

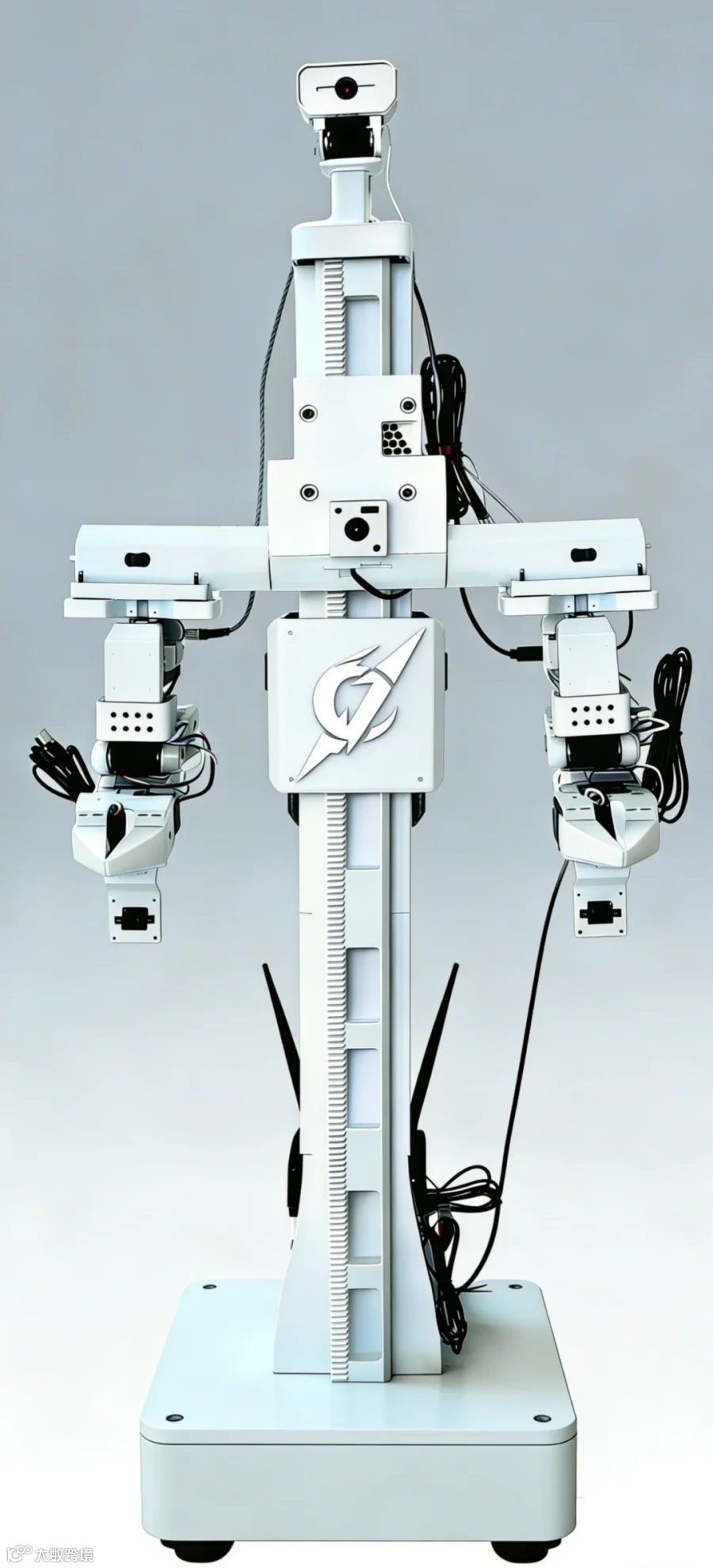
在具身智能赛道竞争白热化的当下,扩世科技推出全新人形机器人Model机,以开源双臂大模型和多模态感知系统为核心,试图打破行业技术壁垒,为通用人形机器人落地提供新路径。
01 五相机感知系统 从“看”跨越到“理解”
Model机搭载5个相机组成的视觉感知阵列,配合“脑补空间视觉感知”技术,实现了对三维环境的实时重建与动态理解。区别于传统单目/双目相机的局限,多相机布局让机器人能够同时捕捉场景细节、深度信息和运动轨迹,在复杂环境中精准识别障碍物、定位目标物体。
这一配置并非简单的硬件堆叠,而是为了支撑后续的空间推理与任务规划。在导航场景中,Model机可通过仿真虚拟现实雷达避让技术,提前预判动态障碍,结合视觉数据完成高精度路径规划,在无GPS、无预建地图的环境中实现自主移动。
02 双臂大模型开源 降低具身智能门槛
本次发布的核心亮点,是Model机搭载的EVTVLA双臂大模型全面开源。这意味着开发者可以直接获取机器人的双臂控制逻辑、视觉-动作映射算法,以及底层运动规划代码。
不同于闭源方案的封闭生态,开源模式将加速具身智能应用的迭代速度。开发者无需从零搭建硬件-软件协同框架,可基于EVTVLA快速适配工业装配、家庭服务、科研实验等场景。
同时,扩世科技提供配套云平台训练支持,允许用户上传自定义数据集,针对特定任务微调模型,进一步降低了技术落地的成本。
03 场景化案例先行 走向真实世界
为了验证技术可行性,Model机配备了5个预设应用案例,覆盖工业协作、日常交互、科研探索等典型场景。
这些案例并非演示性Demo,而是经过实际环境测试的可复用方案,包括精密零件装配、桌面物品整理、动态目标跟随等,直观展示了机器人在非结构化环境中的操作能力。
云平台训练的加入,让案例迭代变得更高效。用户可通过云端算力对现有案例进行优化,或开发全新任务流程,形成“硬件-模型-场景”的闭环生态。这种模式既满足了科研机构的实验需求,也为企业级客户提供了快速定制化的可能。
04 开源能否成为人形机器人破局关键?
当前人形机器人行业仍面临“感知精度不足、控制逻辑复杂、开发成本高昂”三大痛点。扩世科技Model机的发布,本质是通过硬件开放+模型开源的组合拳,试图重构行业协作模式。
一方面,5相机感知系统和空间视觉技术,提升了机器人对真实世界的理解能力,为通用智能打下基础;
另一方面,EVTVLA大模型的开源,打破了头部企业的技术垄断,让中小团队和科研机构能够参与到具身智能的创新中。
但挑战依然存在,开源模型的稳定性、硬件成本的控制、场景落地的适配性,仍需时间验证。不过,随着云平台训练能力的开放,Model机有望成为具身智能领域的“开发基准平台”,推动人形机器人从概念走向实用。
05 具身智能下一个十年,从开源开始
扩世科技Model机的发布,不仅是一款新品的亮相,更是具身智能发展路径的一次重要探索。在通用人工智能与实体世界交互的浪潮中,开源或许是加速技术迭代、降低落地门槛的最优解。
随着更多开发者加入生态,人形机器人有望在未来3-5年内,从实验室走进工厂、家庭和公共空间,真正成为人类的智能协作伙伴。
免责声明:本文通过参考公众媒体内容,整理、翻译、编辑而成,仅供读者参考。文中的观点和内容不具有任何指导作用,对读者不构成任何项目建议或承诺!如果本文不慎侵犯您的权益,请与我们联系,我们将及时处理。