
导语:
2017年12月12日,数阵赋能2017 x 嘉定“智能出行产业先锋论坛邀集中国智能出行产业新锐势力齐聚上海杨浦区创业者公共实训基地,互联网及科技领域业内人士就智能出行紧密相关的各行业发展现状与趋势进行了深入的探讨,共同展望智能出行新技术新模式新趋势。

2017年12月12日,数阵赋能2017 x 嘉定“智能出行产业先锋论坛邀集自动驾驶技术水平领先的企业聚集主旨演讲“技术篇:自动驾驶奇点何时降临”中,上海北斗创新研究院副院长裴凌率先发表了自动驾驶中自主导航方面的演讲。

裴凌认为虽然面向特定任务的自主导航已逐步应用,但完全自主的定位导航仍是挑战。目前上海北斗创新研究院正在筹划建设无人机测试基地,希望从而推动智能导航技术和自动驾驶技术的整体发展。以下是演讲内容:

谢谢主持人、谢谢主办方,谢谢各位来宾。非常荣幸今天有这个机会和大家分享一下我们在自动驾驶,导航在无人驾驶方面的小体验。今天有点压力,为什么呢?因为我看到在座有非常多做自动驾驶的企业,初创企业和大咖们。我今天分享的是《面向智能无人系统的自主导航》。
今天我的报告想分享三个大方面:一自主导航及应用场景。哪些场景能够非常典型地用到自主导航的,因为自主导航是无人驾驶的必备能力。第二会给一个非常典型我们现在做的智能无人导航平台系统;接着介绍一下我们目前有什么样的能力,给大家分享一下我们的学生和团队做些什么事;最后分享一下我自己的一些看法。

谈到自主导航,大家可以看到我画了很多圈。除了汽车之外,我今天想分享的是无人机还有其他各种各样的机器人,都可以定义它为无人系统、无人平台。另外一方面既然要做无人系统,可能少不了各种各样的网络通信。
我今天着重想分享的是另外三个圈:最上面的一个圈是传感器。现在我们有非常多种的传感器可以用在自主导航里面,比如说视频网络大家现在看到的Wifi、蓝牙、CIID、RFID等等,这些都可以用在自主导航上面。另外是视觉,会前交流过了有些企业非常擅长于视觉,例如单目、双目、全景、光流等等这些都是视觉技术。除了视觉技术之外还有激光,大家知道有固态的、2D、3D的等等。还有我们想非常强调的是GNSS就是卫星导航。卫星导航里面,今天我要做的广告就是北斗系统,未来我们可以非常确信在中国无人驾驶北斗是必须要集成的一项技术,不管是强制性的也好还是实际需求,都会成为必备的一项。最后介绍一个传感器是惯性传感器,大家手机里面有的陀螺仪,这在导航里面特别是在卫星受遮挡的情况下是非常有用的传感器;
第二方面是地图。会前也讨论现在这些地图像高德、百度等等。大家会发现现在的地图特性用来做无人驾驶远远不够的,高精度地图是在很多传感器失效的时候还能提供可靠的数据,这也是我们认为现在无人驾驶里面非常重要的一点。我们还有一些影像、信号等等都可以作为导航定位技术来用;
最后一方面是算法。其实算法上面有很多可以做的工作,我们现在能做的事情有一些最基本的环境感知、动态规划、行为预测、控制等等,这些方面有大量的工作在学术界和企业界都可以探讨。我们花比较多的时间讲这张图。
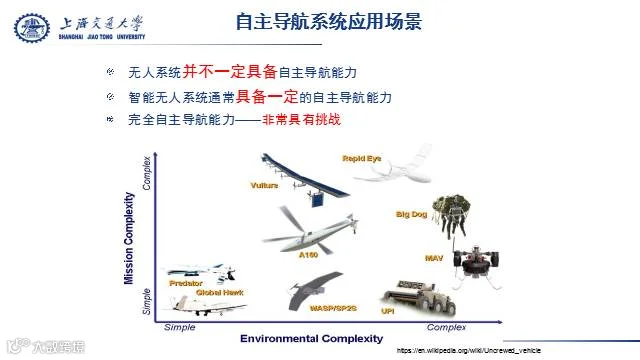
无人系统并不一定都具有自主导航能力,因为我的主题讲自主导航。大家可以想象一下,一家遥控的无人机是不具备自主导航能力的。通常智能无人系统具备一定的自主导航能力,如果我们要实现完全的自主导航那就像刚才一样,我看很多人都不愿意坐无人驾驶的车就是因为觉得还不够可靠。
这里可以看到这是一个无人系统,我们从两个维度去想。第一个是MOM的复杂度,现在有很多的无人机、无人车任务越来越复杂、面临的环境也越来越复杂。在座有很多是做车这一块的,我今天想讲的是MAV,MAV是什么呢?就是小型无人机。你可以看到任务的复杂度和环境的复杂度实际上是比车还更为复杂的。
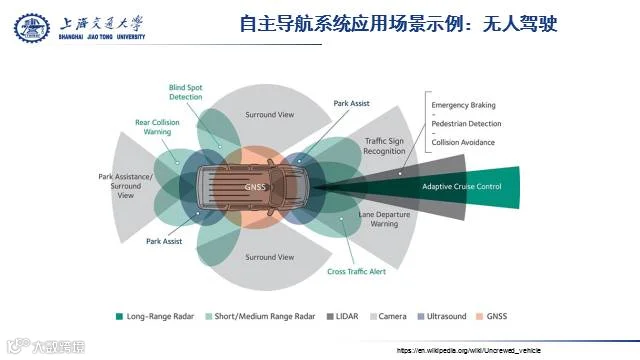
自主导航应用系统大家可以看到这是无人驾驶非常经典的图,大家可能比我都还熟悉。上面集成了各种各样的传感器有Lidar、GNSS、Camera,只有这样一个系统才能保证安全出行。
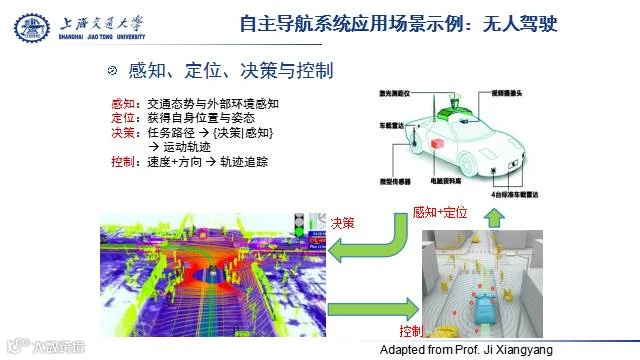
如果有这样一个系统之后,我们在自动驾驶里面涉及到4个方面:感知、定位、决策、控制。作为我们团队来说,核心关注的就是感知和定位,这是我们最关注的内容。

这是我们做的典型系统,这是我们做的SJTUDrone系统,这个传感器不如车上的传感器多,我们在这里集成了9个传感器,包括Lidar、飞控、光流、GNCC、RGB等等这些组成了一个小型无人车,它执行的任务会更加复杂。
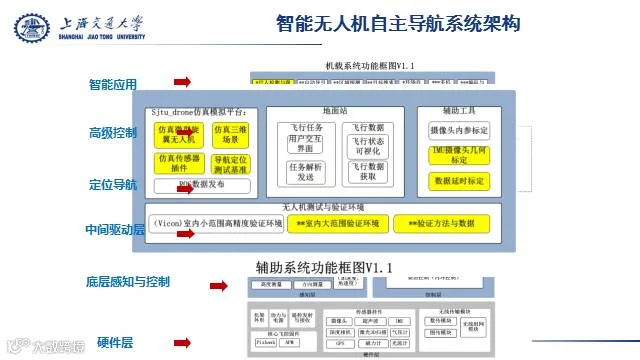
对于这样一个系统怎么样在软件上面实现它呢?下面的是硬件层包括机架、飞控、电源、管理等等,各种各样的传感器和无线传输模块。接下来是感知控制层,我们把这些传感器数据拿上来,然后做一些速度、距离的感知和高度的控制,接下来是驱动层就不说了。
核心我想说两点:导航定位这是无人系统里面必备的一项功能。具有导航定位能力之上可以做一些什么事情呢?就是高级控制,比如悬停、视觉试图、精准起降等等都作为高级控制层。最上面一层是智能应用,也就是说我们有了这样的能力之后可以做各种各样无人机的应用,包括行人跟踪、自动跟随、目标检测、环绕拍摄等等,这些应用可以百花齐放。为了实现这样的愿望我们还有一个辅助系统包括仿真平台等等,我就不细说了。
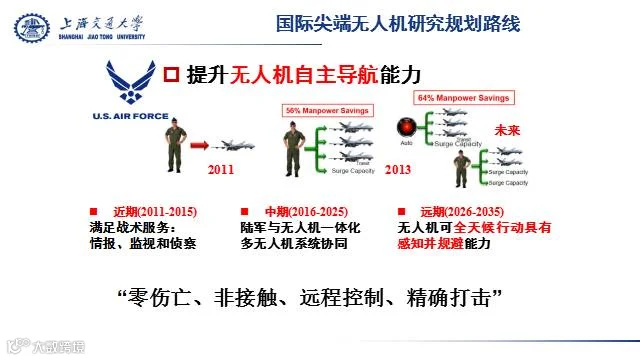
接下来分享一下我们具备自主导航能力和测试环境。这是美国军方做的设计,在近期满足暂时需求的,中期是人机一体,远期是全天候、集群式的概念。我随时想打击什么目标就可以打击什么目标,这是美国在军事上的愿景。

在分级上面分成了10个级别,从复杂的环境感知到机群控制、机群决策,想要做的事情就是利用无人机能够做看战场的能力,具备塑造战场态势的能力,这是在无人机军方的用途。这是美国人的想法。
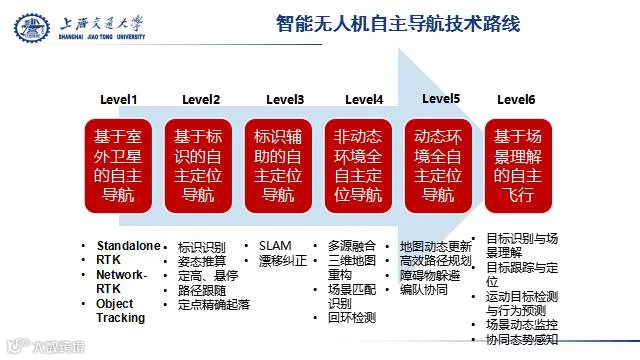
我们从自己的实践把无人机自主导航的能力分成6级,最外面是基于室外卫星导航的,比如单点这些技术可以作为在室外应用的技术;第二个是基于特殊标识的;第三个标识只是做辅助作用的自主导航;第四个是在非动态环境里面的定位导航;第五级就是动态环境,也就是大家所知道的现在封闭环境里面无人驾驶做的比较好,但是开放环境里面外部因素太多。最后一级是基于场景理解能力的飞行。接下来我针对每一级做一点分享。

第一级我们做的是无人机大赛,我们让学生做了自主飞行算法在无人机上面。做的事情就是跟随地面的车沿着赛道跑,谁最快谁就获得胜利。

第二级我们想象未来的仓储,未来的仓储可能是非常大的仓库里面无人机需要精准的在仓库里面进行悬停/起降,这时候没有卫星怎么办呢?利用的是视觉技术。

这也是我们做的比赛,地面上有10个飞机屏无人机必须找到后精准停放。无人机沿着地面的轨迹飞行,同时避开这些障碍,谁最快到达终点谁赢。

这是自主室内外无缝飞行,从室内到室外是一个无缝的对接。我们想想这些无人机系统怎么样做到无缝?从室内到室外去推,这是我们做的一架无人机从室外用无人机的情况到室内用视觉做定位。

这也是一个非常有趣的分享,2016年Google做的技术,他做的什么技术呢?你们可以想一下一辆车在一个环境里面跑一遍,所有车都能跟着他在这个环境里面不会发生迷失,什么道理呢?这辆车在这个环境里面做训练,训练完之后其他车根据你训练的神经网络就能进行定位。
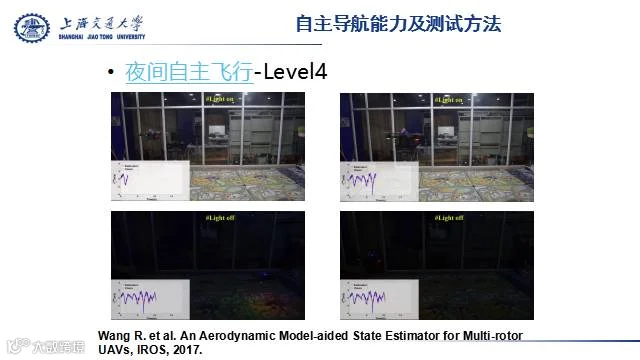
这个技术是夜间自主飞行,目前很多技术是基于视觉。视觉技术大家可以想像在弱光条件甚至在夜间怎么办?我们这里做的是无人机例子。它有什么特性呢?现在无人机想要做悬停、精准飞行的时候强烈依赖于光流计(音),这在很多情况下还算可以,但是在室内像灯一关掉的时候就失效了。怎么解决这个问题呢?我们利用飞机动力学的方法估计无人机的速度。
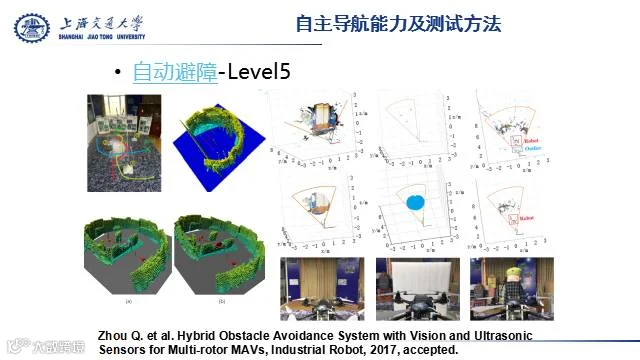
第五级里面有一个自动避障。这其实是无人驾驶里面最基础的技术但在无人机领域有所不同,汽车是在两维模式上运行的,无人机有第三维度这就加大了复杂难度。这是目标识别与场景理解,无人机在飞的过程当中不仅仅能够做到跟踪、自主飞行,同时要理解场景里面的目标,大家请看一下视频。
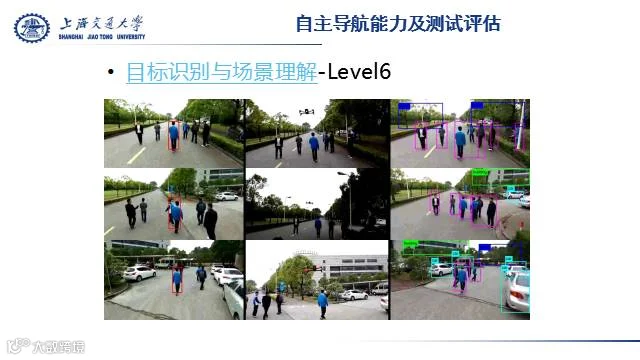
我们用了一个商业无人机,这里有三个场景,第一个是无人机的第一人称视角看到的是蓝色衣服的人,这是我们要跟踪的目标。中间是第三人称拍的无人机怎么样跟踪这些人,其中这群人里面也有穿蓝色衣服的人是干扰。最后一个屏幕显示的是跟踪人的同时可以把场景里面的目标,比如人、车、树、房屋等等全部理解出来。想要说的是未来无人系统是具备多种能力的综合,我想说的是我们这里只用了单目做工作没有用深度,所以难度上会稍微大一些。

最后做一下展望。刚才展示了技术的能力和应用,现在自主导航技术广泛应用在各种各样的无人系统里面,自主导航的能力我们认为在一定程度上解决了无人系统的自主水平。第二个是面向特定任务的自主导航现在已经逐步走向应用,但是要是开放的环境、完全自主平台还是非常具有挑战的。大家可以看到现在的车、无人机一大堆传感器在这里,但是我想要说的是量解决不了质的问题。我们不能说把传感器搁在上面就好了,真正的是把这些传感器有效地利用并且融合在一起这才是关键。
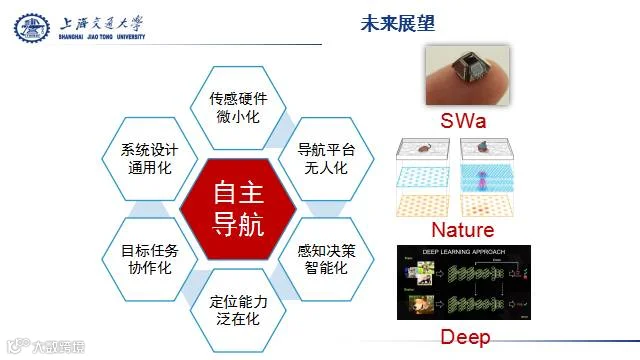
最后展望一下未来。我们认为从我们的角度做自主导航的时候具备这几个方面,传感器微小化、导航平台无人化、决策智能化、定位泛在化、目标结构化、系统设计通用化。三个关键词:SWAP、Nature、Deep。SWaP就是小尺寸、轻、力量比较小。Nature就是我们越来越多仿造生物的特点做一些导航传感器、算法。DeeP就是深度学习会广泛地应用在无人系统里面。
我的分享到此结束,谢谢。

(正文根据速记整理,未经演讲者审阅)