链、数据集RoboMIND、仿真资产ArtVIP等一系列关键技术成果开源。
这种开放不是姿态,而是路径。它意在降低各行各业的开发成本与门槛,让技术迭代从少数机构的实验室,扩散到更广泛的生态中。
02 好用,建立在性能与智能之上
开放性降低了使用门槛,但“好用”的本质,仍需回归到机器人能做什么。
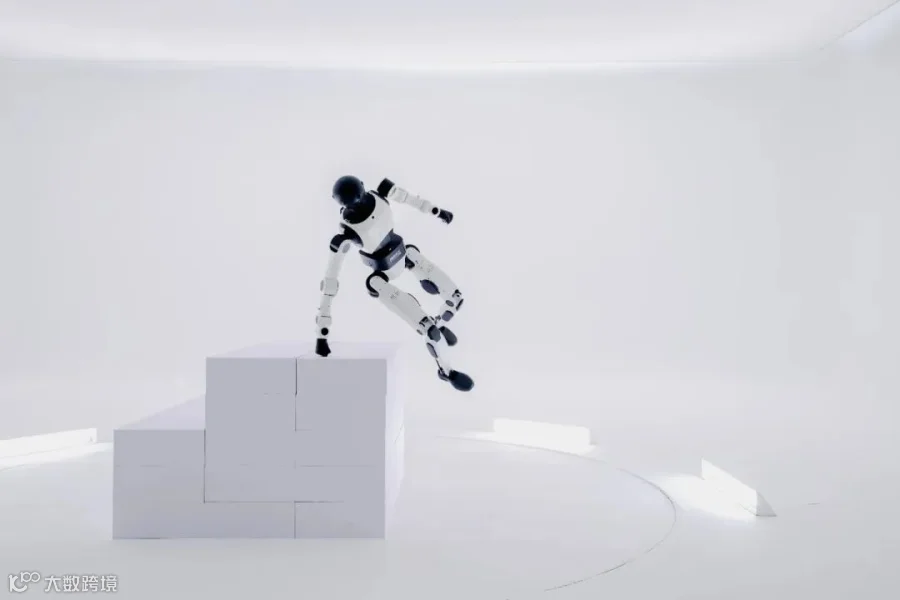
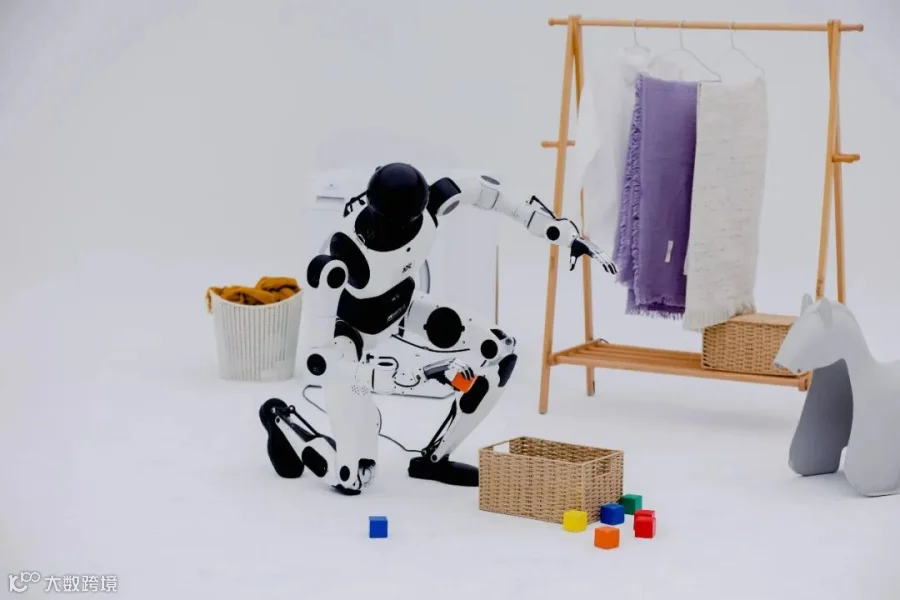
在物理性能上,具身天工3.0配备了高扭矩一体化关节,以应对高负载需求。它能在崎岖地面保持稳定,并能翻越约1米高的障碍物。其多自由度结构与全身协同控制,使其能完成跪地作业、弯腰转身等灵巧操作,并将操作精度控制在毫米级。

这些参数背后,指向的是它在复杂环境下的实际作业能力。
让这些物理能力被有效调度的,是“慧思开物”通用具身智能平台。它构建了“感知-决策-执行”的闭环。
其中,“大脑”部分由世界模型、VLM大模型驱动,负责理解场景、解析指令、进行任务规划。“小脑”部分则由VLA模型、全自主导航等能力驱动,负责实时感知避障与精准动作执行。

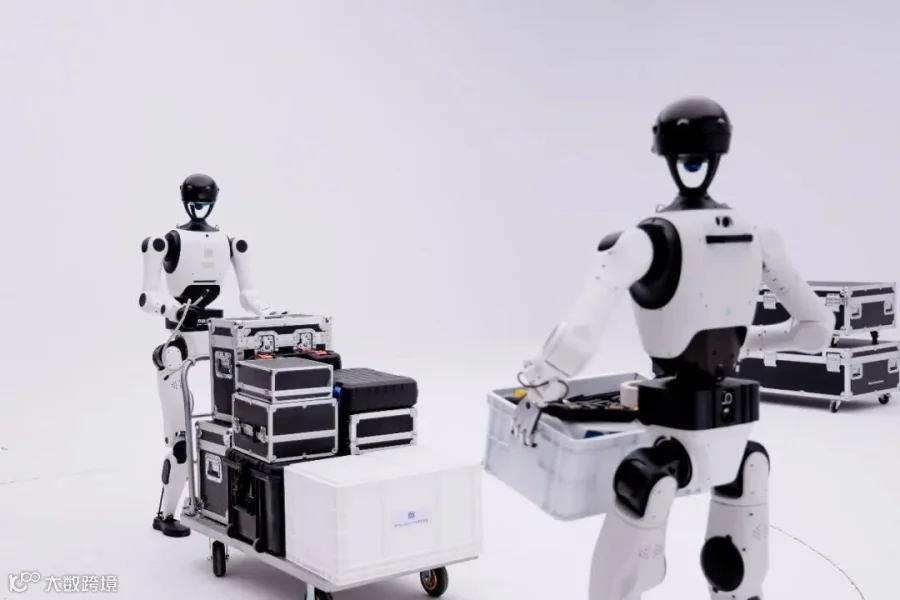
最终,平台能实现多智能体协作,支持“一脑多机、一脑多能”的作业模式。机器人得以逐步摆脱遥控,实现自主协同作业。
03 观点:关键不是机器人,而是平台
具身天工3.0的发布,其意义或许不在于展示某个单项技术的突破,而在于它尝试提供一套“通用解决方案”。
它触及了一个核心矛盾:人形机器人拥有广阔的应用前景,但其研发的高昂成本与场景的碎片化特征,一直制约着其规模化落地。通过提供开放的硬件接口和兼容的软件生态,具身天工3.0实质上是将自身定位为一个“基础平台”。
它将复杂的底层技术封装起来,允许下游的科研机构、企业和开发者,在最上层——即具体的应用场景——进行创新。这类似于智能手机的操作系统,厂商搭建好基础框架,开发者则创造出海量应用。
因此,衡量它成功的标准,将不仅是其本体能完成多么复杂的动作,更在于未来有多少不同的行业,能基于这个平台,开发出解决自身实际问题的机器人应用。
当机器人技术走向开放平台,其发展逻辑可能从“技术驱动单个产品”,转向“生态驱动整体产业”。具身天工3.0迈出的这一步,正是试图开启后一种可能。它的真正考验,将在于能否吸引足够多的参与者,共同构建那个“千行百业”的图景。