基于FlightSim平台中的VFlight软件和VSSim软件对倒立摆进行控制算法设计与三维视景仿真。
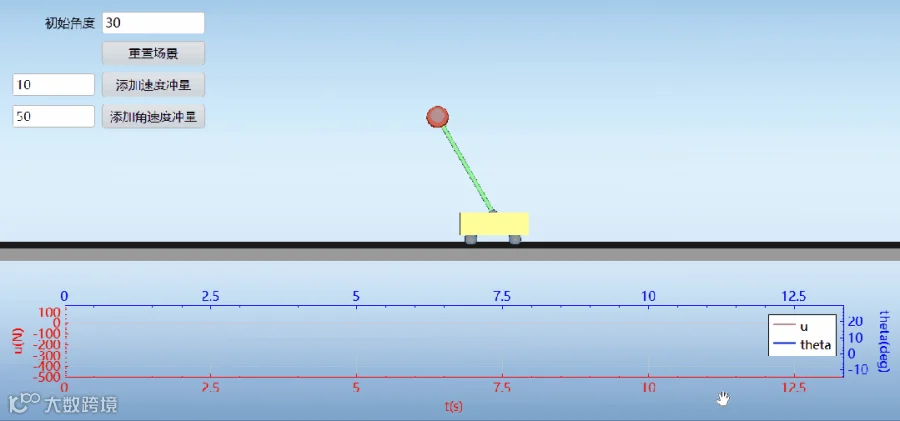
倒立摆是处于倒置不稳定状态、通过人为控制使其处于动态平衡的一种摆,是一个复杂的快速、非线性、多变量、强耦合、开环不稳定系统,是重心在上、支点在下控制问题的抽象表达。
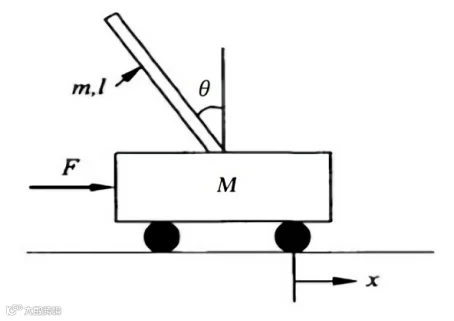
一级倒立摆小车系统如上图所示。系统由沿导轨运动的小车和通过转轴固定在小车上的摆杆组成。
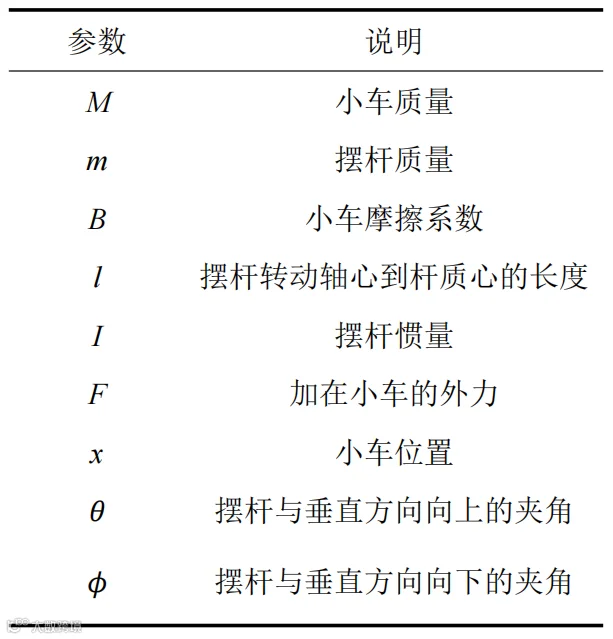
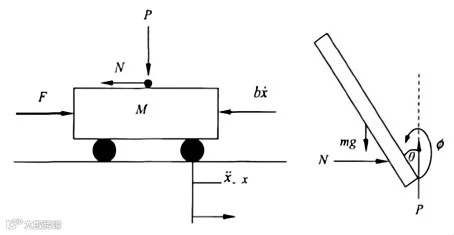
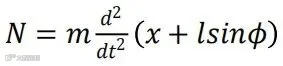
其中,N——小车与摆杆相互作用力的水平方向的分量;
应用牛顿法建立直线一级倒立摆系统的动力学方程过程。根据小车水平方向所受的合力,可得如下方程:
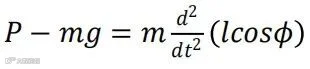
由于 ,可得到倒立摆系统的数学模型为如下方程组:
,可得到倒立摆系统的数学模型为如下方程组:
在VFlight软件中新建倒立摆设计解决方案,添加仿真系统模块。
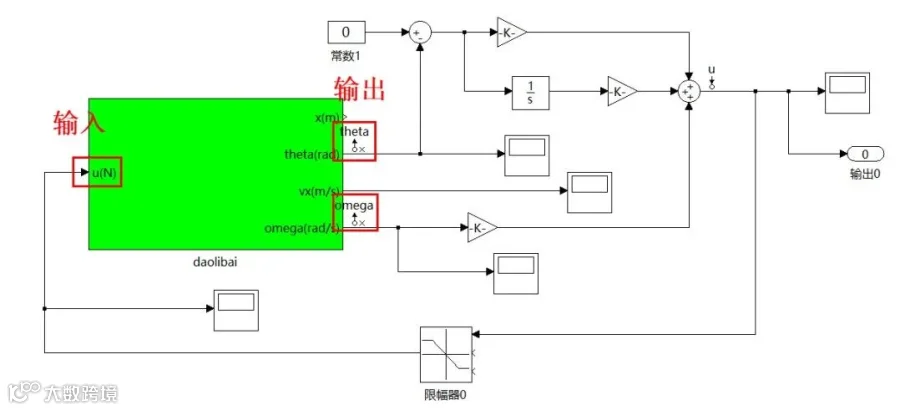
利用拖拽式建模工具搭建倒立摆模型,下图中标绿的模块对应上述倒立摆模型中的核心动力学方程:

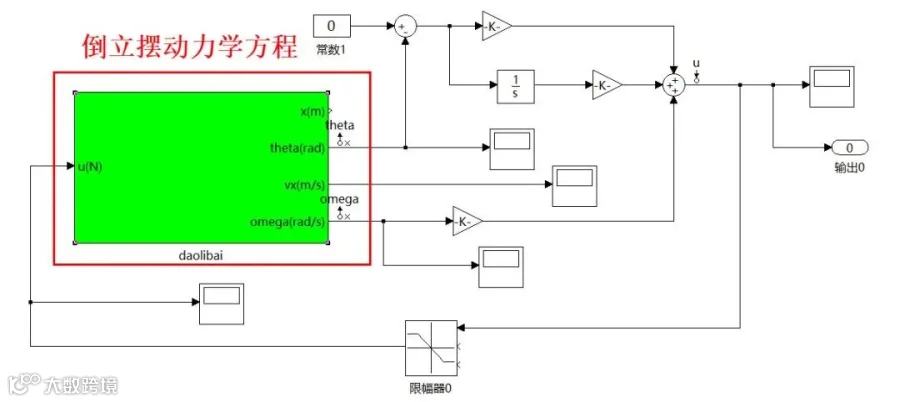
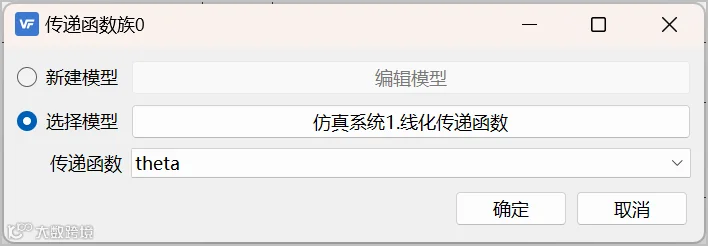
由于倒立摆实际是一个非线性化的模型,为便于控制器的设计,需要对摆杆与垂直向上方向之间的夹角theta进行线化处理。
其中输入项u为对小车施加的外力,输出项theta为垂直方向的夹角,omega为绕质心的角速度。
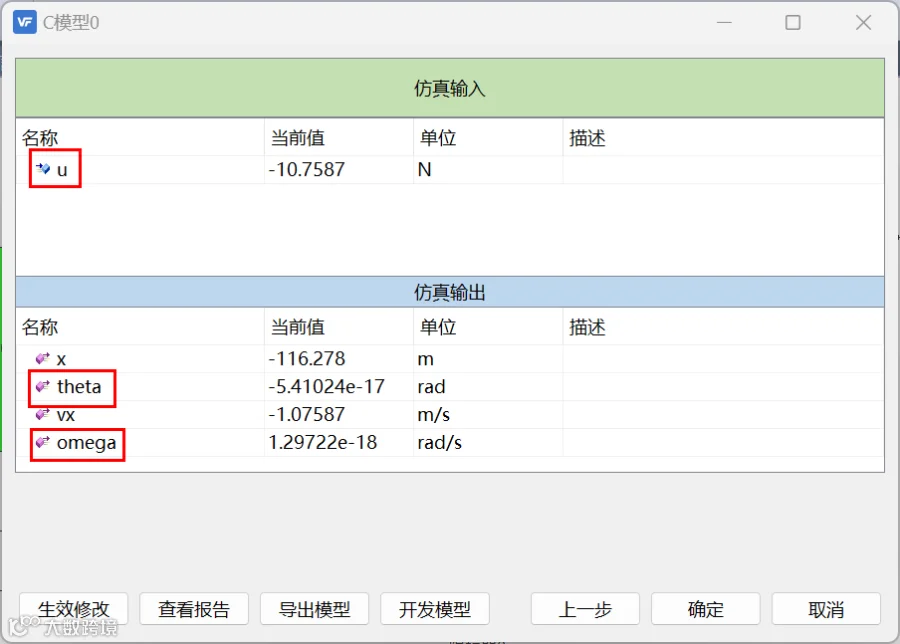
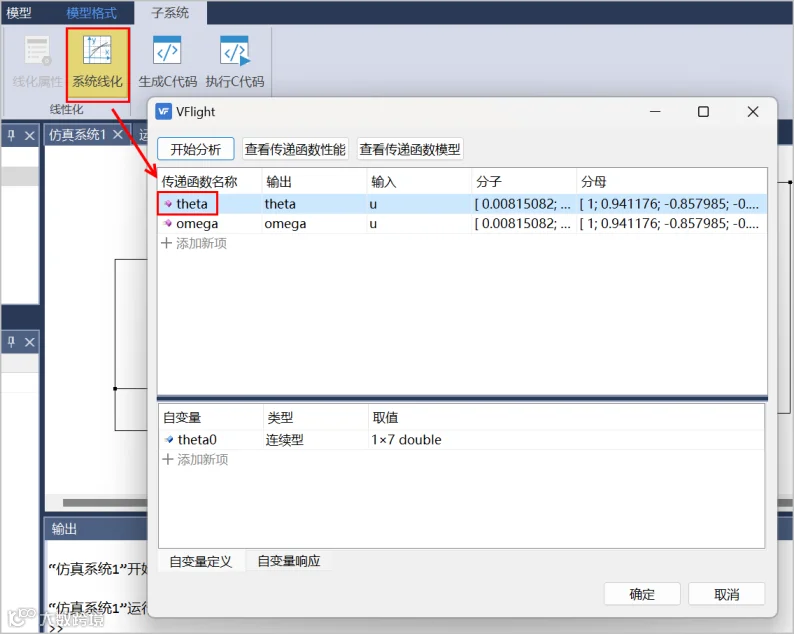
工具栏中的“系统线化”工具,支持在不同角度theta处用数值算法进行线化处理,简化了用户手动线化计算工作量。
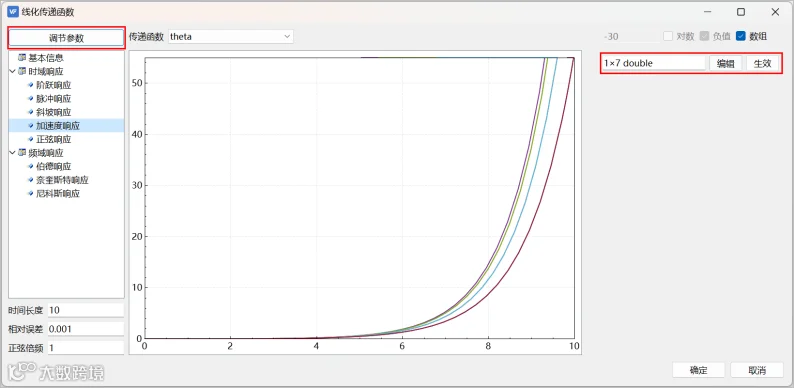
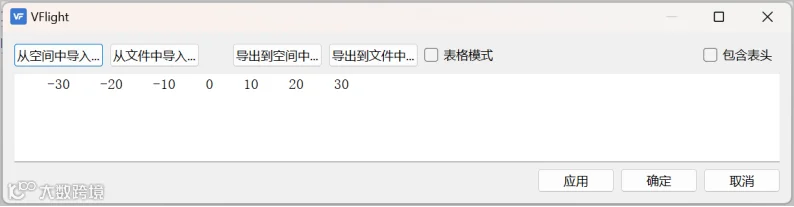
该工具还支持查看并生成多组线化模型。如下图所示,在调参模块中选择数组模式,输入多组theta值并生效查看不同角度下线化模型对比情况。
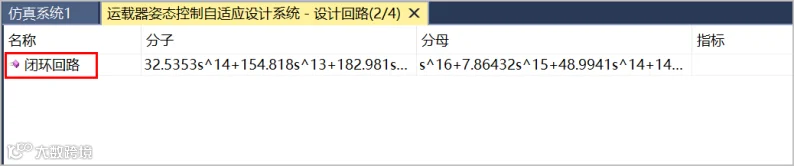
在已新建的倒立摆设计解决方案下添加控制回路设计模块。
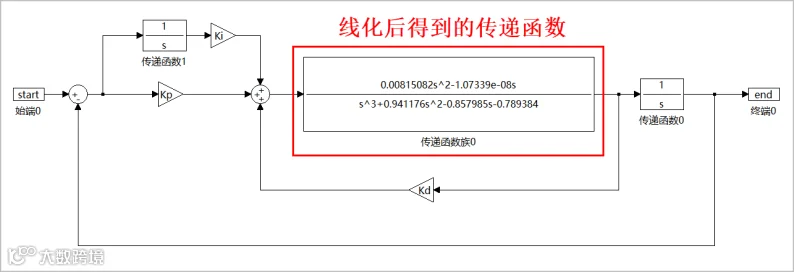
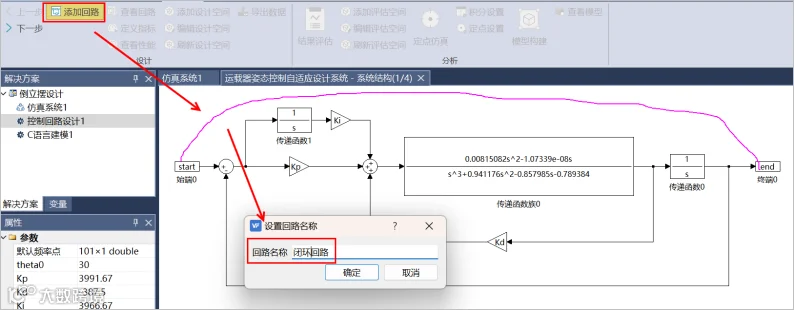
利用拖拽式建模工具搭建控制器模型,导入3.2中线化后的传递函数。
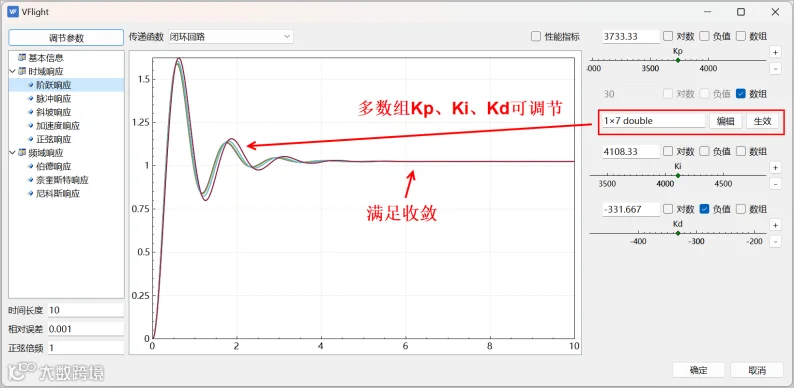
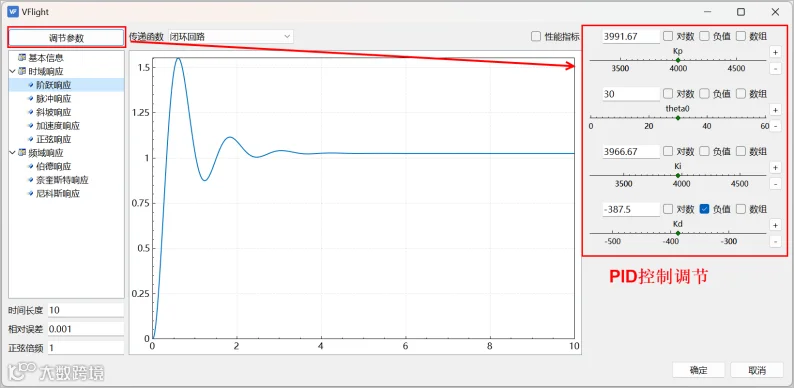
对闭环回路进行PID控制调节,以提高控制器设计的稳定性。软件支持分别对Kp、Ki和Kd参数进行动态可视化调整,保证传递函数收敛即可。
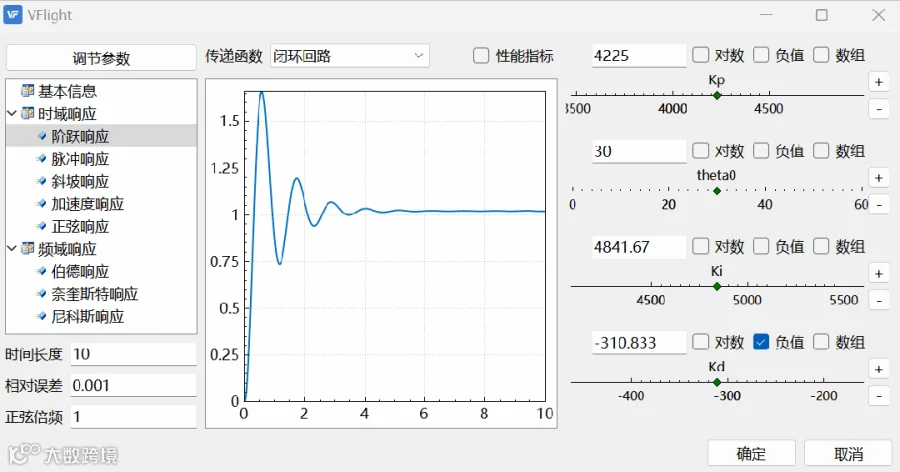
同理仿真系统模块,支持输入多组theta值并生效查看不同角度下PID控制回路收敛对比情况。
将调整后的传递函数模型带回仿真系统中进行仿真验证,得到满足收敛的结果。
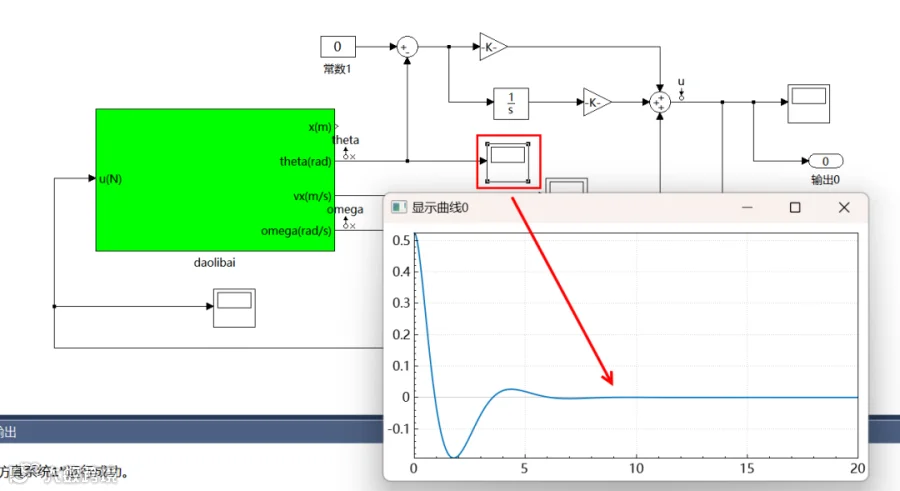
由于倒立摆仿真模型的曲线展示形式不是很直观,进一步可以通过VSSim软件的三维坐标系和三维视听模型等给用户更加直观、立体的展示。下一期将详细介绍如何构建三维仿真场景。
倒立摆控制模型效果展示如下,支持用户输入不同的初始角度、速度和角速度冲量,并在运行过程中添加冲量进行实时仿真模拟。

FlightSim平台面向飞行器设计与仿真方向,历经近二十年的研制已发展成高端装备制造领域Matlab软件的国产化完整替代方案,包含VFlight、VSSim、VPlot、VCLite、VTeamWork等多款软件。平台拥有自主研发的面向对象解释语言(VD语言)、支持C源代码生成的计算引擎、适应多专业建模的软件架构等关键技术,可为飞行器总体优化、轨迹设计、气动分析、控制系统设计、半实物仿真、多飞行器协同仿真等任务提供高效的解决方案。