搜索
首页
大数快讯
大数活动
服务超市
文章专题
出海平台
流量密码
出海蓝图
产业赛道
物流仓储
跨境支付
选品策略
实操手册
报告
跨企查
百科
导航
知识体系
工具箱
产业园
更多
找货源
跨境招聘
DeepSeek
首页
>
书写机器人硬件解剖
>
书写机器人硬件解剖
南京易纹兴
2023-02-16
2
导读:市面上常见的书写机器人的机械结构实际上非常简单......
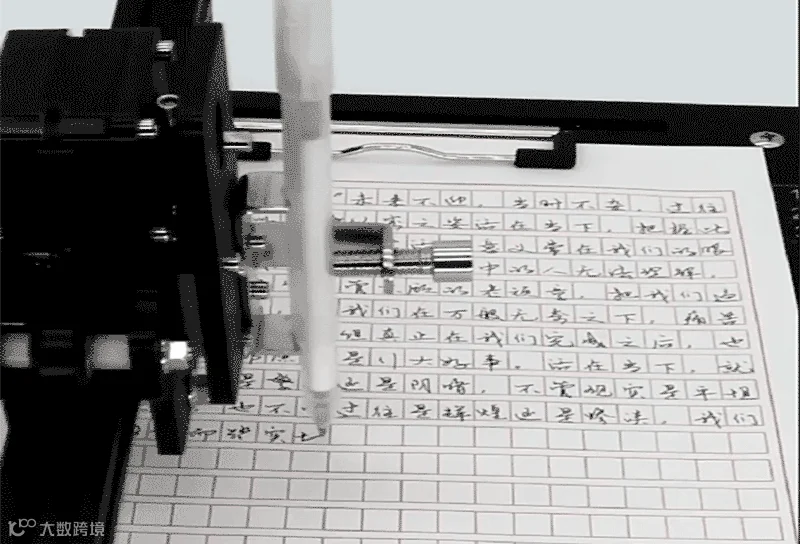
书写机器人的出现
使得机器
仿写成为文检人员面临的一大挑战,然而市面上常见的书写机器人的机械结构实际上非常简单。
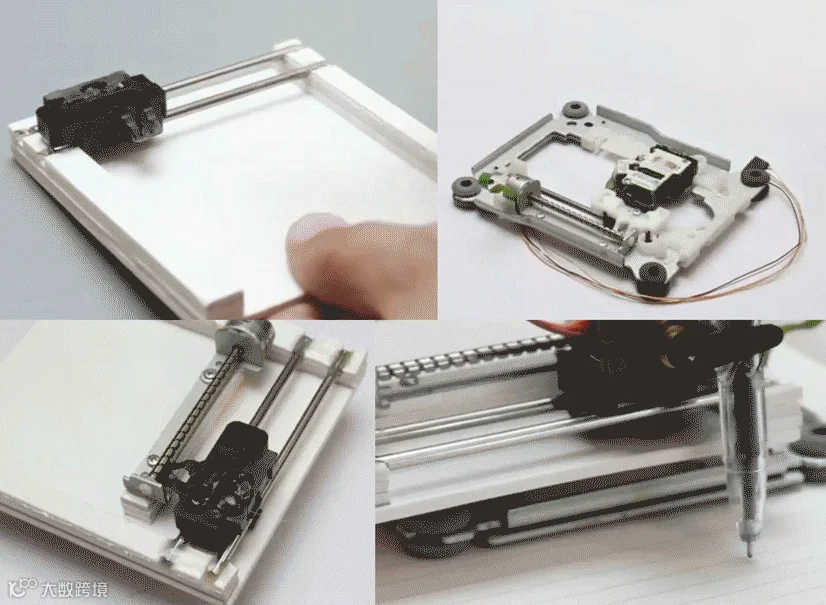
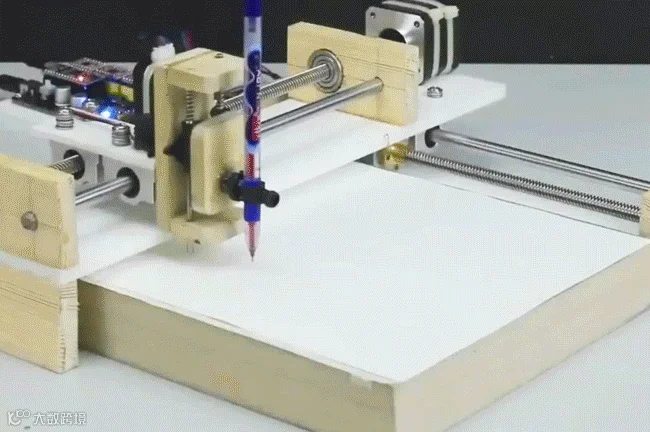
以下是网络达人自制的书写机器人,其硬件由
三个行程轴
组成。
大部分书写机器人都采用这种硬件结构。
硬件
组成
:
平面移动
由
X
,
Y
两条行程轴负责,各由一个电机驱动,
控制笔在书写平面的前后左右
位置,
具有一定的精度
。
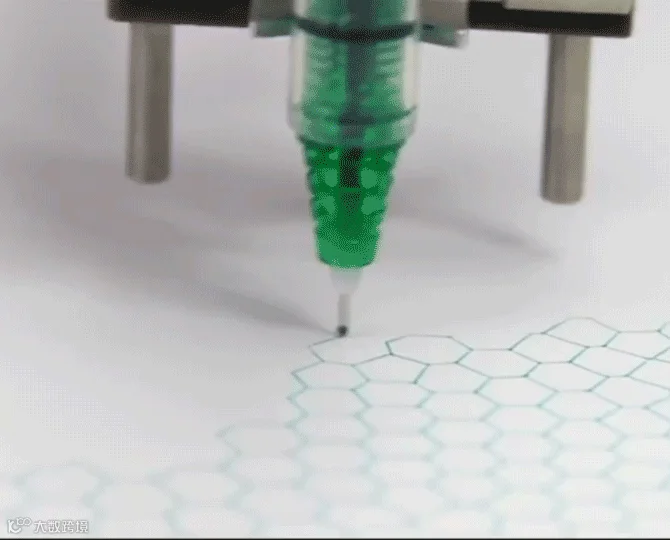
纵向移动
由
Z
行程轴负责,
控制笔的起落
,因为书写任务多数只在平面上进行,所以纵向的
精度不高
,通常只由一个舵机驱动。
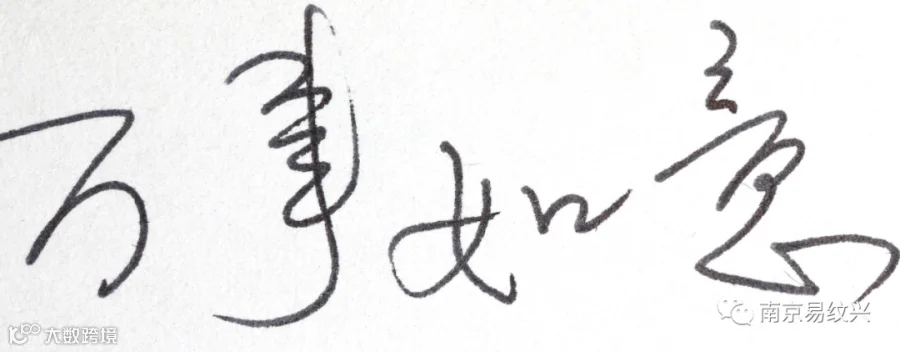
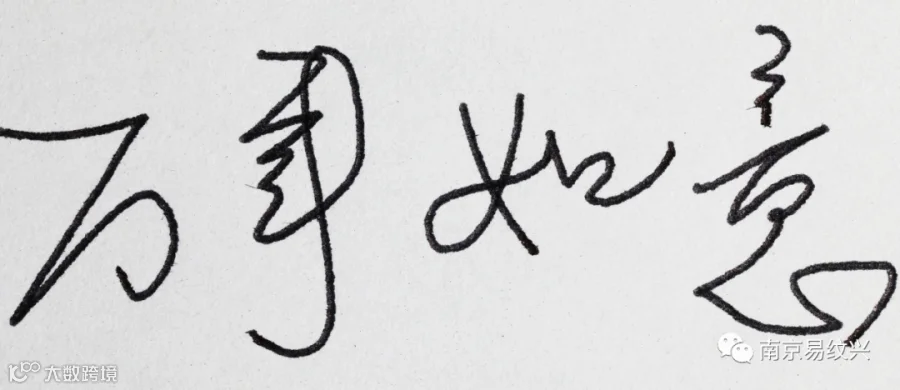
受到简单硬件的限制,这类书写机器人在灵活度上与人手相差甚远,其中很大一部分差距是由Z轴产生的。因为纵向的精度过低,
无法呈现出人手书写时细腻的高度和力度变化
,使其成为辨别机器人仿写的一个特征。
差异表现:
上:人写
下:机器人仿写
同时机器人还存在书写时无法改变执笔
角度
等肉眼无法辨识的特征,在辨识这些特征和检验更高科技的机器人仿写时,则可以利用
3D重建
、
RTI影像
等现代科技手段。
后续我们也会介绍RTI、3D重建和更多现代科技检验手段,
欢
迎关注我们,
我们乐于将我们的
发现分享给大家!
也可以加入超易学堂了解更多相关资讯哦~
【声明】内容源于网络
0
0
南京易纹兴
南京易纹兴智能科技有限公司主要项目之一是推广反射变换成像技术,并生产和销售专用于此技术的智能设备和配套辅助设备。自主研发生产的产品实属国内首创,拥有国家实用新型专利。
内容
14
粉丝
0
关注
在线咨询
南京易纹兴
南京易纹兴智能科技有限公司主要项目之一是推广反射变换成像技术,并生产和销售专用于此技术的智能设备和配套辅助设备。自主研发生产的产品实属国内首创,拥有国家实用新型专利。
总阅读
0
粉丝
0
内容
14
 南京易纹兴
南京易纹兴