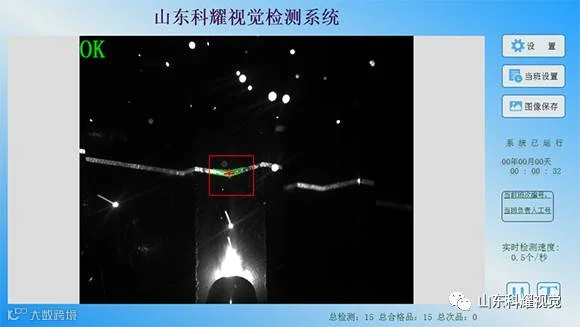
检测目标
焊接过程中实时判断焊缝位置,并在焊接部位将要发生偏差时反馈给机器人进行预先校正。
检测结果及结论
结果说明
目测试机器人采用库卡焊接机器人,经过反复测试,在不同强度焊接弧光干扰下都能准确找到焊缝位置。

 山东科耀视觉
山东科耀视觉