
点击上方「蓝字」关注我们

导语:
01
十年积淀·颠覆性突破
自2013年起,英弗耐思团队便投身于原创Dynatrack技术的研发。在长达十余年的征程中,团队精心打磨,完成了5代流片的迭代升级,历经多次算法重构,成功攻克功率器件驱动领域长期存在的“开关损耗-EMI”矛盾难题。2024年,英弗耐思核心团队凭借“实时动态分段控制”创新方案,在全国颠覆性技术创新大赛中脱颖而出,斩获优胜奖。这一殊荣不仅是对团队技术创新能力的高度认可,更是标志着英弗耐思的技术成为该赛事中唯一入选的功率器件驱动芯片技术,彰显了其在行业内的领先地位。
同年,英弗耐思针对人形机器人关节伺服系统的高频、高精度、低损耗需求,成功推出太乙6(Taiyi-6)专用驱动芯片。截至目前,该芯片已完成流片验证与内部测试,开关损耗降低30%以上、di/dt抑制超35%,彻底消除功率器件关断时的电压尖峰,与业内主流伺服驱动器相比,功率密度提升超50%。这些卓越性能指标,预示着太乙6(Taiyi-6)将为行业带来全新的变革。目前,太乙6(Taiyi-6)专用驱动芯片已交付头部上市公司应用验证,正式步入产业化冲刺阶段,有望迅速推动行业的发展进程。
02
人形机器人关节/灵巧手关键应用
1、关节配置差异显著:人形机器人拥有20+自由度,机器狗具备12+自由度,它们实现灵巧运动的关键在于多关节间的精准协同,这对驱动技术和控制算法提出了极高要求。
2、形态驱动技术创新:相较于传统工业机器人,可移动机器人受紧凑构型限制,必须将电机、谐波减速器、驱动器等核心组件高度集成于有限的小型圆柱空间内,这成为推动技术创新的关键动力。
3、三重技术挑战亟待攻克:随着组件微型化进程加快,热管理瓶颈、电磁干扰抑制难题以及功率密度平衡问题,成为当前仿生机器人关节模组发展的关键攻关方向。
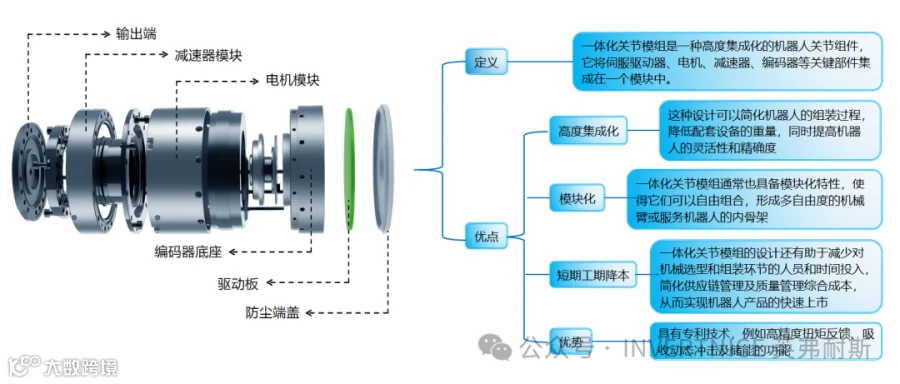
传统门级驱动技术应用于关节模组的驱动模块时,存在EMI抑制能力差、损耗高、发热严重等问题,致使在移动机器人应用中出现体积庞大、爆发力欠佳、发热量大、待机时间短等诸多痛点。英弗耐思研发的驱动芯片则具备低开通损耗、低EMI的显著优势,可助力伺服驱动器实现极高的功率密度,有效减少能量损耗,降低发热程度,进而打造出小体积、高功率密度的伺服驱动模块,完美契合当前人形机器人的严苛需求。
03
技术革新:动态分段控制,重新定义驱动边界

太乙6技术核心优势
1、多段式电流控制技术

04
技术细节:定义行业新标杆
性能实测:数据见证颠覆
关键指标对比(@25℃,VCC=10V)
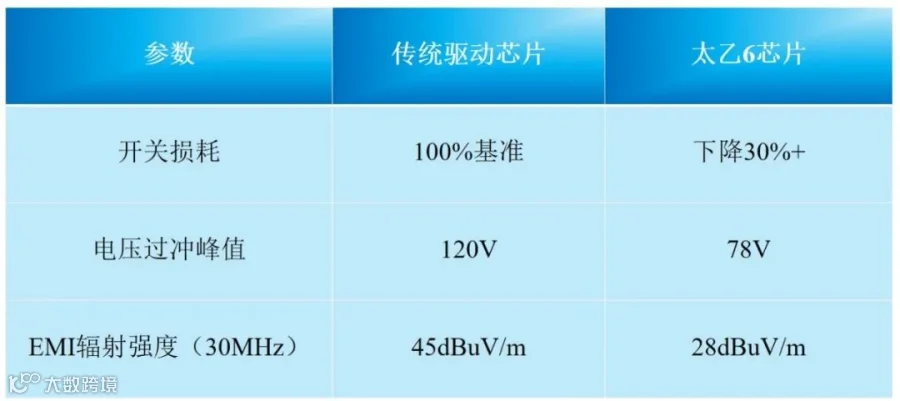
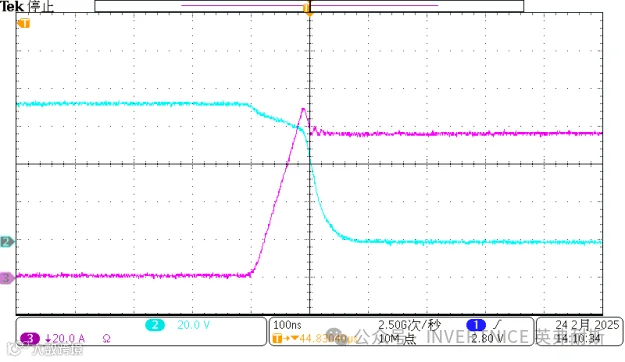
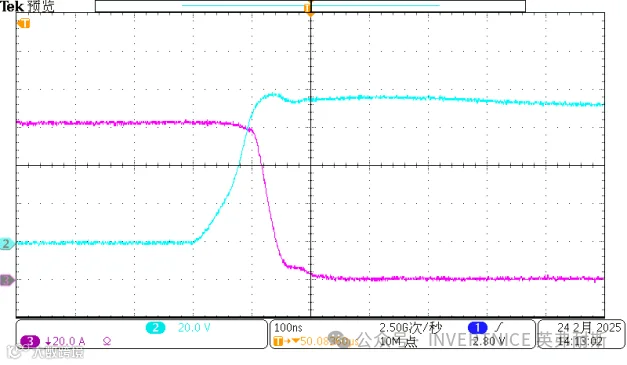
从实际测试表现来看,太乙6专用驱动芯片展现出卓越性能:
图1:开启过程波形,相同电流尖峰情况下,使用传统驱动芯片开通损耗为451uJ,使用太乙6驱动芯片开通损耗为316uJ,开通损耗降低了30%;
结语:
