

文章要点
1. 特斯拉传感主要是视觉,激光雷达对其当前的硬件方案性价比不高。
2. 自研FSD芯片异构性较好,适合自动驾驶深度学习,EEA由分布式走向混合式。
3. 自动驾驶开发采用自研路线,可实现整套系统的持续升级迭代。
4. 当前面临的问题包括单一传感器或导致稳定性不足,此外应严格约束用户使用场景。

本文核心观点:
1. 特斯拉感知系统基本依靠视觉,且按照当前的硬件预埋,若采用激光雷达将导致此前积累的行驶数据可用性大幅下降。
2. 自研的FSD自动驾驶芯片具有较好异构性,电子电气架构由分布式逐步走向介于域控制器式与集中计算式的混合式。
3. 在自动驾驶的开发模式上,采用自建团队的自研路线,在经历了最初阵痛期之后自研优势显现,可实现对整套自动驾驶系统的持续升级迭代。
4. 当前自动驾驶面临的问题主要包括过度依靠单一的传感器或使传感系统稳定性不足,同时应该对用户使用场景作出严格约束。
一、特斯拉自动驾驶技术方案
1. 战略层面:
目前特斯拉主要还是做单车智能,虽然也提出了V2X,但还未真正实施。在开发策略上,从L1到L4均有软件、自研AI芯片及OTA的布局。主要关注的场景是高速行车场景及低速泊车场景,覆盖用户用车的全部逻辑链。另外希望通过不断的OTA升级的方式使现有用户买到的特斯拉产品变成未来可以在城市内完全不需要人的Robotaxi的基础。
特斯拉的感知系统基本依靠视觉。造车新势力及传统车企,更愿意使用毫米波雷达,如一般在车身的四个角共配备四个77GHz毫米波角雷达,同时辅以摄像头。特斯拉采用的技术路线是配备8颗摄像头+1颗毫米波雷达。
特斯拉不采用激光雷达,原因主要包括以下两点:
1. 截止2020年年底,全球特斯拉车辆保有量大概100万台。按照特斯拉的发展策略,希望这100万台未来能够成为Robotaxi自动驾驶出租车的基础,但这也同时意味着未来的高级别自动驾驶所使用的传感器要和当前低级别的一模一样,因为不可能让目前已购车的用户将来全部到店增加传感器。因此特斯拉目前面临的问题是未来的商业模式需要现有车辆通过持续付费的方式来获得更多功能,而同时硬件层面最好不需要额外增加,因此需要通过现有的视觉方案来解决高级别自动驾驶问题。
2. 另外,特斯拉通过影子模式的用户协议收集到了大量的行驶数据。做自动驾驶算法时,如果传感器冗余,即收集到的数据偏多,仅需去掉一部分即可,但如果传感器少了,是无法补回的。当前车辆在收集数据时,收集到的是摄像头及毫米波雷达的数据,而在这些场景中没有激光雷达,那么激光雷达的数据后续无法补回,因此特斯拉面临的问题是,如果将来方案修改为增加激光雷达,则此前所积累的所有数据其可用性便会出现大幅度的下降,因此按照特斯拉目前的车辆硬件预埋,激光雷达的技术路径性价比并不高。
因此在技术上具备先发优势的同时,也会有先发劣势,这里的劣势便是当保有量足够大的时候,在转身时,在平台硬件升级时,便面临一定问题。
2. 技术层面:
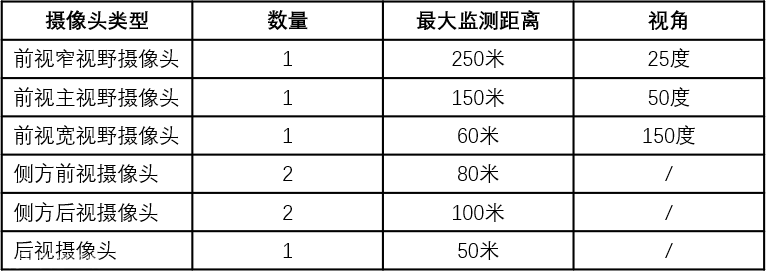
传感器方面:目前特斯拉基本依靠视觉,配备8个摄像头,另外配备仅1颗前置毫米波雷达及12颗超声波雷达。8颗摄像头包括前置的长焦、中焦、广角摄像头各1颗,前视和后视的侧方摄像头各2颗,后视摄像头1颗。
计算平台:最早采用Mobileye的EyeQ3,但由于Mobileye的数据对特斯拉不开放,无法做定向化修改,后来换为NVIDIA的PX2,而NVIDIA算力及功耗比无法满足特斯拉未来需求,因此最后改为自研FSD芯片。
特斯拉Autopilot版本对应的数据处理单元架构:
1. Autopilot1.0为1颗英伟达Tegra+1颗Mobileye Q3;
2. Autopilot 2.0版本为1颗英伟达Tegra Parker;
3. Autopilot 2.5版本为1颗英伟达Tegra Parker +1颗Pascal架构GPU;
4. Autopilot 3.0版本为2颗自研的FSD芯片。
特斯拉自研芯片最早在2017年有了样片,通过持续迭代升级,在2019年实现了较为完整的产线。特斯拉芯片具备较好的异构性,比较适合用于人工智能算法,主要有3个模块构成,包括CPU、GPU和NPU,其中CPU可理解为每次针对某一个数字的高精度浮点型运算,GPU可理解为每次针对某一个矩阵的低精度浮点型运算,而NPU,即张量运算器,特点是可以同时对多个矩阵进行运算,因此NPU非常适合深度学习的运算。特斯拉芯片的异构性,使其非常适合应用于以视觉为主、多种传感器融合的自动驾驶方案,是目前行业内计算能力比较强大的芯片。
自研FSD芯片具有强大的算力,约100T,为将来的硬件预埋做了较为充分的准备,对比现阶段的Mobileye Q4的算力大约4T,小鹏P7采用的芯片算力大约30T,华为的自动驾驶芯片算力大约60-70T。
系统冗余:特斯拉非常强调系统冗余,高级别自动驾驶需要系统在转向、制动、电源、传感器、控制器等均需要备份,不可出现系统失控的情况,现阶段特斯拉所使用的冗余能力比传统车企及造车新势力均更出色,尤其转向冗余,成本非常高,特斯拉是目前市面上为数不多的可以实现量产的转向冗余车企。
电子电气架构:由分布式逐步走向混合式——介于域控制器式与集中计算式,并没有达到完全的集中式,是一部分的域控制器和一部分的中央集中式控制器的组合,还存在一些离散的ECU,后续迭代升级或将完备起来。对于智能网联的功能,包括自动驾驶、车载娱乐、网关路由等,实现了域化并支持OTA,核心域控制器均自主开发,具备较强的自主开发能力。配电系统,供电按照“就近分配”原则,
数据平台:通过赠送用户哨兵模式功能,使用户愿意签署数据共享的协议,即影子模式,特斯拉以此可收集到大量的用户数据。影子模式收集到的数据包括两种:第一种是将车辆没有见过的场景,包括图片及视频,上传至云端;第二种是,自动驾驶算法对车辆的行驶作出自己的判断但并不干预驾驶,当其作出的判断与驾驶员的实际驾驶操作不一样时,将其上传至云端,以便工程师对其进行分析,判定是自动驾驶算法的错误还是驾驶员实际操作的错误,以便快速筛选出自动驾驶算法有待优化的地方。
OTA升级:特斯拉最早实现了FOTA,即整车级别的空中软件升级。2012年4月份开始汽车升级,截止2020年初已进行50多次FOTA,涉及的领域和控制器较为丰富,尤其是智能网联、车载娱乐、自动驾驶方面的功能,其升级速度较快。
二、特斯拉自动驾驶开发模式的特点
特斯拉在自动驾驶方面颠覆传统车企开发模式的一个重要方面便是自动驾驶系统的自研。由于汽车是一个非常复杂的工业品,传统车企在很多领域并不自己亲自做,而是交给各家供应商,车企做的是整车层面的系统整合。特斯拉在2015年推出的Autopilot 1.0采用的是自研的算法,但功能性其实很差,系统非常不稳定,但随着收集的数据越来越多,系统越来越强,自研的优势逐渐凸显,可以持续的对自研的这套系统进行迭代与升级,甚至在通过影子模式收集了足够大量的数据之后,特斯拉于2020年下半年对其Autopilot整体架构做了重构。
对自动驾驶的整套系统持续进行迭代升级,是传统车企目前非常难以实现的。车企如果希望将自动驾驶的软件算法作为产品出售给用户,令用户对此付费来激活自动驾驶功能,那么车企必须要向用户提供具有足够稳定性及持续升级能力的自动驾驶功能。实现OTA的前提是要掌握核心代码,而这便需要开发团队进行自研并掌握底层核心技术,因此便必须要经历一段时间,这段时间里车辆使用自研系统,但效果可能会比较差。
车企如果想对标特斯拉,必须面对的阵痛便是,需要自建团队而且要保证软件人员的数量,必须有一套自己的软件算法和代码并持续OTA升级与迭代,同时为了保证未来能够继续升级迭代,还需在硬件上做预埋,而且还要忍受自研系统在相当长一段时间由于不够成熟而被用户和市场所诟病。只有熬过了这段阵痛期之后,自研系统的优势才能显现出来并最终转换为车企的核心价值与竞争力。
三、自动驾驶当前面临的问题
随着ADAS功能性的提升,用户对其依赖度也越来越高,ADAS系统的稳定性面临的风险也越来越高,安全问题愈发需要得到重视。
在安全方面,相比摄像头,四个毫米波角雷达或更将保险,因为毫米波雷达在视线受阻或恶劣天气等情况下,依然可以识别出前方的障碍物,尽管或许并不能识别出具体是什么物体,但可以给车辆提供此时应该减速刹车的信号。过度相信某一种传感器(如视觉传感器摄像头),单一的传感器维度将导致系统稳定性不足。
特斯拉用户对Autopilot的滥用比较明显,比如ADAS功能不应该在某些城市道路里面开启,但很多特斯拉用户仍然在城市道路使用该功能,因此出现事故便难以避免。此外,有些用户在驾驶时长时间双手离开方向盘,甚至可以通过一些方法骗过系统对脱手的限制。
OEM应该在限制使用场景上严格约束用户,不应出现使用场景不达标而用户依然可以使用,并最终导致事故的发生。另外设计的系统应在一定的条件下强制退出,比如当天气不好时或者当场景受限时,例如速度过快等,此时如果驾驶员不接管,系统应该发出强提醒来要求驾驶员接管,而目前的接管机制及相关惩罚机制均较弱。

郑重声明:以上内容是作者基于公开信息所做的判断,仅代表个人或嘉宾观点,与本网站、任何公司与任何机构立场无关,不构成任何投资建议。文章未经作者书面允许,禁止转载。
更多详细信息,请联系:吕方/Michael LU (Michael@acecamptech.com)

