

导语:
2017年12月12日,数阵赋能2017 x 嘉定“智能出行产业先锋论坛邀集中国智能出行产业新锐势力齐聚上海杨浦区创业者公共实训基地,互联网及科技领域业内人士就智能出行紧密相关的各行业发展现状与趋势进行了深入的探讨,共同展望智能出行新技术新模式新趋势。
2016年,博世汽车与智能交通技术在中国的销售额达到663亿人民币,这一数字在2017年预计将维持两位数的增长。未来,博世与汽车业务相关的组织架构将发生变化。2018年1月1日起,博世集团汽油系统和柴油系统将进行整合,成立动力总成事业部。博世还将于2018年成立智能网联事业部,统筹所有与汽车网联相关的业务。

博世底盘控制操作系统事业部丰浩
2017年12月12日,数阵赋能2017 x 嘉定“智能出行产业先锋论坛邀集自动驾驶技术水平领先的企业聚集主旨演讲“技术篇:自动驾驶奇点何时降临”上,博世底盘控制系统事业部丰浩先生针对自动驾驶安全问题分享了演讲。以下是演讲内容:

大家下午好!我是来自于博世底盘控制系统的产品经理我叫丰浩。这几年我们一直在做一件事情,如果你不被改变早晚会被自动驾驶的浪潮拍死在前浪,我们也在经历这样的改变。从传统提供硬件的零部件供应商,现在也在逐步转变成向提供软件以及Sarvice(音)这样的企业,今天跟大家简单分享一下博世目前在自动驾驶上朝着量产方向做到了哪一步。今天的主题自动驾驶的奇点什么时候到来,但是想说一下自动驾驶的起点是什么时候开始的,作中国自动驾驶何时享受到。

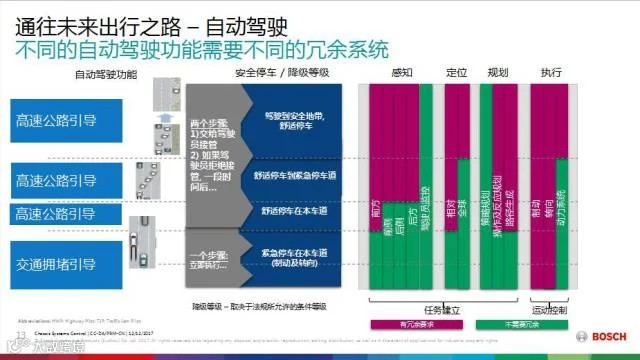
我们在很多场合都用这张图分别从1级到5级,从1级到5级我们认为自动驾驶有两条路,同样博世也认为这是有两个市场,一个市场是我们可以直接从4级和5级开始做。我们认为这是一个直接迈入更高等级的,当然我们在这个领域并没有落下脚步我们和戴姆勒公司合作自动驾驶共享出租车的项目,直接从4级开始起步。另外我们认为这是广大的蓝色市场,跟随传统主机厂随着技术一步一步往上升级实现从1级到5级的进展。

这是大家非常熟悉的感知、决策、执行,感知层面我们拥有驾驶辅助以及环境感知所需要的所有传感器,包括毫米波雷达、超声波雷达、摄像头等等。今天一个最关键的问题也就是环境感知给大家举一下博世目前在技术上处在哪一步,对于环境感知我们要想要自动驾驶你敢不敢坐进去?我们需要一辆非常安全的车,安全车需要有非常高的可靠性也就需要自动驾驶系统对原始的环境模型建立有一个可靠的环境感知,现在的传感器大家可以想象其实都是为了ADAS开发的,ADAS更多的还是集中于辅助作用,但是如果我们真的让系统取代人来做驾驶,那对于环境模型的建立要求就非常高,所以博世会为自动驾驶需求也就是更复杂的场景开发下一代传感器。这里面包括毫米波雷达、前置摄像头、超声波传感器、环置摄像头,以及我们为传感器多样性和冗余性开发的激光雷达。
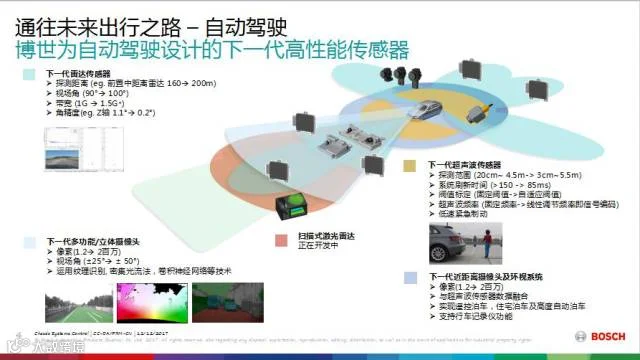
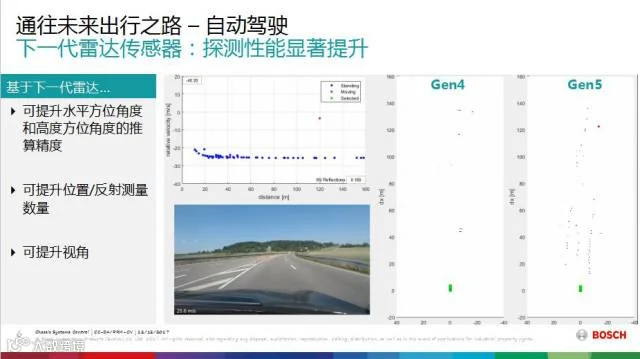
在下一代雷达上我们应用了一些非常先进的技术,比方说我们应用了新的调制方式,通过发布快速连续波进行调制方式的改变。通过引用更高的带宽实现分辨率的提高,这样就可以做到对于原始环境更为复杂的感知,我们对于像卡车这样的大型物体可以得到比现在的传感器更多的反射点,同时对于道路边界的还原也更为清晰,这就是我为环境感知做的一个非常好的基础。

前置摄象头上我们也应用了非常多的技术,我们应用的是多层次语义理解的场景重现技术,怎么理解它?每一层可以做不同的设计。比如专门有对纵深进行检测的、对纹理进行检测的、对物体进行区分的,将语义层进行3D还原就可以得到对环境更为可靠的感知。

这里面应用的最主要技术是密集光流检测法相当于现在稀疏光流检测法技术要求非常高,这也得益于我们完全自主设计的SOC也就是运算系统,由于这强大运算系统的支持带来的是可以对200万全像素进行光流检测,不先区分物体的情况下对于单个像素上单流随时间变化进行检测可以得到非常清晰的光流变化方便我把物体识别出来,特别是受天气影响或者低光照情况下的场景就可以得到非常好的原始的信息,同样通过技术把光流从光流信息中得到物体运动信息再对物体进行分类,这样保证我们可以在原始的情况下漏掉任何一个检测目标提高检测可靠性。

对于自动驾驶来讲希望传感器用得更远,我们目前有自己独特的一套算法,可以根据路面的高低起伏进行3D式的检测,但3D式的检测就够了吗?可能有些区域高低起伏是可以的但是路面并不一定适合通行,比如前方可通行车道上有雨、冰、雪,这样靠传统的3D式检测是不可靠的,下一代摄像头可以检测路面不同的纹理,通过对比不同的纹理将2D检测和3D检测结合起来就可以做到非常可靠冗余的可通行区域的检测,同时由于SOC未来支持高达800万像素的支持理论上是可以做到更强更可靠的检测的。

第一种叫做协同式融合,所谓的协同式融合也就是说每一种传感器对于环境感知各有优缺点,比如说对于雷达前向物体的纵向信息是非常精准的,但是对于形状和横向位移由于角度分辨率是有局限性的,反之这就是摄像头的优势。但是摄像头在环境,比如受恶劣天气影响、黑暗光亮度的影响下反而是毫米波雷达的优势,所以我们对于融合的目标会取它各自优势的信息,这个融合的目标我就可以综合以上的Best of the best。同时每一个传感器又对单个目标进行概率分析我们得到的是组合式概率叫冗余式融合,这样对物体可靠性的分析就非常高。

我们上述所用到的技术和强大数据融合带来的是什么?是对于未来自动驾驶的几个挑战。首先在自动驾驶上,现在的传感器设计所支持的运算量最多就是1000个dmps,但是未来随着预算场景和复杂程度预算量是成倍增加的。未来我们2019年底会向市场上推出专门用于集成算法以及做中央运算的ADAS或自动驾驶大脑来支持更高等级L2、L3、L4的自动驾驶。
在定位上面我们也有自己的解决分按,包括对于GPS的修正服务、全球定位系统、车辆动态信息我们有一个VMPS传感器可以提供这样的服务。包括今年4月份我们跟3家图商进行合作,将传感器数据融合到高精度地图中帮助地图实现精度更高、冗余性更强的相对定位服务我们叫做博世道路特征。这里面我特别提一下,传统的道路特征一般都是由摄像头提供的交通标识线,博世利用我们在毫米波雷达上35年的开发经验可以将毫米波雷达的道路边界融入到信息中提高定位精度。
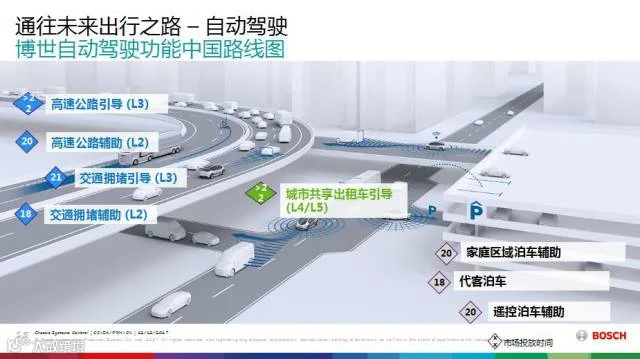
最后大家都比较关心的一个问题,自动驾驶什么时候会在中国落地?低速段的L2自动驾驶今年就会落地,L2的高速公路辅助2020年在中国实现量产,2021年可以实现第一个L3的交通拥堵辅助功能。再往上的高速公路引导会陆续在2020年之后在中国实现,2022年之后在中国实现量产,同时不仅关注于传统的一级及升级市场,对于智能出行我们也和戴姆勒公司在自动驾驶出租车上进行合作,欧洲会先于中国稍早一步的量产,预计2020年后也会来到中国。还有更小一块就是封闭环境下的泊车系统,2020年也会向家庭区域泊车辅助以及遥控泊车这样的功能带到中国来。

自动驾驶还面临着非常多的挑战比如法规,但是博世在这里面特别是在中国我们本着一个根植本土、服务本土的理念,我们在本土有300多人的ADAS团队、实现了30多个量产项目以及目前200多个在做的项目。

本土这么强大的工程能力,我们也希望能够支持中国自主品牌以及中国的自动驾驶早日实现落地、实现自动驾驶的奇点,谢谢大家。
(正文根据速记整理,未经演讲者审阅)

★ 相关文章,请点击链接 ★
主办单位数阵科技 DT MATAIX 、创梦亚马逊AWS联合孵化器
特别鸣谢以下单位及机构对本次活动的大力支持!
战略合作:上海市嘉定区经济委员会
中国国际广告创意园
协办: 云咫信息 Yunwis
云成 YunTop
支持:上海市就业促进中心
上海市人力资源和社会保障局
中国(上海)创业者公共实训基地
媒体:创业邦、动点科技、车云网、锌财经、科Way、IT老友记、华东科技
参会企业代表:上海北斗导航创新研究院、语镜汽车、快逸行、极目智能、博世底盘控制操作系统、亚马逊AWS中国、斑马智行、首汽GOFUN、悟空租车、车和家、挚达科技、电动集客、宝驾出行、威马汽车产业基金、驾御科技、最会保网络科技等企业及代表。

长按二维码
关注创新 为创业者发声