

2018第三届中国国际高效电机及系统节能高峰论坛
点击文字链接 了解更多会议信息
机器人的应用日渐广泛,对工业生产与提高效能有重要作用。工业机器人主要利用伺服电机进行运动控制,从而实现移动和抓取工具。本文将详细讨论伺服电机的特点以及不同类型伺服电机相应的控制原理。
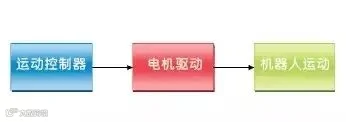
图1:机器人的运动控制系统。
运动控制原理
运动控制与机器人密切相关。工业应用中的机器人必须透过由多款电机所构成的致动器才能自行移动,以执行任务或透过机器手臂抓取工具。
机器人的运动控制系统通常由电机控制器、电机驱动、电机本体(多为伺服电机)组成。电机控制器具备智能运算功能,并可传送指令以驱动电机。驱动可提供增压电流,根据控制器指令以驱动电机。电机可以直接移动机器人,也可通过传动系统或链条系统让机器人移动。
输出类型
移动机器人往往用于探索大范围面积的土地,并能够使用各种螺旋桨、机器脚、轮子、轨道或机器臂移动。例如各种NI展示平台,包括VINI、VolksBot与Isadora。这些机器人分别使用了全向轮(Mecanum wheel)、一般轮以及机器手臂。而针对嵌入式控制,则可通过NI CompactRIO等嵌入式平台,并整合实时控制器与FPGA。CompactRIO亦包含可重配置机箱,能够容纳多样化的I/O配置,包含传感器输入与电机控制。
VINI是使用全向轮的机器人平台,能以多方向行进。除了像传统轮子般的前进与后退,全向轮亦可将轮轴旋转为相反方向,以任何方向行进。此款车轮已普遍用于必须能在狭小空间中移动的自动堆高机等应用。
VINI还是一款地图描绘机器人,通过NI工业级控制器与CompactRIO执行路径规划与数据处理作业。嵌入式的工业级控制器提供雷射扫描地图,并执行机器视觉处理,让CompactRIO接收传感器数据,并在摄像机系统上控制伺服电机。

图2:VINI机器人。
VolksBot搭载的车轮是由德国的弗劳恩霍夫研究所(Fraunhofer Institute)所开发的。
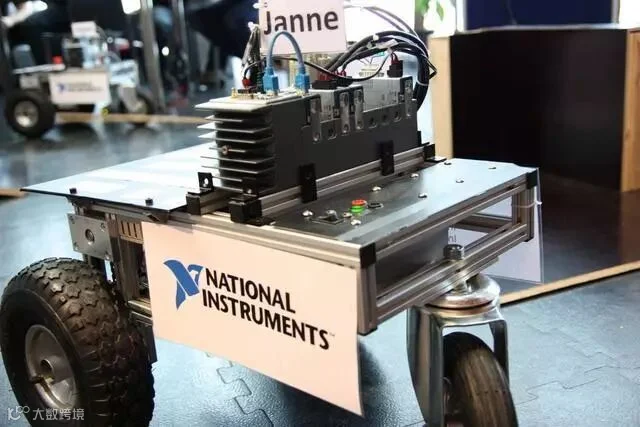
图3:德国Fraunhofer Institute研究机构开发的RT3 VolksBot。
Isadora则是一种会跳舞的人形机器人,经由人类操作缩小版的机器人以取得输入数据。接着开始移动自己的机器手臂与躯干,以模仿缩小版机器人的运动。Isadora采用2组CompactRIO,其中1组用于仿真已记录的运动,另1组则是让机器人重现运动轨迹。

图4:Isadora跳舞机器人。
伺服电机控制原理及其类型
伺服电机是机器人应用中常见的一种电机,其基本控制原理是利用控制回路、结合必要的电机反馈,从而协助电机进入所需的状态,如位置与速度等。由于伺服电机必须通过控制回路了解目前状态,因此其稳定性高于步进电机。
伺服电机有不同种类——带刷式与无刷式。有刷伺服电机与无刷伺服电机之间的差异在于其通讯机制。伺服电机的工作原理是根据反向磁力,进而移动或建立转矩。最简单的例子有固定磁场与旋转磁场。只要改变流过磁场的电流方向,即可变更磁极,并让磁极(转子)开始旋转。变更线圈的电流方向,即所谓的“换相”(commutation)。
有刷伺服电机
有刷伺服电机(brushed motor)的控制原理即是通过机械式电刷,改变电机线圈中的电流。由于有刷电机能改变流入的电流方向,因此可由直流电源(DC)供电。有刷伺服电机可分为2组零件:
.电机机壳即具有场磁铁(Field magnet),即定子(Stator)
.转子(Rotor)是由线圈所构成,中间具有铁制核心,并连接至电流变换器
电刷则接触电流变换器,将电流导入线圈中。在使用一段时间之后,电刷即可能磨耗并对系统产生摩擦力;但在无刷伺服电机中则不会发生此种情况。
无刷伺服电机
大多数的无刷伺服电机均使用交流电源(AC)。无刷伺服电机的控制原理是将铁制核心置于外部。当转子成为暂时性的磁铁,定子则成为绕铁线圈。外部电路的电流将会在既定的转子位置进行反转。所以,此款伺服电机是由交流电所驱动的。当然亦有无刷DC伺服电机。这些电机一般均具备某些电子切换电路,可针对流入的DC进行变换。无刷伺服电机的价位较高,但较无磨损问题。
步进电机
在机器人运动应用中,步进电机不如伺服电机普及,但仍为电机的重要范例,而且使用方式较为简易。与伺服电机相比,步进电机的速度较慢亦较为精确。步进电机中具有一系列内建的无刷齿(Brushless teeth),可在电流通过而改变电磁电荷后,由下一组刷齿拉动转子,前一组刷齿推动转子,从而为步进电机通电。
相较于伺服电机,由于步进电机可通过刷齿的数量(即等于所移动的距离)进而精确进行控制,因此一般情况下并不需要反馈。但可能因为障碍物而遗漏刷齿,因此可用编码器做为反馈。
运动控制器与软件架构
许多制造商均建立了自家的驱动系统,以操控机器人。在考虑机器人应用中的运动控制系统时,可先了解初阶的网状循环,如下图所示。
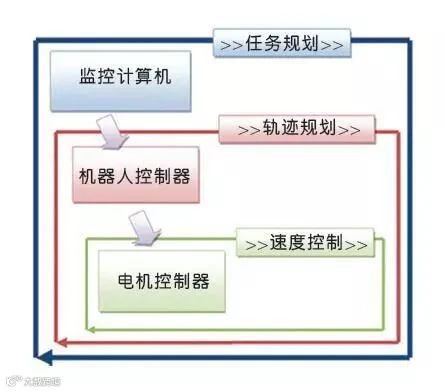
图5:运动控制软件架构。
至于机器人任务规划的较高阶功能,则是让机器人的行动达到最终的目标。它可能是以单一指令囊括多组目标,或可让机器人进入特定位置。若机器人采用遥控(Tele-operated)架构,那么这些指令最可能通过连接板外(off-board)的计算机而传送的,而且可在此人为操作选择机器人的后续动作或行为。在完全自动化的机器人中,根据决策用算法的不同,任务规划亦可能直接在板上执行。
在规划路径时,往往会产生“我应该如何到目的地以完成此任务?”或是“我应如何让机器手臂移动到该位置?”等问题。而此种问题均可由机器人运动控制器完成。
一旦清楚目的地与行进速度之后,伺服电机控制器将发出控制信号(PWM或电流等)至实际的电机驱动,使其得以到达目的地。一般均以PID建构控制功能。另请注意,此时亦应建置安全性功能。举例来说,若高速行进中的机器人在目前的路径上侦测到人类,则应发出紧急信号以停止电机或立刻煞车。
来源:《电子工程专辑》
声明:本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!010-80709300

2018第三届中国国际高效电机及系统节能高峰论坛
论坛结构
时 间 |
论 坛 |
上 午 |
下 午 |
3月27日 |
9:00-15:00会议签到 15:00-18:00采购对接会议 |
||
3月28日 |
第三届中国国际高效电机及系统节能高峰论坛 |
||
欢迎晚宴 |
|||
3月29日 |
会议闭幕,参会代表返程 |
||
3月27日
09:00-15:00 嘉宾签到
15:00-15:30 采购团逛企业展位
15:30-15:35 主持人开场介绍
15:35-18:00 采购商与意向供应商一对一深度对接交流
18:00-20:00 交流晚宴
3月28日)
08:30-09:00
参会代表入场(三楼东吴厅)
09:00-09:15
开幕式
09:15-09:20
主办方致开幕辞
09:20-09:25
主持人开场
浙江省电机行业协会陆柏生常务副秘书长
09:25-09:50
主题发言——
中国工程院院士、电机专家、博士生导师、中科院电工研究员顾国彪院士
09:50-10:15
主题演讲——
沈阳工业大学电气工程学院、电机与控制技术研究所所长 张炳义教授
10:15-10:40
主题演讲——
东北大学信息科学与工程学院、电力系统与电力传动研究室所长王大志教授
10:40-10:55
茶歇与交流
10:55-11:20
技术报告——
横河电机(中国)有限公司北京研究开发中心市场部乔靖宇部长
11:20-11:45
技术报告——
中国航天科技集团、运载火箭技术研究院第十八研究所黄玉平副总预研师
12:00-13:00
交流午餐(酒店一层)
13:30-13:35
主持人开场
浙江省电机行业协会 陆柏生 常务副秘书长
13:35-14:00
主题报告——
绿色电机专委会副主任、全国泵标准化技术委员会秘书长、全国泵节能中心主任、浙江工业大学工业泵研究所牟介刚所长
清华大学电机系、国家千人计划专家 张品佳 教授
14:00-14:25
技术报告——
湘电集团电机股份有限公司电机研究所吴若欣所长
14:25-14:50
主题报告——
清华大学电机系、国家千人计划专家 张品佳 教授
14:50-15:15
主题报告——
国家千人计划专家、剑桥大学电机专业博士、上海英磁新能源科技有限公司裴瑞琳总经理
15:15-15:30
茶歇与交流
15:30-15:55
技术报告——
浙江永发机电有限公司技术部副部长(博士)李巧珊
15:55-16:20
技术报告——
瑞士丰罗绝缘材料(上海)有限公司技术支持经理 雅重庆
16:20-16:30
2018年电机产业链优秀供应商企业颁奖仪式
16:30-16:55
主题报告——
科磁上海电机有限公司总经理陈春华
16:55-17:40
高峰对话——
电机企业、行业专家、协会领导
18:00-20:30
欢迎晚宴

浙江省湖州市东吴开元名都酒店 (浙江省湖州市吴兴区劳动路555号)
电话:400 0181 112
参会要求/类别
供应商要求:
1、符合采购商的采购需求类别
2、供应商参与对接人员层级为总监或以上
3、供应商分享人员需为技术线或产品总监及以上
4、符合条件的供应商需缴纳会务费用获取入场凭证,无凭证者不能参加活动。
供应商类别需求:
2、国内知名电机生产厂(工业电机、新能源电机厂代表)
3、电机零部件(铸件、冲片、轴承、绝缘漆、电磁线等电机配套零部件)供应商、采购商
4、电机控制及智能化产品供应商
5、电机及零部件自动化产业系统集成商
【会议赞助】
欢迎电机产业企业以各种形式支持、赞助会议,其中包括作为大会的协办单位、支持单位、会议纪念品赞助、新技术、新产品、新材料推广及其他显要形式会议报告、现场搭建展位等。因场地展位及宣传席位有限,请有需要的相关企业尽早与大会秘书处联系。

微信扫码了解更多详情及报名
会务联系:
采购商参会报名
电 话:010-80709300
张 宇:13621201845(同微信)
参会报名及会议赞助
宋 伟:13521204506(同微信)
方 峥:17610900992(同微信)
于成然:13488664078(同微信)
往期精彩回顾


