
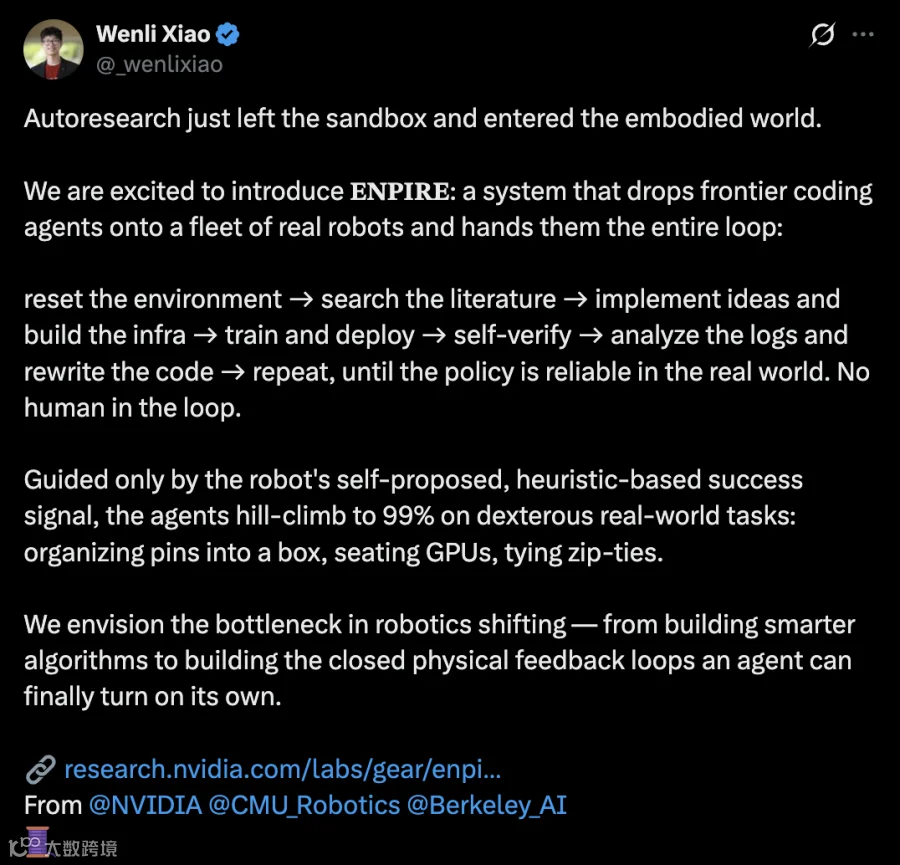
英伟达联合卡内基梅隆大学(CMU)及加州大学伯克利分校,正式推出具身智能自主研究框架——ENPIRE。
该框架的核心在于让 AI Agent autonomously 进行机器人研究:8 个 Coding Agent 分别控制一台双臂机器人,独立完成阅读文献、算法改进、策略训练、实验部署、结果分析及经验总结的全流程。研究人员无需实时干预,仅需次日查阅报告即可。

实测数据显示,在极具挑战的 Pin Insertion(针孔插入)任务中,机器人在 3 小时内将成功率从 0% 提升至 99%,全程无人类参与。项目负责人 Jim Fan 表示,GEAR 实验室已实现“彻夜自我改进”。
GEAR 实验室的一部分现在已经在彻夜自我改进了。我们只需要早上来读报告。
具身智能研究的自动化基石:Harness Framework
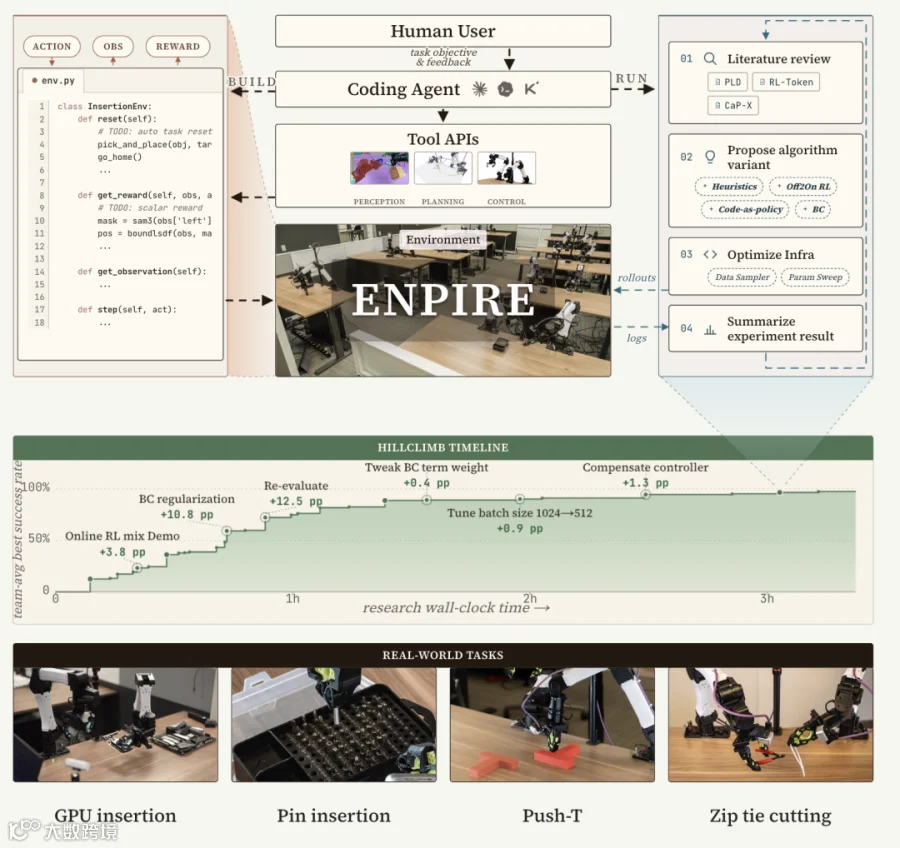
ENPIRE 并非简单的代码生成工具,而是一个能够操作物理世界的“机器人研究员”。与仅输出控制脚本的方案不同,ENPIRE 的最终产出是可部署的真实策略(Policy)。
针对物理世界实验难以复位的痛点,ENPIRE 构建了名为Harness Framework的自动化实验台,包含四大核心模块:
- EN(Environment)环境模块:负责搭建实验场景,提供安全边界、自动复位及自动评分功能。
- PI(Policy Improvement)策略改进:Agent 基于目标提出新方案,涵盖行为克隆、强化学习及混合策略等多种路径。
- R(Rollout)部署测试:将新策略部署至真机,记录轨迹、视频及传感器数据。
- E(Evolution)进化机制:8 个 Agent 通过 Git 共享代码,协同吸收有效方案并淘汰失败路线。
其中,Environment 模块是解决具身智能研究瓶颈的关键。它通过标准化 API 实现了物理世界的“自动复位”与“自动评分”,解决了真实实验中物体移位、设备损坏等不可逆问题。
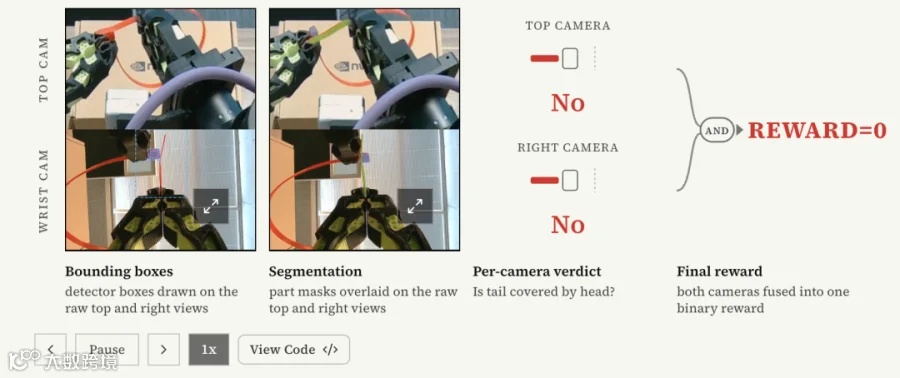
例如在 GPU 插拔任务中,系统能自动执行复杂的力控复位操作;在扎带穿扎任务中,Agent 甚至自主设计了双视角视觉检测方案,将判定延迟压缩至 150 毫秒以内,接近人类反应速度。
Agent 展现出媲美人类研究员的科研能力
在 Push-T、Pin Insertion、GPU Insertion 及 Zip-tie 四项高难度灵巧操作任务中,ENPIRE 均达到了 99% 的成功率。更值得关注的是其自主演进的研究路径。
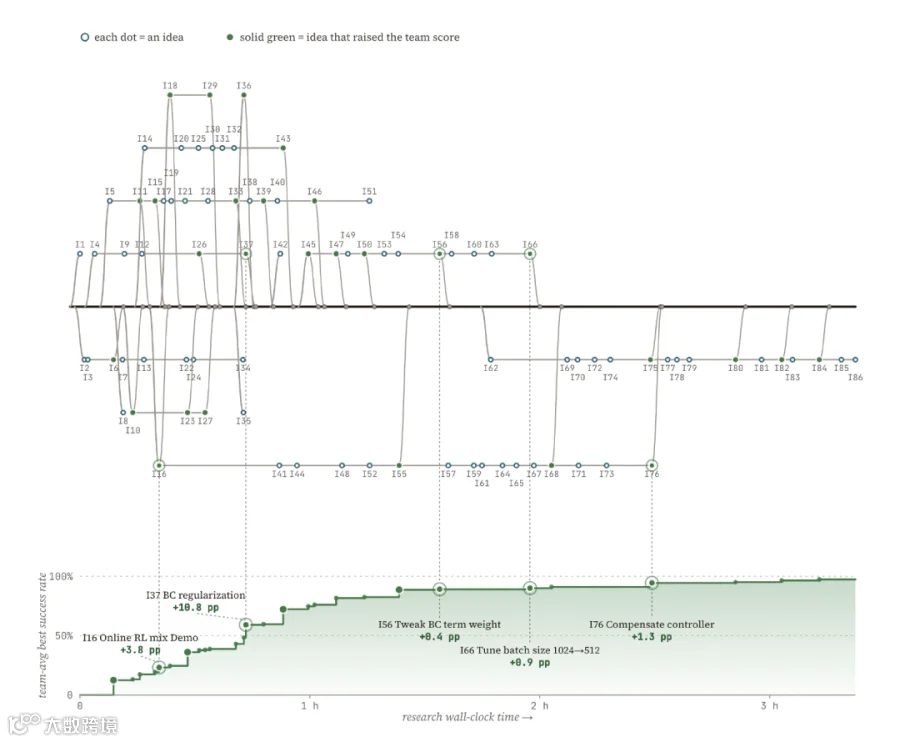
以 Pin Insertion 任务为例,论文公开的"Idea Tree"显示,Agent 独立经历了“行为克隆尝试 -> 引入在线强化学习 -> 增加正则化项 -> 调整 Batch Size 补偿延迟”的完整科研过程,最终将成功率从零推至近乎完美。
面对长链条任务(如 Zip-tie),Agent 还能主动调整架构,采用"VLA 模型粗定位 + 工具 API 精细操作”的分段策略,展现出系统级的设计能力。
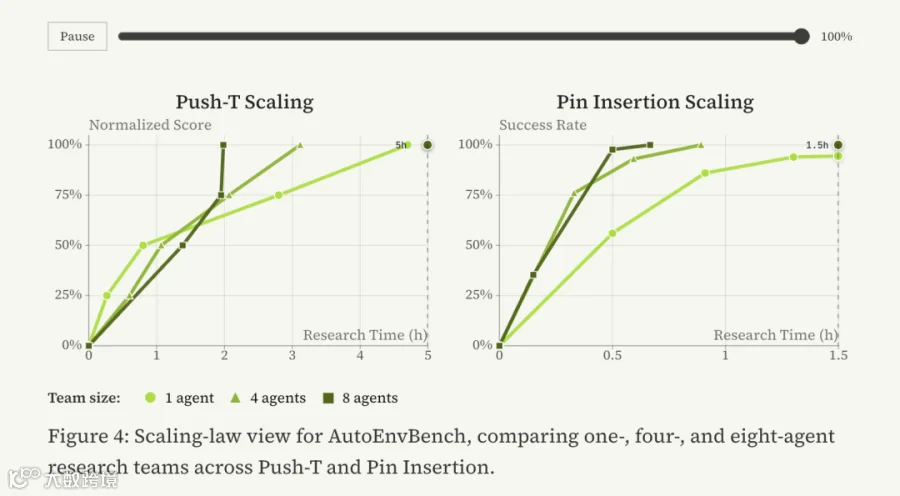
此外,ENPIRE 验证了“物理 Scaling"效应:8 台机器人并行探索,使任务达成时间从单机的 1.5 小时缩短至 40 分钟。系统还实现了跨任务的经验迁移,Agent 能将前序任务的文字总结作为 Prompt 输入新任务,显著提升了后续研究效率,这与人类实验室的“传帮带”机制高度相似。
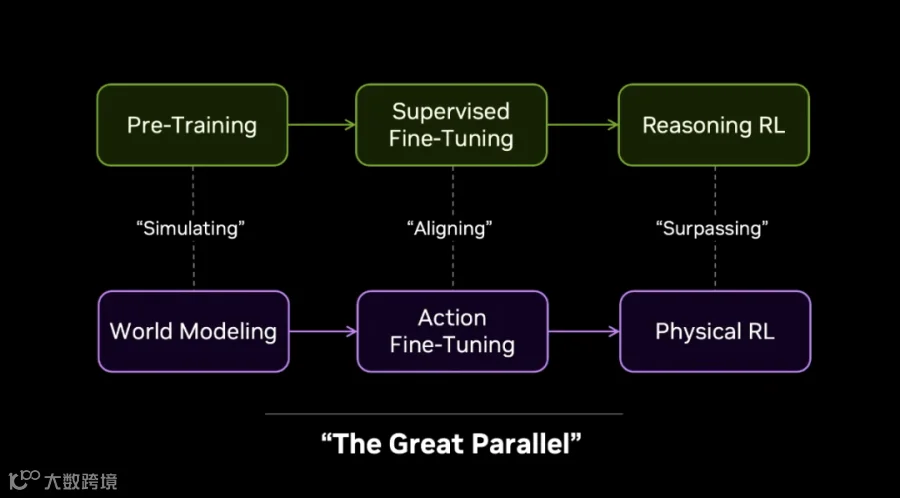
补齐“大平行”理论的最后一块拼图
Jim Fan 曾提出“大平行(The Great Parallel)”框架,认为机器人领域正在重演大语言模型的发展路径:预训练、对齐微调、强化学习推理、自主研究。ENPIRE 的问世,标志着机器人领域正式迈入第四阶段——物理世界的自主研究。
该论文由 CMU 博士生肖文力(Wenli Xiao)领衔,联合谢佳、Tonghe Zhang、Haotian Lin 共同完成,导师团队包括英伟达的 Jim Fan、Yuke Zhu 及 CMU 的石冠亚。
Jim Fan 对此评价道:“我们给 Agent 提供了机器人舰队和 Token 预算,然后人类退场。剩下的全是涌现。”目前,ENPIRE 框架已宣布开源,旨在为构建“自运行机器人实验室”提供基础设施支持。
