
山东青岛崂山区的人形机器人数据采集训练场内,数据采集员操控机器人重复完成物流分拣、商超理货等任务,通过千百次试错积累海量动作数据,助力机器人适配真实场景。与此同时,优必选Walker S1在极氪工厂“实习”进阶,上海浦东具身数据采集厂日均采集数据超3万条,深圳诺因智能则通过虚拟数据“喂养”机器人适配家庭场景。

当人形机器人从实验室走向各类实际场景,一个核心问题随之而来:这些“钢铁新人”,真的需要像人类一样“先培训,再上岗”吗?答案,藏在行业实践与技术现状的细节中。
01 岗前培训的核心,是解决机器人“能动”与“会干”的差距吗?
当前全球人形机器人产业仍处于早期阶段,多数产品能完成跑跳、举物等基础动作,却难以应对真实场景的复杂需求——这正是岗前培训的核心意义所在,其核心目标并非让机器人“能动”,而是让机器人“会干”。

青岛的训练场给出了直观答案:这里复刻了工业、家庭、商业等真实场景,机器人在人类操控下反复试错,本质是完成“职业启蒙”。如同人类新人入职需熟悉流程,机器人的“培训”,核心是通过海量动作数据积累,让其“大脑”掌握不同场景的操作逻辑,打通智能化落地的“最后一公里”。
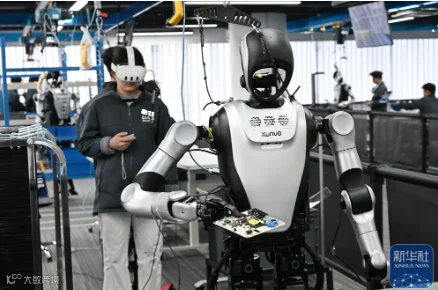
优必选的工厂实训更具说服力。2024年7月,Walker S Lite在极氪工厂搬运物料时,动作缓慢且依赖二维码定位,效率仅为人工的20%;经过3个月针对性培训,升级后的Walker S1动作速度提升25%,还能完成车标毫米级检测等复杂任务。行业共识是,人形机器人硬件提升速度已快于软件与数据适配速度,“大脑没经验”才是核心瓶颈,而岗前培训正是填补这一差距的关键。
02 人形机器人跳过培训直接上岗,可行吗?
有人疑问,搭载先进具身大模型的人形机器人,能否跳过培训直接上岗?从行业实践来看,这种尝试的代价远超预期,甚至会阻碍产业落地。
最直接的问题是效率低下与安全隐患。未培训的机器人无法应对突发情况:工业车间可能因识别失误导致装配出错,家庭场景可能因力度控制不当损坏物品,商业场景可能因无法处理复杂指令陷入停滞。上海智元灵犀X2能精准完成端茶、烤面包等任务,背后是其在4000平方米采集厂经过上百个细分场景的系统培训,并非“天生就会”。

更深层的代价是研发成本浪费与产业信任损耗。人形机器人研发投入巨大,未培训就投入使用,不仅无法发挥价值,还可能因频繁出错让企业失去信心。诺因智能的实践也印证了这一点,其聚焦家用场景,先让机器人在虚拟环境“预培训”,再进入真实场景优化,最终模型在权威榜单中夺冠,凸显了培训的重要性。
03 岗前培训是唯一路径吗?效率与成本如何平衡?
认可岗前培训的必要性,不代表要陷入“唯培训论”。行业内的争议,主要集中在培训方式与成本上——传统实景培训成本高、周期长,是否有更高效的替代方案?

虚拟仿真培训被认为是降本方向,无需搭建真实环境,可快速生成多样化数据,适合机器人预训练。但业内人士坦言,虚拟数据仅能解决“基础认知”,要实现落地,必须结合真实场景后训练,否则无法应对动态光照、温度变化等现实干扰。

“小样本快速泛化”与“群体协同培训”是另一重要探索。上海智元机器人凭借相关算法,少量示范就能掌握新任务;优必选通过“大小脑”协同技术,让一台机器人的技能复制给所有机器人,大幅提升培训效率。此外,也有人认为,随着具身大模型迭代,机器人自主学习能力会提升,但目前来看,这仍需时间,即便诺因智能的模型表现出色,也离不开海量数据“喂养”,而数据积累本质仍是“隐性培训”。
04 现阶段,人形机器人“先培训,再上岗”是必然选择吗?
回到核心问题,结合行业实践与技术现状,答案十分明确:当前技术条件下,岗前培训不是可选项,而是人形机器人从实验室走向规模化应用的必经之路。

这种培训已超越“重复动作”,成为打通技术瓶颈、适配真实场景的核心环节。青岛训练场、上海创新中心、深圳实验室,本质上都是机器人的“职业学校”,依托中国完整的制造业体系和丰富场景资源,我们能快速积累高质量训练数据,推动机器人能力迭代。
当然,岗前培训模式也在不断进化,从实景采集到虚实结合,再到小样本泛化与群体协同,行业正探索更高效经济的方式。未来,随着技术成熟,培训周期会缩短、成本会降低,但“先掌握技能,再投入使用”的核心逻辑不会改变。毕竟,“上岗”的核心是创造价值,岗前培训正是人形机器人发挥价值、赢得市场信任的基础,也是其规模化落地的关键前提。
免责声明:本文通过参考公众媒体内容,整理、翻译、编辑而成,仅供读者参考。文中的观点和内容不具有任何指导作用,对读者不构成任何项目建议或承诺!如果本文不慎侵犯您的权益,请与我们联系,我们将及时处理。