
人形机器人正在从技术演示走向产业落地。过去几年,行业最关注的是大模型、端到端控制。这些能力决定机器人能否理解环境和指令,并在复杂场景中做出判断。但当机器人真正进入商业场景,一个更底层的问题会迅速浮出水面:机器人不仅要“想明白”,还要“动得稳定、动得便宜”。决定这一点的核心部件,正是关节模组。
在一台人形机器人中,关节影响整机成本、重量、续航、噪音、发热和可靠性。并且关节成本可占整机成本的35%—45%。这意味着,机器人要从实验室样机走向规模商用,关节模组必须先解决稳定量产和可靠交付的问题。这正是灵妙动力成立的产业背景。
灵妙动力(北京)科技有限公司成立于2026年1月,由灵心巧手等联合发起设立,专注于为行业提供AI驱动的机器人解决方案。公司延续灵心巧手在灵巧手微型模组领域的产业化经验与塑料关节模组技术积累,在研发与制造关节模组及微型驱动的基础上,以AI设计方案实现从关节、灵巧手到机器人的全流程定制化生产。
在面向人形机器人、协作机器人、智能玩具等领域,灵妙动力希望提供人人可负担的高性能、高可靠性产品。公司研发的AI工具HandBuilder、RoboBuilder,把过去依赖经验的硬件设计流程,转化为更高效的工程能力。
更重要的是,灵妙动力的产品体系坚持全自研。
这使它不只是一个零部件供应商,而是能够从产品定义、结构设计、驱动控制、成本优化到量产交付,深度参与机器人运动系统构建的产业伙伴。
01
演示阶段看智能
量产阶段看硬件
大模型和算法让机器人具备更强的理解能力,但真正进入场景后,机器人需要长期面对负载、冲击、磨损、发热和重复运行。软件可以快速迭代,硬件必须接受物理世界的持续检验。
机器人每一次抬手、转身、行走、抓取,背后都是多个关节的协同工作。一个关节的精度、温升、寿命或成本出现问题,都会在整机中被放大。
因此,行业对机器人关节的要求,归根到底可以概括为六个字:体积小、扭矩大、能量产。
但是难点也在这里。做得小,往往会牺牲输出能力;做得强,又容易带来重量、发热和成本压力;做得精密,还要同时满足批量制造的一致性和价格要求。
灵妙动力的产品,正是围绕这组平衡展开:在更紧凑的结构内提升能力密度,降低综合成本,让关节模组更适合机器人、巡检、教育、玩具等场景的规模化应用。
02
以玄驱系列为核心
构建一体化高精度产品矩阵
围绕机器人与智能装备的高精度传动需求,灵妙动力形成了以玄驱系列行星关节模组为核心,覆盖直线执行器与旋转执行器微型驱动的产品矩阵。
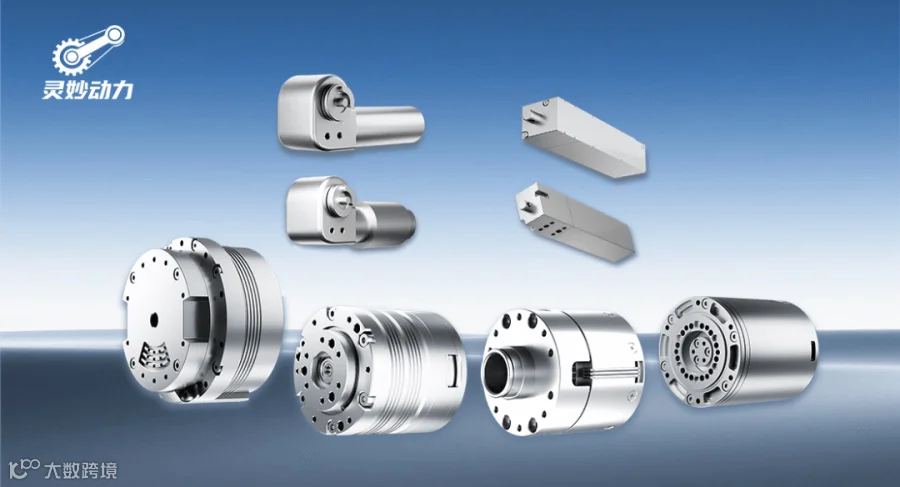
其中,玄驱系列行星关节模组峰值扭矩覆盖5.6N·m至80N·m,峰值转速覆盖87RPM至168RPM,可适配不同负载、不同空间约束下的关节应用;直线执行器与旋转执行器微型驱动,则补充直线驱动和小型传动场景,拓展产品在机器人、自动化设备、智能装备及娱乐设备场景当中。
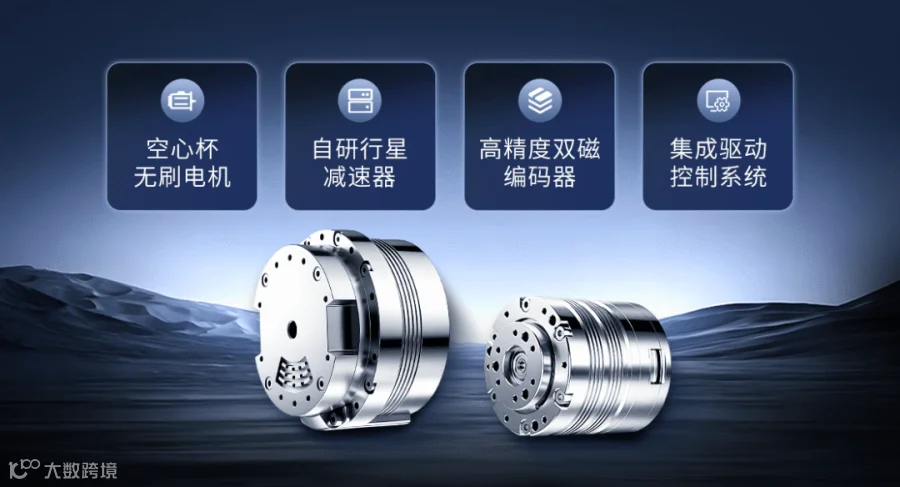
在技术上,灵妙动力采用一体化设计,将定制空心杯无刷电机、自研行星减速器、高精度双磁编码器和集成驱动控制系统整合进紧凑结构中,使关节模组具备高扭矩密度、低背隙、高集成度和长寿命等特点,帮助客户减少结构适配、布线调试和系统集成成本。
03
以AI设计提升定制效率
推动产品多场景落地
针对机器人硬件开发中需求分散、迭代周期长、试错成本高的问题,灵妙动力将AI设计能力引入研发流程,自研HandBuilder和RoboBuilder两大工具,面向灵巧手、微型驱动和机器人整体方案设计,大大提升方案生成、结构适配和产品验证效率。
在市场路径上,灵妙动力前期以通用机器人等关节场景作为核心切入口,实现玄驱系列行星关节模组在机器人核心部位的应用价值;中期向自动化设备、智能装备等批量应用场景延展;后续进一步布局智能玩具、娱乐设备等消费级市场,让高精度传动能力进入更广泛的场景。
机器人产业正在从技术验证走向真实应用。越接近量产,越需要有人把底层硬件做扎实。灵妙动力选择从关节模组和微型驱动切入,做的正是这件基础但关键的事:把复杂的传动、驱动和控制能力,变成客户更容易集成、更容易验证、更容易交付的产品体系。
