
NEWS
2026/01/15
星期四
农历冬月廿七
2026年1月15日 —— DataMesh 今日宣布发布具身智能数据产品解决方案 DataMesh Robotics。该解决方案聚焦工业与设施场景,为机器人本体公司与机器人应用团队提供从工业场景建模、物理属性与传感器仿真、照片级视觉生成到规模化自动真值标注(Ground Truth)的一站式能力,并面向具身智能训练中的关键难题——工业任务目标与奖励信号定义与配置——提供可落地的方法与交付规范。
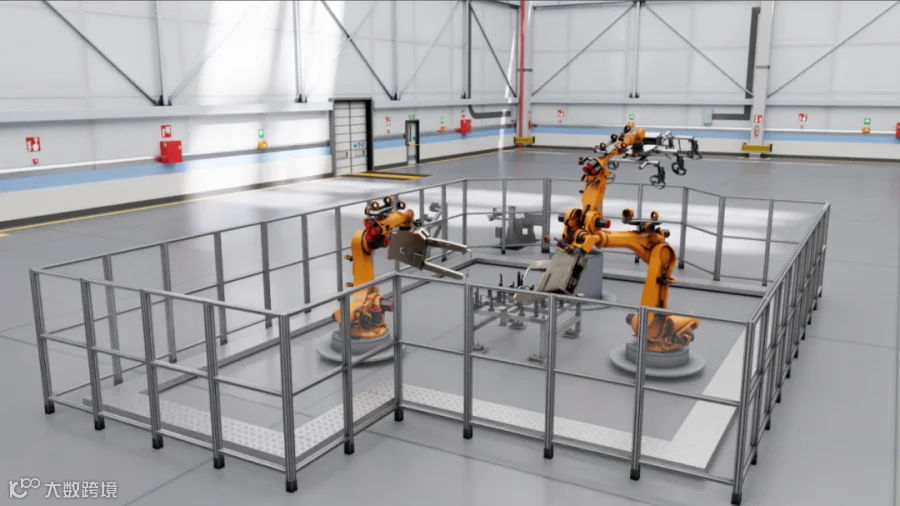
与市场上大量停留在“静态三维可视化/数据叠加”的数字孪生不同,DataMesh 的核心能力之一是:构建具备业务模拟仿真能力的“可运行数字孪生(Executable Digital Twin)”。
在 DataMesh 的数字孪生平台 FactVerse 中,工业世界不是静止的模型,而是可以像自动驾驶模拟器一样“跑起来”的环境:对象可动、流程可演进、事件可触发、逻辑可执行。这种动态仿真能力使 DataMesh Robotics 能够生成更贴近真实工业运行规律的训练数据,并为复杂工业任务提供更清晰、更稳定的奖励定义基础。
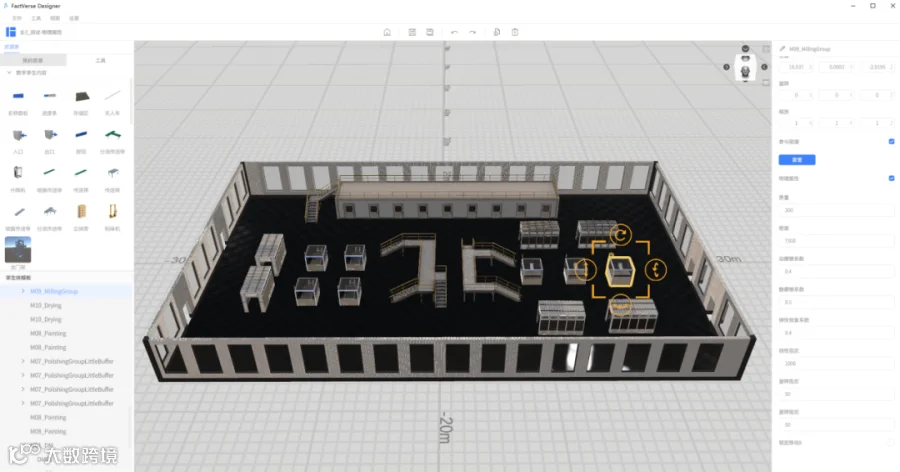
▲ FactVerse 支持配置物理属性
在国际权威研究机构方面,DataMesh 此前已在 Gartner® 关于智能仿真Intelligent Simulation的多分研究报告中被列为 Tech Innovator(技术创新者)和Sample Vendor(样本供应商)。这体现了DataMesh在智能仿真与空间化数字孪生方向的持续投入与能力沉淀。
DataMesh Robotics 将与主流机器人仿真与训练生态兼容,支持将工业数字孪生资产与数据输出到包括 NVIDIA Isaac Sim / Omniverse 在内的仿真与训练环境,并可与企业现有机器人研发与交付流程融合。
▲ 数字孪生数据输出到 Isaac Sim 中进行具身智能训练
当前,DataMesh Robotics 已完成原型验证,并与包括运营商、数据标注供应商在内的企业伙伴开展合作与试点探索。
为什么是 DataMesh Robotics:
工业具身智能真正缺的是“会变化的世界”
工业现场的数据难点不仅在于“采集与标注成本高”,更在于:工业任务往往发生在一个随时间变化、受业务流程驱动、由多种事件触发的世界中。机器人要学会的不只是识别物体,还包括在约束条件下完成一串连续动作:等待—避让—对接—操作—复核—退出……这类任务本质上依赖“动态环境”。
市场上不少数字孪生方案更偏向“静态三维 + 实时数据叠加”的可视化表达:看得见、能展示,但很难“跑起来”。而 DataMesh 的数字孪生强调“可运行”:
对象可动:设备、门柜、托盘、车辆、人员、物流单元等可参与动态变化
流程可演进:生产、运维、巡检、维修维护等流程可按规则推进
事件可触发:告警、工单、设备状态变化、操作步骤完成/失败等可被模拟
逻辑可执行:业务规则与行为树(business logic/behavior tree)驱动环境变化与任务判定
这使得 DataMesh Robotics 能够在仿真中构建“工业运行中的世界”,从而更系统地覆盖长尾工况与安全约束下的复杂任务,并形成从数据生成到训练评测的闭环。
DataMesh Robotics 能做什么:
动态业务仿真为底座的
一站式训练数据与任务定义
DataMesh Robotics 面向机器人研发关键路径,提供从场景到数据、从数据到训练闭环的能力组合:
1. 工业场景建模
从 CAD/BIM、设施结构、设备资产模型与现场约束构建工业级场景
场景与资产可版本化管理,便于团队协作与实验可复现
结合业务仿真能力构建“会变化的场景”:让布局不仅可看,还可运行
2. 动态业务模拟仿真
用业务逻辑与行为树驱动场景随时间演进
支持流程推进、事件触发与多角色/多对象交互
支持真实工业操作逻辑交互,如产线启停、工艺状态切换、异常与规则触发
为多步骤工业任务提供可验证、可重复的运行环境
3. 物理与材质属性(Physics & Materials)
定义质量、摩擦、弹性、关节与约束等物理属性
支撑操作与接触丰富任务:抓取、插入装配、门/柜交互、对接等
4. 多模态数据生成与自动真值标注(Synthetic Data + Ground Truth)
生成照片级视觉数据与多模态输出(按项目配置)
自动产出一致、可复现的真值标签:语义/实例分割、2D/3D 边界框、实例 ID、深度图、关键点、位姿、轨迹与场景元数据
同时输出“不可见数据”:温度、压力、工艺/业务逻辑状态等变量,帮助模型学习更贴近工业真实的条件与约束
5. 工业任务目标与奖励配置
在工业场景中定义奖励目标往往比搭建仿真更难:严格容差、多步骤流程、安全约束、部分可观测与强行业语义叠加,导致目标不清晰、奖励稀疏、训练不稳定。DataMesh Robotics 将提供低代码、配置化的工业任务与奖励定义能力:
基于工业语义的目标与成功条件定义(位姿容差、接触事件、力/扭矩阈值、工具啮合、巡检项完成度等)
奖励塑形、终止条件与课程学习设计,提升训练稳定性与效率
奖励与场景/任务变化联动版本化,便于复现、调试与对比实验
面向目标训练框架的交付形式(配置、脚本、环境封装等),更易接入现有训练管线
6. 面向主流仿真与训练生态的集成
DataMesh Robotics 旨在与现代机器人技术栈协同,支持将场景、资产与数据输出到下游训练与仿真环境(包括 NVIDIA Isaac Sim / Omniverse / Cosmos / MuJoCo等)。
先工业,再通用
DataMesh Robotics 当前的服务对象主要包括:
机器人本体公司:需要快速建立工业落地任务的数据与验证体系
机器人应用业务团队/交付团队:需要针对具体客户现场快速迭代策略、覆盖长尾工况并提高交付稳定性
典型方向包括:工业工位操作与装配、仓储/工厂导航与避障、设施巡检与维护、危险/受限环境演练、多机器人协作任务建模与评测等。
在中国持续推进“人工智能+”与新型工业化的大背景下,制造业正在进入“以数据与仿真驱动智能升级”的关键窗口期。近期,工信部等八部门联合印发《“人工智能+制造”专项行动实施意见》,明确提出到 2027 年要推动大模型在制造业深度应用、打造工业领域高质量数据集并推广典型应用场景等一系列目标,这意味着“高质量工业数据供给、可复制的场景化应用与可验证的智能体能力”将成为产业竞争的基础设施。
在这一政策与产业共振的趋势下,DataMesh Robotics 以“可运行的工业数字孪生(业务模拟仿真)”为底座,让工业现场不只是静态三维展示,而是能随流程、事件与业务逻辑动态演进的训练环境;再结合规模化合成数据与目标/奖励定义能力,能够把“工业任务如何判定成功、如何衡量过程质量”这类最难工程化的部分标准化、产品化,从而更系统地支撑机器人在生产、巡检、运维等核心环节实现更快迭代、更稳落地。
开放试点
DataMesh Robotics 已完成原型验证,并与包括运营商、数据标注供应商在内的企业伙伴开展合作与试点探索。接下来,DataMesh 将继续扩展工业资产库与任务模板,强化动态业务仿真的深度与复用性,并持续完善与主流仿真训练生态的兼容与交付能力。
DataMesh CEO李劼表示:
“具身智能走进工业现场,最大的挑战之一是训练世界必须像真实世界一样会变化。我们不仅提供工业级场景与合成数据,更提供可运行的业务模拟仿真能力,让环境能够随流程与事件演进,并在此基础上把奖励目标定义清楚、把训练闭环跑通。DataMesh Robotics目标是成为机器人团队的工业训练环境与数据引擎,帮助客户更快、更安全、更可控地完成迭代与部署。”。
*NVIDIA、Omniverse、Isaac、Cosmos 为 NVIDIA Corporation 的商标或注册商标。DataMesh Robotics 为独立解决方案,旨在与相关生态实现兼容与集成。
公众号|DataMesh
微博|DataMesh商询科技
长按扫码关注我们

点“阅读原文”了解更多