
1.国内唯一自研驱动芯片:Dynatrack的“降耗革命”
开关损耗降低30%以上:通过智能驱动芯片优化拓扑结构,显著减少能量损失,提升系统能效;
功率密度提升50%:突破传统体积限制,适配高集成化设备,助力设备小型化升级;
EMI性能全面优化:di/dt抑制超35%,大幅减少电压尖峰,满足军工、医疗等严苛场景的电磁兼容需求。
2.国际领先的运动控制算法
一键自整定:无需人工调试,5分钟完成参数自适应匹配,降低90%调试时间;
多场景智能切换:针对半导体加工、手术机器人等不同场景,算法自动优化响应曲线,控制精度达±0.001mm,响应速度提升40%。
3.100%国产化供应链,筑牢安全底座
从MCU到功率芯片,核心元器件全面实现国产替代,彻底摆脱“卡脖子”风险,保障高端装备产业链自主可控。

在半导体、深海装备、工业和特种机器人等对精度、效率、稳定性要求极高的领域,传统伺服驱动方案普遍面临「体积与性能难以兼得」「发热和EMI问题严重」「复杂工况可靠性不足」三大核心痛点。英弗耐思通过「高密度硬件设计+智能化控制算法」的深度融合,为这些「卡脖子」场景提供了更适配的国产化解决方案:
1.半导体制造:让精密设备「小而准」
行业痛点:
晶圆搬运、检测等设备内部空间极为紧凑,传统驱动器体积大、重量高,常因布局困难导致机械结构妥协,甚至影响运动精度;
长时间高频次运行下,普通驱动器散热效率不足,产生的热量易引发机械部件热变形,导致纳米级精度控制失效;
电磁兼容性差的驱动方案会干扰高精度传感器信号,造成测量数据波动,间接影响晶圆良率。
英弗耐思解决方案:
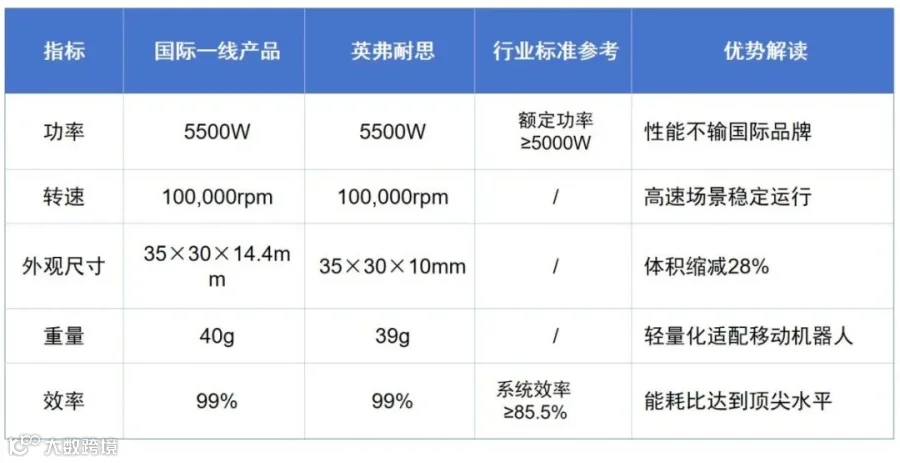
紧凑化设计突破空间限制:通过芯片级集成技术与高密度功率模块,对标国际一线产品,在同等功率下将驱动器体积缩小28%以上,完美适配半导体设备的微型化精密机械结构;
低损耗散热技术稳定精度:驱动芯片减少开关损耗,从源头上降低发热,智能功率分配算法,显著降低运行温升,从源头减少热变形对精度的影响;
电磁兼容强化设计:驱动芯片智能控制,压低开通和关断时尖峰电压,减少电磁干扰源头,为传感器提供纯净的信号环境,保障纳米级测量数据的稳定性。
行业痛点:
深海高压(>60MPa)、低温(0~4℃)及暗流扰动冲击环境下,普通驱动器频繁触发过载保护,导致关键任务中断(如水下机械臂关节失控);
高电压可靠性挑战,常规深海机器人使用600VDC以上高压供电,常规驱动器电路设计无法承受电压瞬变冲击,导致过压保护频繁触发;
CAN总线在长距离传输中易受电磁干扰,造成指令丢包或延时(如机械手动作延迟>200ms);
多关节协同作业(如机械臂+推进器+云台)依赖外部控制器,系统层级冗余导致实时性下降,影响采样精度。
英弗耐思解决方案:
强化过载保护设计:驱动芯片能有效压低尖峰,增加过载能力,针对极端工况优化硬件电路与软件逻辑,在瞬时高负荷下仍能稳定运行,减少运动过程停机风险,保障高速生产的连续性,同时耐温设计兼容-40℃~+85℃,增强密封材料耐冲击设计,不惧深海暗流扰动。
低压电磁供电:无线供电无物理接口,有效降低机器故障率(传统方案故障率62%),避免电磁干扰导致传感器误触发;
电磁干扰全面优化:驱动芯片di/dt抑制超35%,大幅减少电压尖峰,有效降低电磁干扰,保障水下操作精准推进;
集成化多轴协同能力:单驱动器支持多轴同步控制,无需额外扩展模块,简化系统架构的同时提升控制一致性,降低设备整体成本与复杂度。
行业痛点:
协作机器人对驱动器重量、体积要求严苛,传统方案因功率密度低,导致机器人自重过大,灵活性与负载能力难以平衡;
精密装配、曲面加工等场景需要极高的轨迹精度,普通驱动器的运动控制算法精度不足,易造成部件损伤或装配偏差;
移动机器人在复杂地形运行时,传统驱动方案适应能力差,常出现动力中断或定位偏移,影响生产物流效率。
英弗耐思解决方案:
高功率密度轻量化设计:通过自研驱动芯片可以驱动功率密度更大的器件,同时保证可靠性,在更小体积内实现更强动力输出,助力协作机器人减轻自重、提升负载能力,满足人机共融的灵活作业需求;
高精度轨迹控制算法:结合先进运动规划与实时补偿技术,显著提升轨迹平滑度与定位精度,确保精密操作中的部件安全与装配质量;
复杂工况适应技术:针对不同地形与负载状态动态调整控制策略,增强机器人在斜坡、凹凸路面等场景的通过能力与稳定性,保障柔性生产的高效运行。
英弗耐思智能伺服驱动的核心价值,在于跳出传统「参数对标」思维,以「自研芯片+场景化创新」双引擎重构高端制造动力逻辑:
1.强大的自研驱动芯片:自研Dynatrack智能驱动芯片通过自适应多段式控制技术动态调节驱动电流,使开关损耗降低30%以上、di/dt抑制超35%,进而彻底消除功率器件关断时的电压尖峰,真正成为伺服控制器的「智能心脏」;
2.密度优先的硬件创新:依托自研芯片的高度集成能力,在紧凑空间内实现功率密度突破,解决高端装备「体积与性能失衡」的核心矛盾,为半导体设备微型化、机器人轻量化提供底层支撑;
3.自主可控的供应链体系:构建从核心芯片设计到软件系统开发的全自主技术栈,彻底摆脱对进口芯片和工具链的依赖,在全球产业链重构期为客户提供稳定可靠的技术保障。
当前,英弗耐思高功率密度伺服驱动已完成实验室技术验证,在体积、能效、控制精度等关键指标上达到国际一线水平。通过与国内头部装备制造厂商的联合测试,正针对半导体晶圆搬运、锂电高速卷绕、协作机器人精密操作等场景进行定向优化,目标在量产版本中实现「小体积×高可靠×强适配」的极致平衡——不仅满足高端装备的即时性能需求,更通过持续的场景化算法迭代,为设备提供全生命周期的技术升级能力。
英弗耐思智能伺服驱动器的成功研发,标志着我国在高端伺服领域实现了从“跟跑”到“并跑”的跨越。这种「从场景中来,到场景中去」的研发逻辑,标志着我国高端伺服技术从「跟跑国际标准」迈向「定义行业需求」。随着自研芯片产能的逐步释放与国产化供应链的成熟,英弗耐思将加速推动「中国芯」动力在半导体、新能源、工业机器人等战略领域的规模化应用,助力国产高端装备突破「卡脖子」瓶颈,在全球制造竞争中构建「技术适配+供应安全」的双重优势,为「中国智造」的崛起注入自主可控的核心动力。