大银产品
為何要使用線性馬達,與滾珠螺桿比起來有何差異?
線性馬達採用直接驅動的方式,可以減少定位系統的零件數目,降低機構複雜度,提高可靠度。
線性馬達的速度比滾珠螺桿快,而且當行程越長的時候,線性馬達越有利,因為線性馬達的定子採用模組式設計,可以無限連接模組,所以基本上行程不受限制。滾珠螺桿行程長則會有下垂的問題。
線性馬達因為直接驅動所以沒有背隙的問題。
哪種形式較適合我的應用呢?
大推力,點對點運動,基本上推薦LMS系列,要更大推力,則可以選用LMF系列,但是機構空間會需求比較多。
零件重量輕,需要特別平滑的掃描運動,電子業、半導體業,可以使用LMC系列,體積小、加減速高。當然點對點運動也是絕對沒有問題的。
我們提供上述不同型式的標準化的定位平台,如果您對於單獨的線性馬達元件、動子、定子已經有應用經驗,我們也可以單出元件,我們也會提供組裝的注意事項,光學尺搭配的方式及機構的設計建議供您參考。
對於特殊應用,我們也可以提供例如空氣軸承的特製平台,達到奈米級的定位控制。
直線度大約多少呢?
以鋁材質基座為例,每300mm正負0.01mm
垂直度可達多少呢?
正負5 arc sec
精度呢?
一般而言精度是依行程不同而不同,隨著行程加大而變大,基本上可以按照下述公式計算:(30/1000) x STROKE(mm) + 5 MICRON
雖然精度會隨著長度變長而變大,但是如果可以利用溫控讓精度延著行程的變化不發生很大的變動,一般而言可以利用補償的方式來進一步提升精度,我們也可以提供這方面的方法供客戶自行參考以加強精度性能。
重現精度呢?
一般大約可以在正負1 micron以內。
解析度多少?
可以搭配各種位置回饋系統,1micron的數位式光學尺最為普遍。當然也可以選擇例如0.1micron的數位光學尺,但要注意運動控制卡是否可以支援高速運動,如果想兼顧高解析和高速度運動的話,可以選擇類比式的弦波光學尺。以40micron的類比尺而言,搭配適當的驅動器或控制器解析到數十個奈米都沒有問題。
有誰在使用?
點膠機、雷射LCD修補機、雷射切割機、水刀應用、TFT面板檢測機、PCB雷射檢測、蛇腹壽命測試機、PCB板光學檢測機、PCB鑽孔機、安全帶加速度測試機、晶圓搬送手臂、光罩檢查設備、LCD裸片檢查機、CCD鏡頭上件機。
實際已經使用在台灣、日本、韓國、中國、德國、奧地利、瑞士、泰國等國家。
速度最快多快? 最慢多慢?
高速運動除了受行程的影響之外,負載、馬達推力所造成的加減速都是關鍵。實際上以測試過的經驗來講,最快跑到4m/s並沒有問題。但是必須考慮滑軌,跑線槽等週邊的搭配。
低速運動基本上並沒有特殊限制,只要運動控制器可以支援,基本上每秒要跑數個微米都應該沒有問題。
速度穩定性如何?
通常會要求速度穩定性的應用會以速度漣波來衡量好壞,這個性能主要依存於馬達本身的特性,例如頓力,還有滑軌以及纜線還有跑線槽的特性。LMC系列的馬達特別適合於這樣的需求。
以線性滑軌組成的LMC平台而言,在速度100-400mm/s之下,一般可以達到1.5%以內。
如果需要更好的穩定性,則必須採用LMC搭配空氣軸承,在60-150mm/s的速度下,可以達到1%以內。
線性馬達在控制上與旋轉型的AC伺服馬達有什麼不同?
基本上控制的方式大同小異,例如採用脈波控制的話,運動控制卡依然是送脈波到驅動器去,此外如果是速度模式或電流模式(或稱轉矩或力量模式)也一樣由運動控制器送出電壓到驅動器。不同的是,控制線性馬達時,不須再有繁複的轉換計算,減速比等計算,只要直接以運動方向的距離來思考,計算即可,設定也是直接用運動方向的加速度及速度即可。
發熱問題?
任何馬達皆有發熱問題伴隨,在設計階段就要考慮這個問題,發熱主要來自加減速度,如果加減速度所需的電流都維持在馬達及驅動器的連續電流之下,則不會有嚴重的發熱問題。
如果在加減速的過程中,有短暫的打大電流的需求,則必須在作運動規劃的階段就考慮等效推力,視實際需求,加入暫停運動的時間。
另外如果馬達持續推擠工作物的電流大於上述的連續電流,也要注意過熱問題。
一般而言,LMS馬達的構造有利於散熱,而LMC馬達的線圈比較沒有足夠的散熱空間,所以在設計運動系統時,必須考慮馬達結構的散熱特性。
可以加水冷嗎?
LMSC、LMF型馬達可以加。有關熱的設計,請提供負載,運動速度,加速度,休息時間等資料給我們,我們可以提供更詳細的計算,以完成最佳的系統設計。
真空中可以使用嗎?
我們的LMC系列馬達具有實際搭配真空艙達2.4x10-5 Torr的實績,並經過客戶實際cycle run 24小時以上的測試,因為使用的材質特殊,有需求請與我們聯絡。
潔淨室可以使用嗎?使用的環境如何?
一般而言潔淨室等級1000都沒有問題,如果有更高的需求,請洽本公司。至於一般的使用環境,必須沒有油污、沒有水氣、無嚴重粉塵的環境。如果有特殊的環境需求,請洽本公司。
壽命多長?
線性馬達本身主要由線圈及永久磁鐵構成。所以正常使用下並無壽命問題,但是搭配的線性滑軌、纜線、跑線槽等等卻都是消耗性的,所以壽命是受限於這些零件及材料。一般正常使用而言,五年應該沒有問題。
馬達是幾瓦?
由於線性馬達是用線性運動方向的力量來計算的,所以選用的時候是以加速度、速度、推力來計算的,並不適合用瓦數來選用。以功率來講,目前我們的馬達都在2kW以下。
可載多重?
馬達只是提供定位系統中一個力量的來源而已,搭載重量主要依存於加速度的需求,越大的質量會對滑軌或空氣軸承造成更大的負荷,對滑軌而言也會加大摩擦力,對於這個問題並無法有統一的答案,一般而言對LMS馬達來講,不要超過150kg,對LMC馬達而言,不要超過30kg的設計比較合理。當然如果對加減速度不特別要求的話,只要軸承可以承受的範圍內,加大負載也不是完全不可以的。端視使用者的需求。
線性馬達可否當Z軸使用,或者斜放使用?
可以,但必須考慮負載大小、傾斜角度,並視需求提供特殊的配重的機構,以及數位霍爾元件來搭配。
推力有多少?
LMS的瞬間推力可高達2850N;LMF的瞬間推力可高達7328N;LMC的瞬間推力可高達2736N;LMT的瞬間推力可高達736N。
價格與滾珠螺桿相比如何?
目前線性馬達的價格比滾珠螺桿稍貴。
行程可以多長?
基本上不受限制,因為採用接的方式,實際上如果是整組定位平台的話,有4米長的實績。
需不需要軸卡?
依照搭配的驅動器,可以搭也可以不搭,如果採用大銀微系統的D系列驅動器也可以有獨立的運動功能,只要用簡單的I/O就可以下達預設的運動指令,可以不用搭配軸卡。
可以採用絕對式光學尺嗎?
可以,但是搭配的驅動器和控制器要特別選擇。
安定時間多快?
由於安定時間牽涉的原因非常多,包括負載的大小、負載的姿勢、增益的調整、整定框的大小、行程的長短等等,通常都必須各案討論。
不加光學尺可以嗎?
由於我們提供的線性伺服馬達都屬於高精度定位用途,結構上一定需要位置回饋系統來提供整體控制上的換相以及定位精度的目的,因此一般都需要搭配光學尺才可以達到功能需求。如果精度要求不是很高,也可以選擇搭配磁性尺。請與我們聯絡。
甚麼是Duty Cycle (額定運轉率)?對致動器會產生什麼影響?
額定運轉率( Duty Cycle) =連續運轉時間/連續運轉時間+休息時間
例: Duty Cycle = 10% = [ 6min / (6min+54min) ] *100%
有Duty Cycle超過10%時,致動器壽命會相對下降,Duty Cycle太高時致動器會加速損壞
甚麼是Holding Force(自鎖力)?與致動器選用有關嗎?
自鎖力:致動器於運動行程中停止時重物不會往下滑動的力。
有對重物直接受力於致動器時有關(垂直方向),重物無受力於致動器水平移動時無關。
致動器超過額定負載時,可以使用嗎?
不可以,致動器可能會不作動,或提早損壞。
同時使2支或多支致動器,可達到同步功能嗎?
標準品不可以,僅能同動不能同步,因為馬達的轉速(RPM)不夠精確。
但是可選用具位置回饋的致動器(LAH1,LAS-3)來達到同步的功能。
HIWIN的LAK2及LAK4控制器可同時驅動兩支致動器嗎?
可以,但是必須修改控制器或手控開關(Keypad)的線路而且兩支致動器的負載(Load)必須減半。
使用HIWIN各TYPE致動器時如何選用控制器?
LAI,LAM系列致動器無加裝磁簧開關者,選用LAK控制器。
LAI,LAM系列致動器有加裝磁簧開關者,選用LAK2控制器。
LAS,LAF系列致動器,選用LAK2控制器。
LAH系列致動器,選用LAK4控制器。
LAM及LAS用控制器,可交換使用嗎?
不可以,因為控制器內部線路控制不一樣。
電線(+)(-)極性輸入錯誤,對致動器會有影響嗎?
會,因為HIWIN致動器是使用DC馬達可能會產生下列影響。
致動器伸出及縮回方向錯誤。
如加裝磁簧開關,磁簧開關會失效或導致致動器結構損壞。
致動器行程靠甚麼控制?
依各Type不同有三種控制方式:(1)內部極限開關(2)外部極限開關(3)過電流控制。
HIWIN的致動器是使用何種極限開關?
LAI,LAM系列致動器使用外接式的磁簧開關。(default Setting : Open)
LAS,LAF,LAH1系列致動器使用內建式的微動開關。(default Setting : Close)
致動器如果沒有加裝極限開關,可以使用嗎?
可以,但是必須以控制器的過電流設定來控制,控制器建議使用HIWIN的產品,如不當的控制,可能導致致動器的損壞。
HIWIN的致動器可任意調整行程嗎?
只有選用LAI,LAM系列有加裝外部磁簧開關的致動器才可以;其他內建式極限開關的產品不可以。
高速的致動器(30~50 mm/sec)可以提供嗎?
是的,可選用LAF系列的產品。
負載(Load)超過7000N的致動器可以提供嗎?
無,目前無法提供此項產品。
是否提供同步及定位功能的致動器?
是的,可選用LAH1或LAS-3系列的產品。
HIWIN致動器馬達是否有過熱保護裝置?
標準品無。
可應客戶需求加裝(馬達表面溫度70oC)時自動切斷馬達電源,溫度降至70oC以下自動恢復運轉)
HIWIN致動器馬達是否有過熱保護裝置?
標準品無。
可應客戶需求加裝(馬達表面溫度70oC)時自動切斷馬達電源,溫度降至70oC以下自動恢復運轉)
致動器行程超過型錄上尺寸時,可以提供嗎?
是的,但是必須考慮負載(Load)的大小及致動器的強度
可提供有蓄電池的控制器嗎?
是的,可選用LAK2B的產品。
HIWIN的致動器環境使用溫度是多少?
-5oC ~ 50oC
為何HIWIN的致動器沒有UL標籤?
因為HIWIN的致動器是使用24V以下的直流馬達,一般24V以下的直流馬達不需UL認證。
如何正確貼尺?
磁性尺身貼付前、須以酒精、IPA類或清潔液將被貼付處擦拭乾淨後、再將尺身背面雙面膠保護貼紙撕離後、貼於指定處。
貼尺前請確認貼尺面是否平坦面(最好維持在0.1mm以下的平面度)、以最高分解能5μm的產品而言、雖然Gap公差為0.1~2mm、但考慮公差問題時、最佳Gap條件最好設定為0.6±0.5mm內、1μm機種建議為0.1±0.07mm。且盡可能接近讀頭與尺身之間隔。
可依預設間隙規來設定Gap。其他方向可以兩端定位固定後邊撕開雙面膠保護貼紙邊貼上。或利用專用冶具(參考型錄最後一頁選購件),比較容易貼附。
PMLD產品,斷電或更換電池後重新啟動時須注意哪些事項?
重新使用前必需再經過TUNE功能校正,LCD顯示OK方可使精度符合規範。
產品是否合乎RoHs要求?
有,產品上貼有綠色標籤者皆為符合RoHS的產品。
何為RS422介面?
RS-422一系列的規定採用4線,差動傳輸,抗干擾能力強,並適合於工業環境的長距離訊號傳輸。
A/B相的訊號意義說明
A/B相訊號主要是Encoder回授所定義的一種可以減少干擾的回授訊號格式,該信號兩個相位差異90度,透過特殊的解碼後可以將干擾訊號去除。
PMLD產品是否可用市電供應?
目前電源使用3號電池2顆,無法使用市電。
PMLD之儲存溫度及工作溫度為多少?
工作溫度為0~50度C 儲存溫度為 -5~70度C
惡劣環境使用時的注意事項為何?
基本上不會影響產品精度、但大量使用的切削油、水等盡量不要直接撥到尺身,可以的話以Cover遮蔽,因長期沖刷會加速雙面膠劣化甚至脫落。建議參考型錄最後ㄧ頁的位置尺固定片,固定位置尺的兩端,加裝位置尺固定片可防止尺身脫落。
切削環境使用時的注意事項為何?
基本上不會影響精度、但是若加工物為磁性、鐵或其他金屬等材質時,其較輕之切削屑會多少被吸付,此時建議選用有刮刷片之型式之位置讀頭或有金屬套管的產品。
熱切削加工及電磁干擾之惡劣環境中使用時應注意之事項為何?
加工機之應用上應注意於信號線的保護、選用有金屬套管品、也可加強受電磁波或靜電干擾。
注意機械本身及位置測量器之接地是否良好。
檢查機械本身是否有漏電流之現象。
磁性尺的輸出訊號可否與現行之工作機械使用之顯示器共通?
請直接選用HIWIN MIKROSYSTEM之高精度顯示器使用。
可直接裝在工作機械上使用。配合高階顯示器作系統回授或顯示。
一部分有共通。例如Mitutoyo公司之顯示器上可購入轉換線即可直接接上讀取及顯示位置。(目前輸出訊號有類比及數位信號可轉接、解析度1μm、精度±20μm/m)。
磁性位置測量器的使用範圍為何?
全凡有須讀取移動量之位置訊號的可動部(如:滑台、滑軌、各X,Y,Z軸Stage移動、線性馬達、各種裁切加工機、工作機械…等等)之使用或者利用其位置移動訊號來回授給系統做各種之自動控制等均可使用。
磁性位置測量器與光學尺有何不同?
光學尺是利用光學反射、折射以及繞射原理來取得位置訊號、基本上精度會比以磁性原理的磁性尺來的高。一般使用上光學尺每米精度約為0.5~5μm。
磁性尺約為1~100μm因使用上的須求最近已發展到0.5~20μm接近光學尺的精度。
光學尺在使用上須有乾淨的環境、否即須有覆蓋之設計、或全部以金屬包覆使用。磁性尺則不用太考慮使用的惡劣環境、切削油、水等之環境也可測定。價格而言、如短行程(500mm行程)時較磁性尺稍貴、但長行程使用上磁性尺比較有利、差價就會一舉拉開。例:同1μm解析度(分解能)之1米長以上約2.5倍、2米長以上約5倍價格。若精度的要求不高的話實用價值非常高。有助於建構較低價系統。
解析度1um的數位位置量測器輸出訊號為何?最大速度為多少?
輸出訊號為數位5V RS422/TTL方形波,最大速度為7m/sec
PM產品有哪些?
位置量測器;訊號轉換器;高性能顯示器(工具機用對應機種) ;高性能單軸顯示器 ;LED顯示器
PMLD設定速度為1.5m/s時,電池可用多久時間?
約1年,此屬消耗品,殘餘電量指示燈亮LOW時請交換新電池。更換電池之後請進行TUNE功能校正。
1mm訊號轉換器ST-B之最大速度?
RS-422/TTL輸出時最大速度為5m/sec、開集極輸出時最大速度為0.8m/sec
1mm訊號轉換器(ST-B)之功能?
將1mm位置量測器(類比)之訊號轉換成數位訊號輸出,其輸出訊號可為RS-422差動輸出或開集極輸出。
5mm的位置尺可否用1mm的讀頭來搭配?
不能使用,由於讀頭的規格不同,解析訊號也不同,搭配使用時必須注意。
位置尺的使用環境為何?
可在油漬的環境或水性的環境中使用,避免與具強磁性的的物體或設備接觸,例如:磁鐵、充磁機、消磁機等。
PS之護板及基板之差異性?
基板為導磁材料;護板為透磁材料
1mm讀頭上之三角形及箭頭代表什麼意義?
三角形:指讀頭之Sensor的中心位置
箭頭方向:位置量測器移動方向與箭頭同方向時,表示SIN訊號相位領先COS訊號相位。
5mm磁帶與1mm磁帶其系統精度各為何?
1mm 磁帶精度為 ±20um/m以內;5mm磁帶精度為(±85um+15um/m)以內。
PMLD 精度為何會超過標準(±85um+15um/m)
首先應該注意是否有在使用前再次經過TUNE功能校正,LCD顯示OK方可使精度符合規範。
若以上事項確認無問題、還是無法解決請再次檢查位置讀頭與尺身之裝設位置是否合乎規定。特別Gap尺寸是否在2mm以內。最好設在0.6mm±0.5mm前後。(最高解析度5μm機種。1μm機種建議為0.1±0.07mm)、可能的話越接近信號越強、越有效的增進精確性。
上银产品
DN值定义为何? DN值的安全极限?
DN值定义
以DmN值来评定滚珠丝杠高速性,Dm为滚珠丝杠上下滚珠之中心圆
直径(P.C.D),N为丝杠最大回转数,所以DmN值即表示滚珠之公转速
度,DmN值即为该滚珠丝杠的设计高速极限。
为方便计,以丝杠外径D取代Dm。以50ψx 30 滚珠丝杠而 言,当丝杠最
大回转数为3000rpm时,DN值可达15万,最大进给速度为 90 m/min。
高DN值与高导程的应用差异性为何?
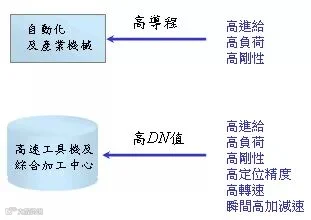
高DN值与高导程的差异性
设计理念
高导程:以丝杠导程增加,提升进给速度
高DN值:回转数与导程之有效平衡考量如精度、动静负荷、临界速度、 惯性力诱发振动、温升等高速化引发的问题。
丝杠材质及特性为何?
材质:滚珠丝杠之丝杠材质一般是使用高碳合金钢(参照下表)等材质;
特性:高碳合金钢含碳量达0.45%以上,适合感应热处理,能使材料具有良好的表面硬度及表面耐磨耗性,滚珠丝杠因此具有优良的使用寿命;同时由于材料的心部未麻田散铁化而保持变韧铁组织,抗拉强度高而韧性强,故丝杠不易因为冲击性的负荷而发生断裂。
螺母材质及特性为何?
材质:滚珠丝杠之螺母材质一般是使用SCM415H、SCM420H、SNCM220等低碳合金钢
特性:低碳合金钢适合使用渗碳淬火的热处理硬化方式,使材料具有良好的表面硬度及表面耐磨耗性,滚珠丝杠因此具有良好的使用寿命;同时由于材料的心部未麻田散铁化而保持变韧铁组织,抗拉强度高而韧性强。
丝杠、螺母及钢珠其硬度为多少?
研磨级丝杠、螺母:58~62HRC
转造级丝杠、螺母:56~62HRC
钢珠:62~66HRC
滚珠丝杠何时需要预压?预压对有何优缺点?
A:机器精度要求高,而机器的背隙上限值小的时侯(如配合直线导轨使用可以使机器的反向运动背隙接近于零)。
B:优点:消除背隙;消除背隙可使机械传动的精度更为稳定,且机械传动结构的刚性提高。缺点:降低机械效率,预压若过大会产生温升问题及寿命降低,所以滚珠丝杠的预压必须设定在一合理范围内。
滚珠丝杠的预压产生方式有哪几种设计?其差异为何?
A:单螺母预压:(包含过大钢珠预压方式、导程偏移预压方式);双螺母预压:(包含:拉伸预压方式、压缩预压方式)
B:过大钢珠预压方式:(以钢珠大小,调整预压)特征:钢珠与珠槽四点接触,适用于轻预压.
导程偏移预压方式:(加大节距或缩小节距) 特征:在螺母节距上作δ值的偏移来取代传统双螺母预压方式,此方式较适用于中轻预压,最好将预压力设计在5%动负荷以下。
拉伸预压方式 特征:使用一过厚的预压片将两个螺母外张方式达到预压之效果,此为HIWIN精密级滚珠丝杠最常使用的方式。 压缩预压 特征:由较薄的预压片,再以螺栓将两螺母锁紧一起,达到预压之效果。
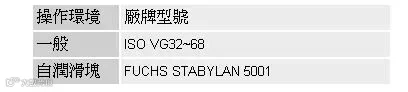
滚珠丝杠之润滑油脂如何选用?
一般建议以轴承润滑油为滚珠丝杠之润滑油,如要使用油脂则建议以锂皂基的油脂。油品的黏度选用是依操作速度、工作温度及负荷的情形来做选择。高速时,建议使用的润滑油为40℃时的黏度指数范围32~68 cSt (ISO VG 32~68)(DIN 51519)。低速时,建议使用的润滑油为40℃时的黏度指数范围在90 cSt (ISO VG 90)以上。
用于高速且重负载的时后,必须以强制冷却来降低温度,且可藉由中空丝杠通入冷却油或水来达到冷却效果。
油:每周检查油量及去污;润滑油脏污时建议更换润滑油
油脂:每2~3个月检查是否有脏污的碎屑混入;油脂脏污时,清除旧有油脂并更换新油脂;每年更换油脂
常用的油嘴及接头有哪些?在设计需要考虑哪些因素?
A:公制有M6、M8*1P,英制则为1/8"PT
B:设计考虑因素:空间考量;注油位置最好于法兰上方或上方45度角位置,以提供注油的最好效果(油品可以由于重力而进入螺母内部)。
何谓静负荷?
滚珠丝杠在静止状态,滚珠和轨道接触面都不致产生大于万分之一(0.0001)钢珠直径之塑性变形量时,滚珠丝杠之最大可承受负荷。
高防尘滚珠丝杠的使用时机为何?
HIWIN特殊设计的高防尘滚珠丝杠,使用多层防尘材料紧密包覆丝杠,所以尘屑不易进入,而能达到高防尘效果;其适用在较高尘屑的工作环境,例如:木工业、橡塑胶…等。
什么时机应设计配珠?配珠有何优缺点?
A:设计时机:于机构空间不足使用单螺母预压方式时,为了提升其动作特性,一般建议以1:1配珠。
B:优点:能提升其动作特性,减少相邻钢珠间之相互摩擦。缺点:减低丝杠动负荷。
丝杠中空使用时机为何?有何优点?
A:一般较适合于丝杠温升要求较严格的机器。使用中空丝杠,由于可以通油或水来冷却丝杠,故丝杠本身不易发热,可有效控制温度,达到精度稳定目的。
B:中空滚珠丝杠具有重量减轻之优点,因此丝杠比较不易因自重而下垂过大,而且由于丝杠之惯量减少,使马达之驱动扭力降低;另一方面,由于丝杠的中空部份可以使冷却剂流经而达到降低丝杠温度之用,因此丝杠的温度可以得到较佳的控制。
滚珠丝杠安装时应注意那些事项?
滚珠丝杠为精密的机械零组装,所以在安装时需注意下列事项:
(1)滚珠丝杠必须保持干净及擦拭清洁,不使异物进入螺母内。
(2)不可任意敲打,并保持外观不碰撞伤。
(3)安装面的表面修整及清洁要彻底。
(4)合宜的公差及精确的校正。
(5)适宜的润滑。
(6)不可将丝杠与螺母分离。
(7)最好在丝杠两端加装防撞器,以避免运转超过行程极限而损伤滚珠丝杠。
(8)使用保护套来保护滚珠丝杠,并且防尘。
轴承背对背组合【DB】有何优缺点?
优点:作用点间的距离较大,刚性较佳。
缺点:较易受几何精度影响。
轴承面对面组合【DF】有何优缺点?
优点:较易组装,几何精度影响较小。
缺点:作用点间的距离较小,刚性较差。
丝杠一般的预拉量为何?
一般以1米长约0.02~0.03mm为预拉值。
基准轨与从动轨之差异
基准轨滑块侧边基准面是要作为床台安装承靠面,因此其滑块成控制〈从动轨滑块成对宽度差不保证〉。基准轨上有刻上MA之记号
何谓预压?何谓摩擦阻力?
遇压力是存在轨道与钢珠之间的内力总合,目的是为了提升刚性法直接量测,而遇压力与摩擦力之间呈线性相关,因此遇压力的范围去定义。为了量测准确性须在不装刮油片状况下量测。
摩擦阻力是推动一个滑块所需的力量,摩擦力来源包含预压力、在负荷。
如何计算驱动直线导轨所需推力?
在直线导轨不受轴向负荷的情况下,所需推力相当于摩擦力,摩擦力F之计算方式如下〈如直线导轨受轴向外力,则需加减该项外力值〉:
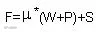
其中:
F:摩擦力(kgf)
S:刮油片阻力(kgf) :摩擦力系数(直线导轨的摩擦系数约为0.01)
:摩擦力系数(直线导轨的摩擦系数约为0.01)
P:预压力(kgf)
W:运动垂直方向负荷(kgf)
直线导轨适用环境?
一般件:
金属端盖:可耐 ,瞬间
特殊环境,低温、洁净室、真空、食品业等需求请事先与我们连络。
直线导轨润滑油选用
油脂:

润滑油:
导轨安装螺丝扭力值

注:螺栓等级12.9
为何使用U型导轨?
导引导轨与底座结合,成为U型结构体称“U型导轨”,有省空间、高刚性、高精度与简化零件功能,可提供相对的轻量化,成为高精密定位平台。省空间:虽然组装介面的尺寸与同类产品相当,但是,HIWIN的U型导轨外型则更为缩小,具有更小的空间,如此的安排可让U型导轨的重心落在底面上。刚性强:透过有限元素法之最佳化设计, U型导轨的刚性亦可同时获得提升。高精密定位平台:精密制造之U型导轨与滚珠丝杠,透过轨道与轴承之刚性,达到精密定位目的。
如何连接马达?
驱动马达可选择市场上伺服与步进马达,各厂牌外形及尺寸些微差异,连结方式为使用马达连接法兰,安装于精密线性模组上,经由连轴器直结方式,带动滚珠丝杠而使滑台移动;亦可选择回转型马达连接法兰,使用齿型皮带移动滑台。低惯量伺服马达非常适合使用于精密线性模组,可有高速度与高精度;在使用步进马达时,搭配微步进之驱动器,相对的提高解析度,可得低单价与高精密定位。
如何安装?
精简之标准模组设计与安装界面,使用线性模组相当容易,将相关工件锁固,不需经复杂之调整程序,即可架设高精度线性传动应用。为了让使用者更方便的安装,在U型导轨及滑座上均安排有供组装之承靠面,让组装的精度要求可以轻易达成。
如何计算解析度及运动速度?
由滚珠丝杠与使用马达决定,公式如下:

R : 解析度(mm)
L : 滚珠丝杠导程(mm)
P : 驱动马达每一转脉波数(pulse/r)
e : 减速比
如 L=10mm, P=10,000 pulse/r,e=1
而得解析度为0.001mm=1μm

V : 运动速度m/min
L : 滚珠丝杠导程(mm)
N : 驱动马达旋转速度(r/min)
e : 减速比
如 L=10mm, N=3,000 r/min,e=1
而得运动速度为30m/min=500mm/sec
