
点击关注

已关注公众号


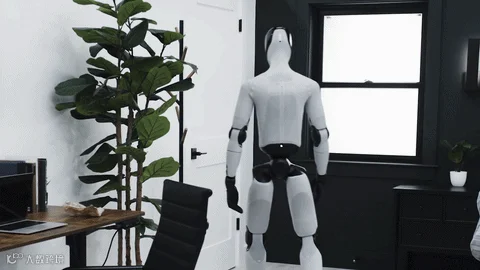
不到两分钟,卧室门被精准拉开、椅子归位、垃圾入桶、衣物归位,最后两台人形机器人配合点头示意,共同完成铺床叠被。
这不是CG特效,而是Figure AI最新发布的双机协同真实Demo。当机器人不再单打独斗,而是像人类同事一样配合完成复杂家务,人形机器人的下半场,已经从单机炫技转向群体协同。

双机协作做家务:比人类更稳的默契,到底难在哪?
家庭场景一直是人形机器人落地的终极考场,狭小空间、柔性物体、动态干扰,每一项都是传统机器人的噩梦。而Figure这次直接把难度拉满:两台Figure 03在无中央控制、无显式通信的情况下,自主完成全流程家务协作。
视频里最震撼的不是单个动作流畅,而是无脚本默契。一台机器人开门,另一台有序进入;推椅子不用手,全身协同发力;扔垃圾时单脚踩桶盖,身体稳如泰山;铺床时抓角、等待、点头、同步拉伸,柔性被子在动态中被平整铺开。创始人Brett Adcock直言,它们在协同整理上,比大多数人类做得更好。

很多人觉得家用买两台不现实,但这次Demo的核心价值根本不在家庭消费。它真正证明:人形机器人可以在共享动态空间里,实时理解同伴意图、动态分配任务、规避冲突、持续协作。这是工厂、物流、仓储、商业服务等规模化场景的刚需 —— 未来不是一台机器人服务一个人,而是一群机器人协同完成一套流程。
双机协同的难度,是单机的指数级跃升。单机只需要理解环境,双机必须实时理解另一个动态智能体。卧室空间有限,每一秒对方的位置、姿态、任务进度都在改变,被子软质变形会让预设抓握点失效,一台的动作随时重构另一台的决策环境。传统规划框架直接崩盘,只有端到端实时智能才能扛住。
Figure的两台机器人靠视觉感知彼此动作,每秒数十次意图预测与轨迹修正,没有无线指令、没有中央调度、没有预设时序,完全靠本地模型 + 环境观察达成协作。这种能力,才是具身智能从实验室走向产业的关键门票。
Helix 02三层大脑:如何让机器人从能干活变成会配合?
支撑这次突破的,是Figure的Helix 02端到端具身模型。官方强调核心算法未改,仅靠新增数据就实现移动、操作、感知的深度融合,这背后是架构代差。
Helix 02采用三层级联神经架构,完美复刻人类“本能 - 反射 - 思考”的决策逻辑:
- ● System 0(执行层):1kHz超高频运行,负责平衡、接触、全身协同,替代超10万行手写C++代码,是机器人不摔倒、动作柔顺的底盘能力。单脚踩桶盖、全身推椅、开门时身体随门移动,都靠这一层实时稳定躯干。
- ● System 1(战术层):200Hz高速视觉运动策略,融合头部、掌心相机与指尖触觉传感器(精度达3克),把感知瞬间转为全身关节指令,应对动态变化与柔性操作。
- ● System 2(战略层):7–9Hz低频语义推理,70亿参数视觉语言模型,负责理解场景、拆解任务、规划长时序逻辑,确定 “先开门→再收物→最后铺床” 的完整流程。
-
三层各司其职又深度耦合,实现从像素到全身的端到端控制。机器人看到门、把手、同伴位置,直接输出关节力矩,跳过传统中间件,延迟更低、鲁棒性更强。

对比行业普遍痛点:过去机器人“走”和“抓”是两套系统,导航不管手,操控不顾重心,长时序任务必崩;Helix 02把移动与操作融为一体,实现真正的Locomanipulation(移动操作一体化),走路时稳定抓持、操作时自然移动,这是双机协同的物理基础。
更关键的是协同范式创新:两台机器人运行完全相同的模型,不共享规划、不互通数据,只通过视觉观察同伴姿态反推意图,自主判断等待、配合、避让。这是全球首次用单一神经网络实现多机器人无中心协同,意味着未来可轻松扩展到N机集群,而不用重构通信与调度系统。
柔性铺床为何是技术巅峰?
铺床看起来普通,却是人形机器人操控的珠穆朗玛峰,集合三大顶级难题:
1、柔性体变形:被子无固定形状、无固定抓点,拉伸、悬垂、滑动全程变化,传统刚性定位完全失效,必须实时建模与力控自适应。
2、双机同步力控:两台机器人同时施力,力度、速度、起点稍有偏差就会褶皱、拉扯甚至失衡,需要毫秒级协同与力反馈闭环。
3、狭窄空间动态避障:床边活动范围小,还要兼顾行走、转身、抓取,全身平衡与路径规划压力极大。

Helix 02给出教科书级方案:System 0保障全身稳定与力协调;System 1实时修正抓取与拉伸轨迹;System 2统筹 “抓角 - 等待 - 示意 - 同步 - 铺展 - 叠放” 全流程。两台机器人像有心灵感应,你抓我等、你停我动,点头不是特效,是视觉确认后的协同信号,把柔性任务做成标准化流程。
这不仅是家务演示,更是工业柔性作业的前置验证。物流包裹分拣、汽车内饰装配、纺织衣物处理,都面临柔性体与动态协同难题。Figure用卧室场景低成本验证了硬核技术,路径清晰:家用Demo→技术验证→工业落地。
120天产能暴涨24倍 量产与群体智能的战略共振
这次双机Demo不是孤立技术秀,而是Figure产能爬坡后的必然选择。官方数据:已交付超350台Figure 03,120天内产能从日产1台飙升至每小时1台,提升24倍。当机器人进入规模化量产,单体智能必须升级为群体智能,才能释放产业效率。

行业正在形成共识:人形机器人的终极价值不是单机替代人类,而是群体协同重构生产与服务流程。工厂多机装配、仓储多机分拣、酒店多机保洁、养老多机照料,都需要无冲突、高效率、自适应的集群能力。过去靠中央调度、高精度定位、专用通信,成本高、扩展性差;Figure证明,端到端具身智能可以用通用视觉实现低成本、高鲁棒协同,打开规模化落地大门。
对比国内外同行:优必选推进群脑网络与工业多机实训;国内团队聚焦舞台矩阵协同;而Figure直接在非结构家庭环境完成全自主、无中心、长时序、柔性操作双机协同,技术领先性明显。它证明人形机器人可以摆脱专用部署,走向通用化、低成本、可扩展的群体作业。
从单体到群体,人形机器人的终局之战开始了
Figure双机铺床,标志着人形机器人行业完成关键一跃:从单体具身智能,走向多机协同智能。

过去我们关注机器人能跑、跳、翻、拿杯子,这些是 “单兵能力”;现在机器人能配合、协同、共完成任务,这是 “军团能力”。现实世界没有那么多单打独斗,效率来自协作。当两台机器人可以默契铺床,十台、百台就能在工厂、仓库、商场里高效协同,替代大量重复性劳动,成本持续下降,普及速度会远超预期。
Helix 02与Figure 03证明,具身智能的核心不是堆砌参数,而是让机器人像人一样理解世界、配合同伴。不用预设脚本、不用海量代码、不用中央指挥,靠视觉与端到端模型,就能在动态环境里完成复杂协作。
这两分钟的铺床视频,看似平静,实则是行业拐点。当机器人学会组队干活,我们距离通用机器人时代,真的近了。
往期推荐

融资10亿!上海国资重仓AMD前员工
吴夏青是谁?为什么离职英伟达创业?
点赞鼓励一下
图片来源:网络
本文不作为投资建议