
SLAM是什么?
【建图问题】 需要有地图才能定位
【定位问题】 需要有定位才能建图
【SLAM】
定位和地图都不需要,能一边定 位一边建图
SLAM并不仅仅指代某种特定算法
而是一种问题的总称,集合定位、建图、导航、环境探索、高精建模、ORB-SLAM、LOAM、多传感器融合、语义地图等等。其应用十分广泛,涵盖航天、军事、特种作业、工业生产等等,典型应用包括军事机器人、特种作业机器人、农业领域机器人等等。

底盘机器人SLAM的应用
需求推动发展,机器人最重要的部分就属底盘,它兼具高精度移动和导航技术的基础模块,因此机器人底盘也成为一个细分领域,国内机器人厂家争相布局。
优秀的机器人底盘可以实现高精度导航,自动避障,自主寻找最优路线。商用服务机器人底盘主要由激光雷达传感器、深度摄像头、超声波及防跌落传感器等核心硬件组成。

而其核心技术市场上主要有两种:
一种是结合激光SLAM自主定位技术的激光雷达底盘,另一种是搭载视觉SLAM模块化定位导航系统的底盘。
优势对比:
第一、激光SLAM比视觉SLAM起步早,在理论、技术和产品落地上都相对成熟。
第二、激光SLAM成本较高,而视觉SLAM主要是通过摄像头来采集数据信息,所以成本低很多。
第三、激光SLAM构建地图精准度较高。激光SLAM精度可达2cm左右,而视觉SLAM约3cm。
第四、激光SLAM主要用在室内,而视觉SLAM在室内外都可以工作。
SLAM主要技术路线
SLAM 系统最初的设想是为机器人提供在未知环境中探索时的定位和导航能力,其核心在于实时定位。以定位为目的,需要建立周围环境的路标点地图,进而确定机器人相对路标点的位置,这里的路标点地图即稀疏地图,地图服务于定位。
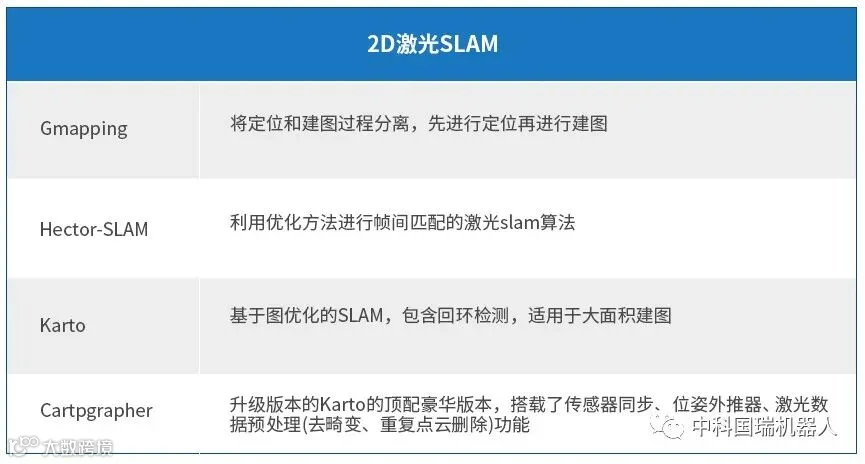
激光SLAM(单线、多线)主流方案

视觉SLAM(单目、双目、RGB-D)主流方案
以视觉传感器作为主要感知方式的SLAM称为视觉SLAM 。按照建图稀疏程度来分,视觉SLAM技术可以分为:
1.稀疏SLAM
2.半稠密SLAM
3.稠密SLAM。

相比于激光雷达,视觉SLAM传感器的相机更加便宜、轻便、且随处可得,另外图像能提供更加丰富的信息,特征区分度更高。
视觉SLAM使用的传感器目前主要有单目相机、双目相机、RGB-D相机三种。

激光SLAM是目前比较成熟的定位导航方案,但也是因为体积大,加上机器人底盘还要结合视觉、超声波、红外传感器等模块,在安装便利性上较差。采用多传感器融合技术,激光SLAM和视觉SLAM融合未来或许会成为趋势!