

想象下,未来的人形机器人不再是冰冷的钢铁,而是可以像人类一样拥有骨骼、肌肉、韧带,可以实现高弹性、柔软安全交互的亲密伙伴。近年来,世界各国随着新型材料和新型传动系统取得了一系列的研究突破,科学家们正在让它变为现实。
#01 Clone robotics
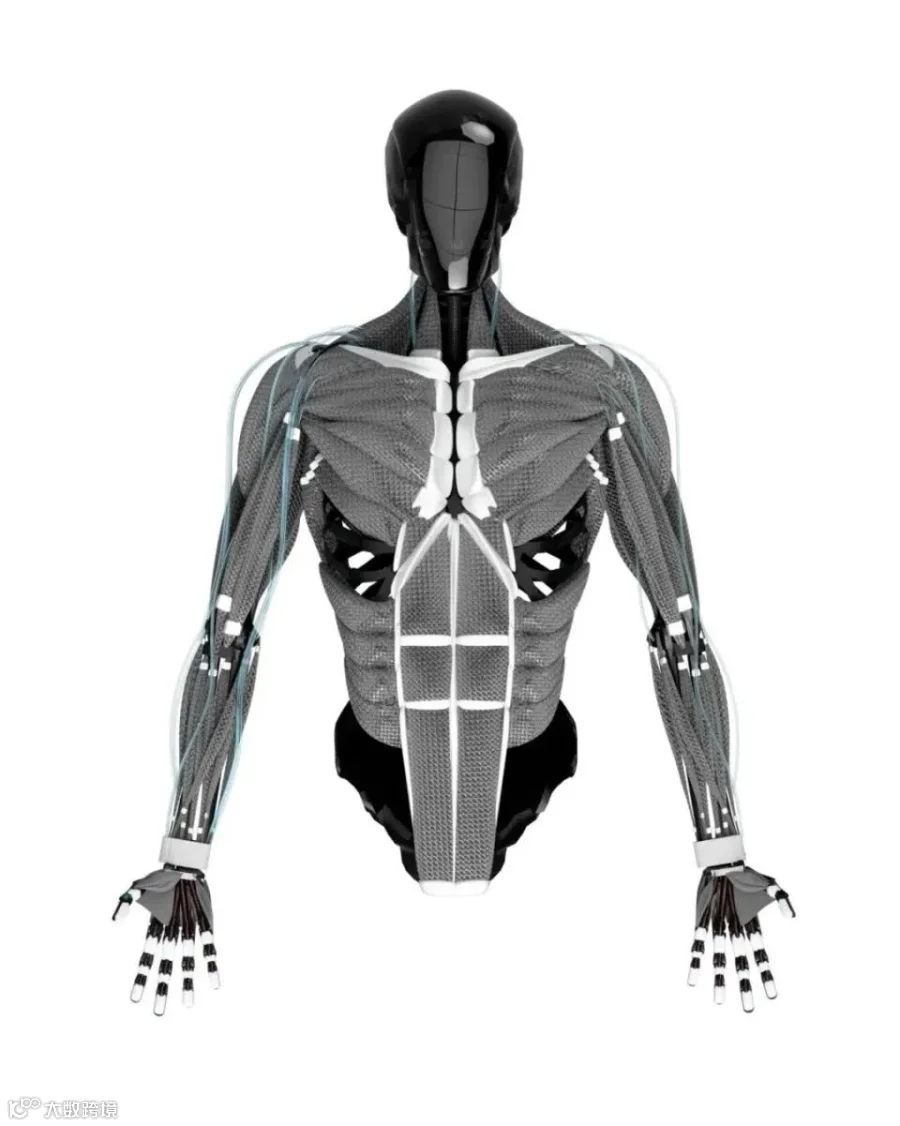
2022年,美国的Clone Robotics制造了一个由分体部件组装而成的仿真机器人。这家初创公司的愿景是以极低价格大批量制造仿真机器人,并承担所有不适宜人类进行的高强度、高危险性的工作。Clone认为,实现这一目标的关键是使机器人在身体构造上尽可能接近人类。为此,公司正在努力解决人体中最难以复制的部分——手臂。
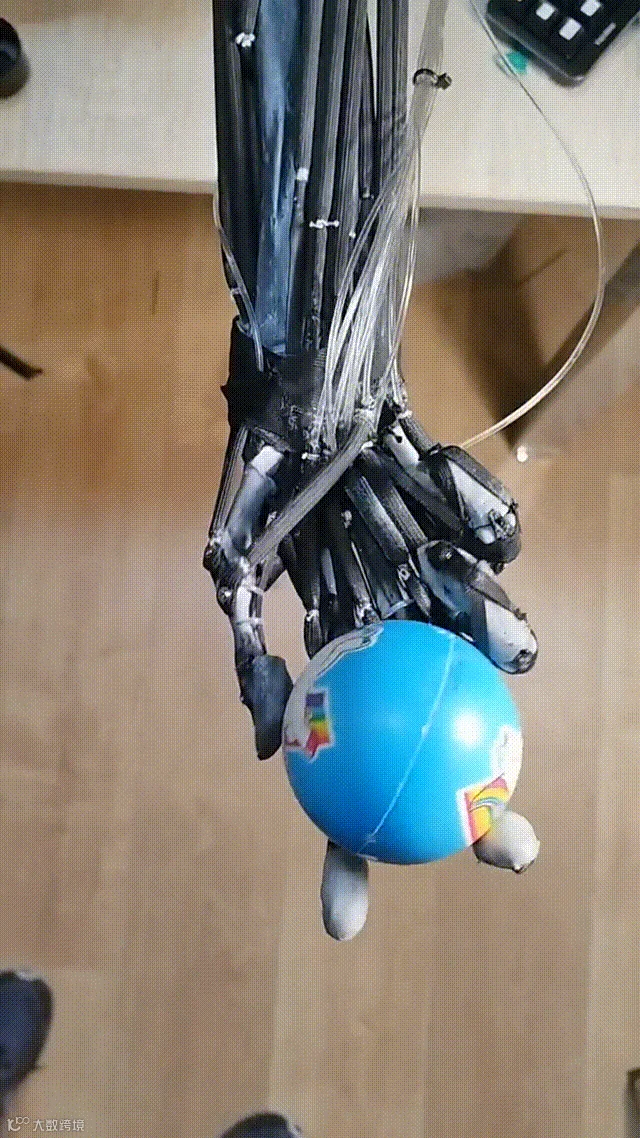
在今年2月份,Clone展示了其研发的第18代合成手,与人类的手一样,这条手臂由人造的骨骼、韧带和肌肉构成。因此,它具有27个可活动关节,这使得它能以极为接近人的方式活动;包括手的36块肌肉在内,手的其余部分均由柔软材料制成,这些肌肉是通过液压系统进行控制。
Clone 有两种驱动装置,一种是水驱动液压方式,另一种是电动的,其中电动结构由几个网管和充满乙醛的气球支撑,只需通过电流,这种化学物质就可以使气球内的大气压力增加六倍以上。通过这种方式,机器人手的创造者能够产生所需的气动压力来移动其不同的部分,而无需使用任何重型外部气泵,随着气球内部压力的变化,网管会相应地收缩或膨胀。

Clone 团队希望他们的人造手可以用作在家庭、工厂和实验室中执行各种任务的器具;期待未来真正实现“克隆保姆”、“克隆厨子”走进千家万户。
然而,目前由于控制装置过于复杂,需要配备动力源、泵、蓄能器、电磁阀、传感器、管路等一系列装置,且液压源、气压源体积较大,暂时没有看到成熟的商业化落地方案,其次,电驱方案中换能装置是电热及乙醛,而乙醛具有毒性致使这个方案面临量产困难等问题。

#02 Roboy
Roboy 2.0
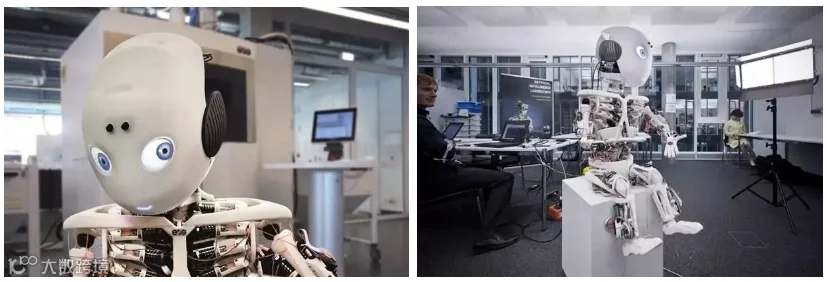
2019年,第二届中国进口贸易博览会上,工程师通创新的设计和超现代化的技术加工工艺等一系列创新方法,在Roboy上重现了人类的骨骼、肌肉和肌腱。
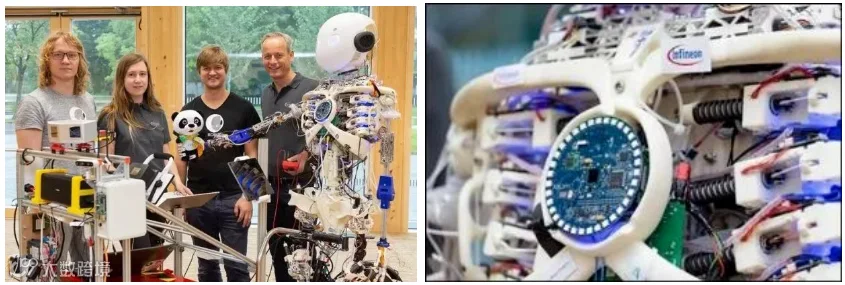
研发人员为Roboy2.0装载了一套发达的神经网络系统,赋予了他听觉、视觉和感知功能,其中胸部集成了具备语音识别功能的麦克风,肩部配置有磁性传感器,手部则将雷达传感器嵌入;在未来的Roboy 3.0上,他的双脚将会搭载英飞凌的60GHz雷达传感器,行走时能够判断路面的材质,并调整自己行走的姿势和步调,同时还拥有丰富的表情和模仿人体的骨骼和肌肉。
Roboy 3.0
Roboy 3.0不仅仅是其前身的进化,它重新定义了机器人身体的含义;上身运动跟踪操作员的位置被机器人跟踪和反映,以获得真正的身临其境的感觉;以低延迟传输立体图像,沉浸式双目视觉使得它不仅拥有视觉,还可以实现双向音频同步,通过机器人说话、反馈,可同时基于GPT对话管理器实现交互。
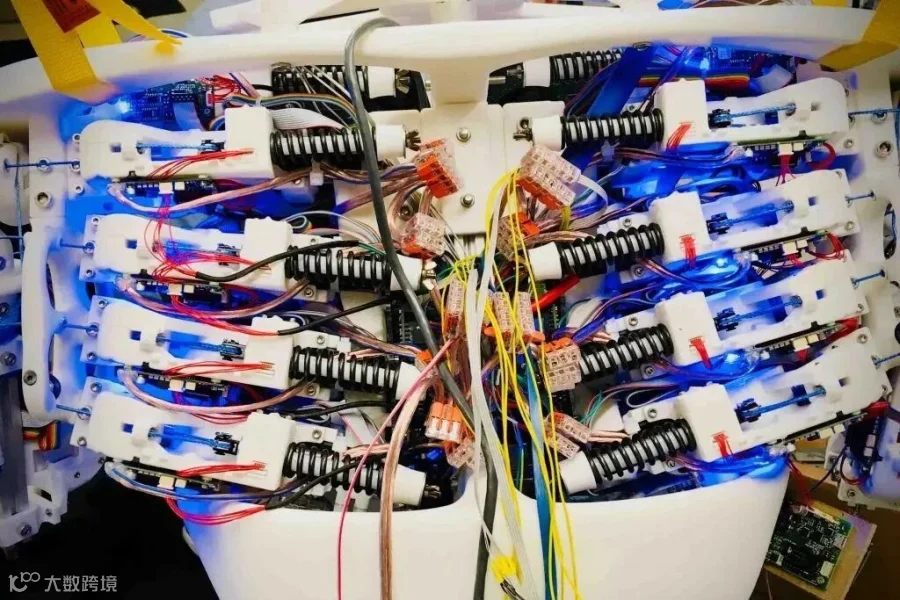
特别是在人类和机器人近距离工作的情况下,Roboy3.0采用柔顺的肌肉骨骼设计,通过广泛使用弹性材料来模拟肌肉和肌腱,从而提高机器人在不确定环境中的安全性、灵活性和适应性。它还可以减少车身重量和开发成本,同时增加设计灵活性。


#03 Kenshiro

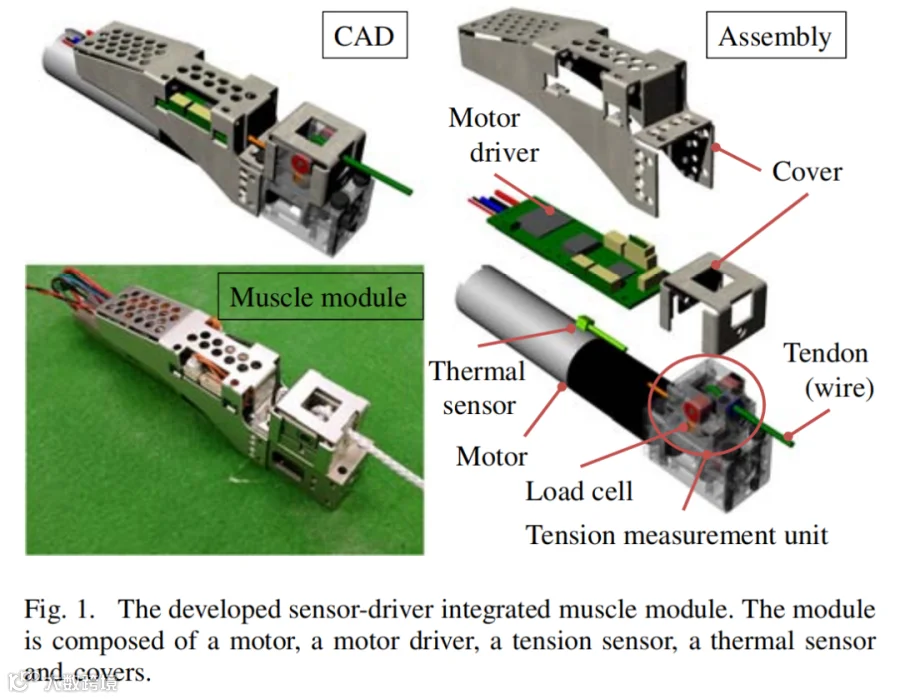
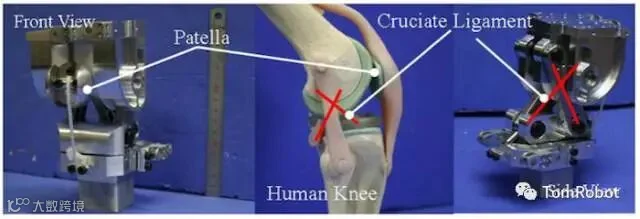
团队研制出可以模仿人类肌肉纤维动作的纤维管,用一种纳米级的网状合成纤维附着在1.2毫米的橡胶软管上,一把把的橡胶软管完全模拟人体不同的肌肉群,通过不同捆束的橡胶软管之间的相互配合,做到了踢球、抬胳膊等高难度的动作

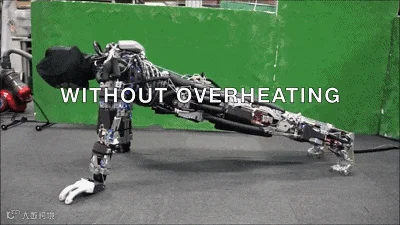
这个名为Kengoro(腱悟郎)的人形机器人由东京大学JSK研究所开发第五代机器人,完全模仿人类的身体构造,不仅拥有仿人的骨骼,还有仿人的肌肉收缩结构,为了散热,还模仿了人类出汗的本领。

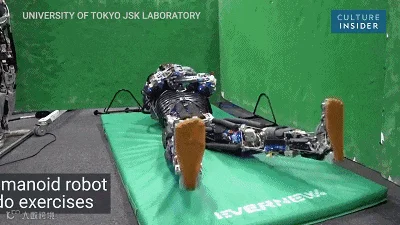
Kengoro机器人靠一杯去离子水,可以正常运转半天。它也像人类一样,要保持自己不缺水来保持体力,它可以持续做11分钟的俯卧撑而不烧坏它自己的电机。
Kengoro的关节部位装有传感器,这些传感器能够收集周围环境的信息,帮助它更好理解人类的动作


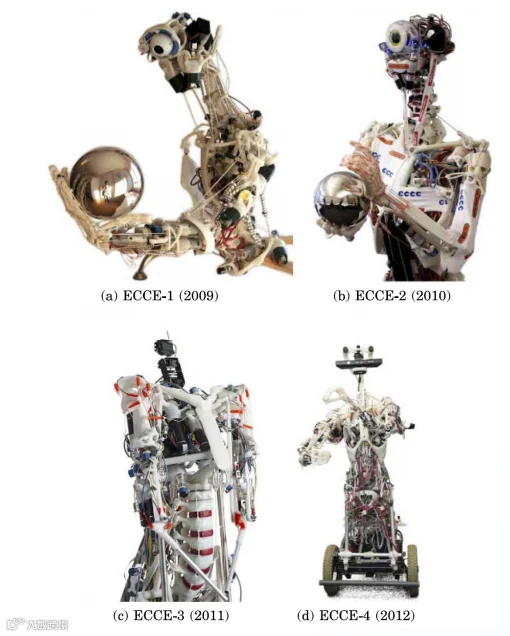
#04 ECCE robot
瑞士苏黎世大学搭建了世界上第一个拥有“肌腱”和“骨头”的机器人平台ECCE Robot,相关研究成果在2010年获得美国Popular Machanics报道,列为2010年10大创新概念首位。
ECCEROBOT由欧盟资助的项目,目标实现真正类人的仿生机器人。根据设计,Ecce robots使用一系列电动马达来驱动身体各个关节运动。而一台充当其大脑的计算机则能够在自己所犯错误中进行学习。如果某一运动导致它摔了一跤,或者掉落手里拿着的东西,它的“大脑”就会收集这些信息并进行分析,以避免下次再犯同样的错误。除此之外,尽管它只有一个眼睛,但它也拥有和人类类似的视觉功能。
#05 Festo


#06 月泉仿生
月泉仿生依托吉林大学和曼彻斯特大学的国际一流科研团队和实验室以及院士教授团队,首创“仿生拉压体机器人”理论,引领仿生科技发展。新型机器人具备“仿生拉压体关节”,该关节模仿并利用了人体关节的“机械智能”特性,使其在具备较高运动自由度的情况下,同时兼顾稳定性,并且能够实现关节刚度的快速自适应调节,采用具有“驱动传动一体化”特征的高效柔性驱动部件作为动力源,克服传统关节驱动机器人的缺点,使机器人具备与人相似的运动特性,同时使机器人实现与环境的安全交互,并且其运动能耗指标CoT仅为人体的1-2倍,真正使人形机器人从幻想走入现实。
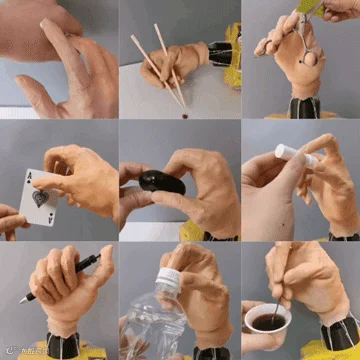
高度类人的仿生智能灵巧手,采用拉压体驱动技术,内置柔性传感器,具有触觉神经反馈,在外力作用下灵巧手可以主动进行移动、屈曲、翻转等动作调整,同时保持手持物体不掉落。除了基础的抓、握等动作外,灵巧手还可以完成27种不同的手部复杂精细操作,例如使用筷子夹取细小物体、涂抹护肤品、搅拌咖啡、刷手机等等,足以应对各类日常生产生活场景需要。

#部分交易案例#
新制造:丨纬尔科技丨中科谱光丨海桓科技丨霞智科技丨磐际智储丨月泉仿生丨宸鲁科技丨智锂物联丨华甪工控丨复亚智能丨纵行科技丨赛诺动力丨格创东智丨沐秦智能丨微至航空丨朗伯威丨极光云能丨微埃智能丨奥腾能源丨炎凌嘉业丨茵塞普丨欧卡智舶丨元泰能材丨
数字化:丨迅策科技丨数库丨恺望数据丨数字栩生丨上海劳勤丨百观科技丨
