

当机器人坐在钢琴前,用一双人造的“双手”弹奏乐曲,与流畅灵动的音乐共同协作的,是灵巧手内部组成的机械复调,“乐章”由紧密集成的电机、传动部件和执行机构共同谱写。作为机器人与真实世界交互的“最后一厘米”,灵巧手将会朝着更高自由度、更接近人手灵活度的方向发展。手部不同部位的分工协作,重在实现刚性与柔性的平衡。
灵妙动力推出的四款执行器,分别是可用于手部近指节的玄驱ZG11和ZG12(MCP)、布置在掌心位置的玄驱L10和L16。作为灵巧手不可或缺的硬件组成,它们是机器人的“潜力载体”。下文将从技术维度详细介绍四款产品,看它们如何定义灵巧手的性能边界。
ZG11最大速度20rpm,堵转扭矩0.32N·m,峰值电流0.6A
ZG12最大速度20rpm,堵转扭矩0.16N·m,峰值电流0.6A
ZG11、ZG12旋转执行器可用于不同手指的近指节(MCP)。高自由度决定了灵巧操作的上限,这要求手指关节在轻巧的外表之下,内部驱动、传动和执行环节结构更紧凑、配合更精准。作为驱动、传动一体的核心部件,ZG11和ZG12以一体化集成的结构优势、可靠有力的性能表现让手指在有限的体积内也能做到“快”、“准”、“稳”。
我们采用“空心杯电机+涡轮蜗杆传动”的主流方案,“无骨线圈”既消除铁损,也满足轻量化、低能耗的要求,电机小体积、快响应、高转速的特点和蜗轮蜗杆的垂直传动结构相结合,高度适配手指关节,让手部灵活、轻巧、有力。
在工业场景下,为了提高生产效率和产品质量,机器人的手指必须响应快、动力足。ZG11、ZG12以空间交错轴传动方式在狭小空间内完成电流到扭矩的转化与传递。两种产品兼顾安全性和节能效率。蜗轮蜗杆导程角小于摩擦角,天生具备反向自锁特性。

如何轻轻拿起一颗50g的鸡蛋,力控精准且鸡蛋完好无损?
从驱动系统来看,磁性材料性能的提升和绕线工艺的优化能够加强电机的扭矩输出能力。ZG11、ZG12堵转扭矩分别为0.32N·m、0.16N·m,赋予灵巧手优秀的性能表现,能满足日常生活中的大多数抓取场景。在大减速比的加持下,电机为手指关节传递高扭矩,让灵巧手抓得准、抓得紧、抓得稳。
掌指关节(MCP)是整个手掌灵活性和力量的源头。ZG11、ZG12从驱动和传动结构上赋予关节强劲动力和高扭矩密度,为灵巧手搭建了坚固的动力基座。
L10重复精度±0.02mm,行程10mm
最大速度35mm/s,最大推拉力>90N,堵转推拉力>90N
L16重复精度±0.02mm,行程16mm
最大速度35mm/s,最大推拉力>90N,堵转推拉力>90N
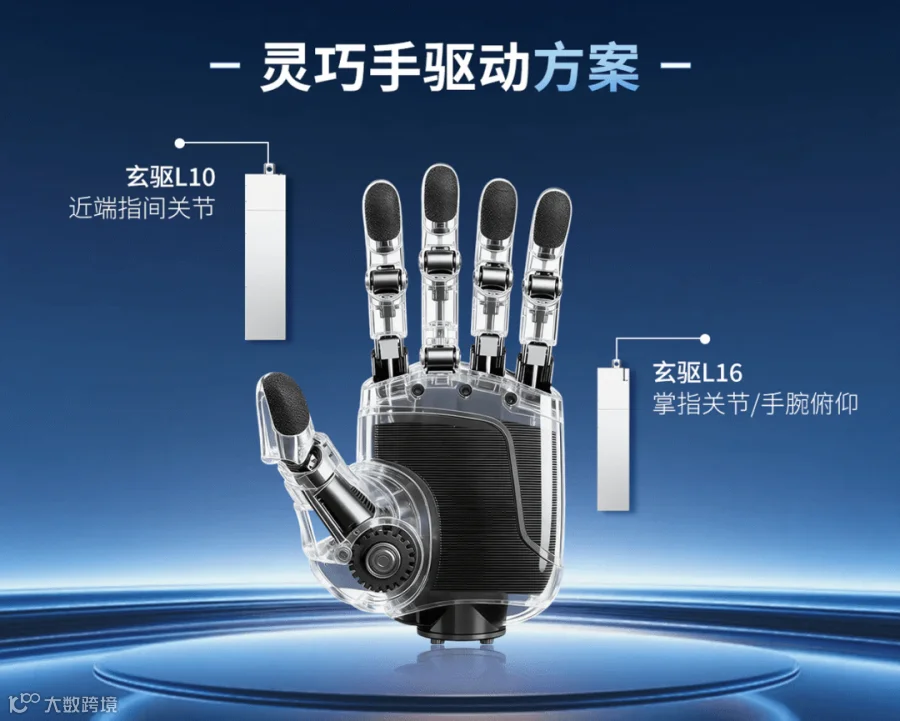
直线执行器可用于手掌内部,是整个手部灵活运动的核心动力来源。作为线性关节的核心执行器,手指整体抓握、复杂腕掌动作都离不开它。
手部动作密集,重复度高,保持良好的作业连续性和高效率是关键。L10、L16在结构设计上,简化传动环节,通过丝杠传动直线性推力,精密梯形丝杠传动平稳、噪音低、成本可控,这种“准一体化直驱传动”的结构能够有效降低能量损耗。
L10、L16内置微型伺服电机,具有动态响应快、定位精准、刚性强的特点。在伺服电机的作用下,手部受到外力时,可自动修正位置误差;断电重启后,可准确定位,定位精度±0.02mm。
玄驱直线执行器系列10mm、16mm行程适配手掌空间,最大推拉力>90N。精密紧凑的结构在缩小体积的同时提升刚性,兼顾灵巧有力和稳定耐用,专为成本而生。
从力量生成和调度、到肌肉控制和精准执行,直线执行器和旋转执行器的精妙传动,形成了由电力到抓握的完美链路。玄驱系列旋转执行器已在采用直驱方案的16个自由度灵巧手中使用,腱绳驱动方案的灵巧手上则搭载了玄驱直线执行器产品。两种执行器精度控制能力出色,可广泛用于灵巧手和智能玩具、智能装备等产品上,在不同应用场景下适配不同传动方案。
