搜索
首页
大数快讯
大数活动
服务超市
文章专题
出海平台
流量密码
出海蓝图
产业赛道
物流仓储
跨境支付
选品策略
实操手册
报告
跨企查
百科
导航
知识体系
工具箱
产业园
更多
找货源
跨境招聘
DeepSeek
首页
>
机器人抓取定位引导
>
机器人抓取定位引导
山东科耀视觉
2017-11-29
1
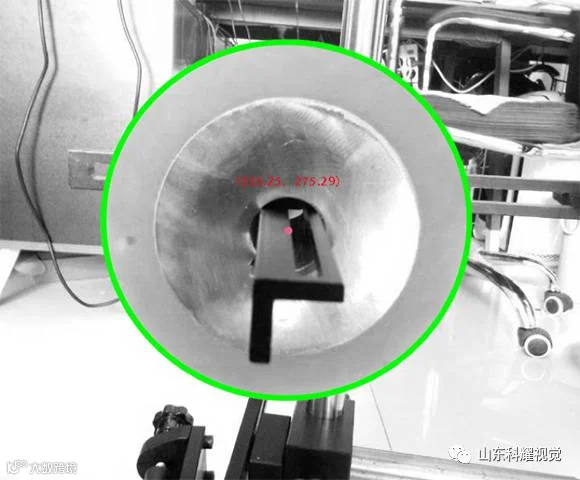
导读:利用工业相机自动识别工件的圆心位置,并且将位置坐标传输给抓取机器人,引导机器人完成抓取动作。测试结果以准确快
识别目标
利用工业相机自动识别工件的圆心位置,并且将位置坐标传输给抓取机器人,引导机器人完成抓取动作。
测试结果
以准确快速找到工件圆心,整个过程约0.2S,重复性和可靠性完全符合要求。
【声明】内容源于网络
0
0
山东科耀视觉
机器视觉,视觉定位,视觉引导,图像分析,智能工厂,数据分析,计算机图形识别技术,工业视觉检测技术,互联网,自主研发
内容
111
粉丝
0
关注
在线咨询
山东科耀视觉
机器视觉,视觉定位,视觉引导,图像分析,智能工厂,数据分析,计算机图形识别技术,工业视觉检测技术,互联网,自主研发
总阅读
0
粉丝
0
内容
111

 山东科耀视觉
山东科耀视觉