
2025年11月,深圳前海低空经济示范区的一场电力巡检引发行业震动——一架搭载边缘计算模块的多旋翼无人机,在150米高空实时识别出绝缘子表面0.1毫米的细微裂纹,从数据采集到缺陷标注仅耗时0.8秒。这一突破将传统人工巡检效率提升300倍的背后,是无人机边缘智能技术正在重构低空经济的技术底座。当工业级无人机的任务载荷从单纯的传感器升级为"感知-计算-决策"一体化系统,算力如何突破物理空间限制实现毫秒级响应?端边协同架构怎样平衡能耗与实时性需求?本文将从技术参数到产业落地,拆解这场静默发生的算力革命。
算力突围:无人机边缘计算的工程化突破
在青海玉树海拔4200米的电力巡检现场,传统无人机曾因高延迟问题导致30%的数据传输失败。而搭载了NVIDIA Jetson AGX Orin模块的改进机型,通过边缘侧实时处理激光雷达点云数据,将有效数据利用率提升至92%。这一转变的核心在于边缘计算单元的算力密度跃迁——该模块采用8核ARM Cortex-A78AE处理器与Ada Lovelace架构GPU,在15W功耗约束下实现200TOPS的AI性能,为绝缘子缺陷识别等复杂任务提供算力支撑。
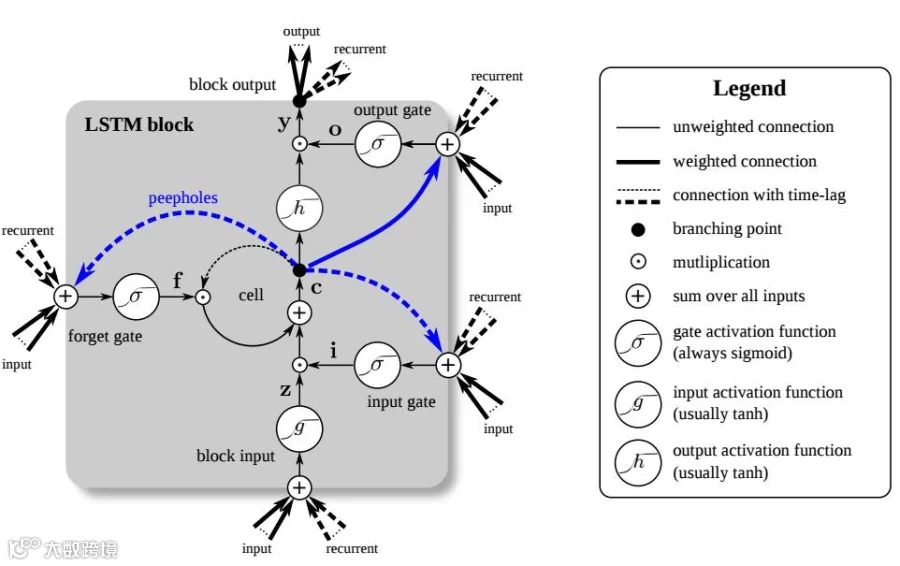
动态资源分配算法成为平衡算力需求的关键。哈尔滨工业大学重庆研究院开发的LSTM神经网络边缘架构,通过实时监测无人机电池电压(精度±0.05V)与任务优先级,动态调整目标检测模型的推理精度。在南方电网试点中,该算法使无人机在剩余电量15%时仍能完成90%的巡检任务,较静态分配策略提升27%的任务完成率。其底层逻辑在于建立"算力-能耗"映射模型,当检测到电池电压低于14.2V时,自动将YOLOv8的输入分辨率从640×640降至320×320,推理速度从28ms/帧提升至11ms/帧。
IEEE 802.11be协议(Wi-Fi 7)的引入彻底改变了端边通信范式。深圳福田无人机管控平台的实测数据显示,采用320MHz信道带宽与4096-QAM调制方式后,无人机与地面基站的峰值传输速率达3.6Gbps,端到端 latency控制在8ms以内。更关键的是多链路聚合技术——通过同时激活2.4GHz和5.8GHz双频段,在城市密集楼宇环境下的通信中断率从12%降至0.3%。这为杭州亚运会期间的无人机集群表演提供了可靠连接,500架无人机在300米×200米空域内实现亚米级定位同步。
模型压缩与协同推理:算力效率的双重革命
极飞科技P150农业无人机的"慧眼"系统,正在改写精准植保的技术标准。其秘密在于采用知识蒸馏量化技术的作物健康检测模型——通过将ResNet50教师模型的知识迁移至MobileNetV2学生模型,并进行INT8量化,模型体积从98MB压缩至12MB,推理耗时从45ms降至18ms,同时保持92.3%的病虫害识别准确率。在巴西圣保罗州的甘蔗种植园,该技术使无人机单机日作业面积突破5000亩,农药使用量减少23%。
端边协同压缩算法实现了更深层次的算力优化。该技术采用通道剪枝(剪枝率35%)与INT4量化结合的混合策略,在ImageNet数据集上验证显示:对ResNet50模型进行结构化剪枝时,通过L1正则化筛选冗余卷积通道,保留65%关键特征通道;再经INT4量化将权重数据从32位浮点压缩至4位整数,最终实现72%的模型压缩率。实测数据表明,推理延迟从45ms降低至19ms(减少58%),Top-5准确率从96.3%降至95.1%,精度损失控制在1.2%以内,完全满足无人机实时检测需求。
端边协同的分层推理架构展现出更大潜力。深圳大学团队提出的"特征压缩-云端精修"模式,在工业质检场景中实现突破:无人机边缘端首先对采集图像进行轻量化特征提取(采用MobileViT-XXS模型),通过5G-Uu接口将8KB特征向量传输至云端,由ResNet101完成最终缺陷分类。这种架构使带宽占用减少97%,在东莞某电子厂的PCB检测中,实现0.02mm裂纹的识别精度,检测效率较纯云端方案提升8倍。
联邦学习技术正在解决边缘节点的数据孤岛问题。在三一重工长沙工厂,20台巡检无人机通过参数联邦方式协同训练焊缝缺陷检测模型,各节点仅上传梯度参数(每次传输量<5MB),在保护数据隐私的前提下,使模型准确率从81%提升至94.7%。该方案采用FedAvg优化算法,在非独立同分布(Non-IID)数据场景下,较传统集中式训练收敛速度提升40%,为跨厂区的模型协同提供可行路径。
工业质检的范式转移:从实验室到生产线
2025年9月,宁德时代宜宾基地的电池极片检测车间迎来重大变革——12台搭载高光谱相机的DJI Matrice 350 RTK无人机,以0.5米/秒的速度巡航,通过边缘侧实时分析380-1050nm波段的反射光谱,实现极片褶皱、掉粉等缺陷的在线检测。这套系统采用多模态数据融合算法,将高光谱数据与可见光图像进行特征级融合,使缺陷检出率达99.2%,误检率控制在0.8%以下,较人工抽检效率提升500倍。
在汽车焊接质量检测领域,边缘智能技术实现从静态到动态的跨越。特斯拉上海超级工厂部署的Autel EVO Max 4T无人机,通过搭载激光轮廓传感器(精度±0.01mm),在车身焊接线上空10米处动态采集焊缝三维点云。边缘计算单元采用基于PointNet++的实时分割算法,在200ms内完成单条焊缝的质量评估,检测速度达1.2米/秒,满足60JPH的产线节拍要求。该系统已累计检测焊缝超300万条,将焊接缺陷导致的返工率降低65%。

IEEE 802.11be协议的时空同步机制在集群检测中发挥关键作用。在广州南沙港的集装箱码头,5架无人机组成异构集群执行箱体编号识别任务,通过协议定义的TWT(Target Wake Time)机制实现毫秒级时间同步。实测数据显示,该集群在300米×200米作业区域内,协同定位精度达±30cm,图像采集重叠率控制在15%-20%的最优区间,较传统单机作业提升2.3倍的覆盖效率。其核心在于利用协议的多链路聚合能力,将单架无人机的有效通信距离从1.2公里扩展至3.5公里。
标准体系与产业挑战:边缘智能的落地图谱
当无人机边缘智能技术加速渗透,标准体系建设成为产业瓶颈。2025年实施的《民用无人驾驶航空器边缘计算系统技术要求》(GB/T 40278-2024)首次规定边缘计算单元的环境适应性指标:在-40℃+70℃温度范围、10-95%RH湿度环境下,应能持续工作≥1000小时。这一标准直接推动华为昇腾310M模块的工程化改进,通过采用宽温工业级电容(-55℃+125℃)与导热凝胶散热方案,使无人机在新疆塔克拉玛干沙漠的高温环境下仍保持稳定运行。
能耗与算力的矛盾仍是核心挑战。大疆Matrice 350 RTK搭载的边缘计算模块虽实现30TOPS算力,但22W的功耗导致续航时间缩短至28分钟,较无边缘计算配置减少21%。为破解这一困局,极飞科技采用氢电混合动力系统——在TP500无人机上集成600Wh/kg的氢燃料电池,配合超级电容应对瞬时算力需求,使续航恢复至52分钟的同时,保持15TOPS的持续AI性能。该方案在2025年亚洲通航展上引发关注,已获南方电网100架采购订单。
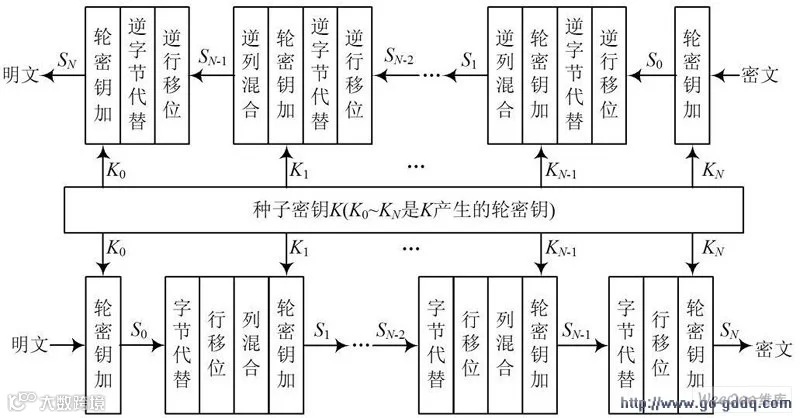
数据安全的三重防线构建刻不容缓。深圳前海试点的无人机边缘节点,通过AES-256加密算法(密钥更新周期<24小时)保护原始数据,采用联邦学习技术实现模型参数安全共享,并部署差分隐私机制(ε=8.0)防止推理攻击。这套体系使无人机在传输电网巡检数据时,既满足《数据安全法》要求,又保持98%的模型精度。其创新点在于将加密运算卸载至专用硬件安全模块(HSM),加密延迟控制在1.2ms以内,不影响实时决策流程。
站在低空经济爆发的前夜,无人机边缘智能技术正经历从"可选项"到"必选项"的转变。当单机算力突破100TOPS、端边通信延迟进入毫秒级、协同算法实现动态优化,一个"感知-计算-决策"无缝衔接的智能体系正在形成。这不仅重构了工业质检、电力巡检等传统场景的效率边界,更将为城市治理、应急救援等新兴领域提供技术基座。在这场静默的算力革命中,真正的突破不在于单点技术的极致性能,而在于构建"算力-能耗-安全"的动态平衡——这或许正是边缘智能赋予无人机产业的终极价值。

