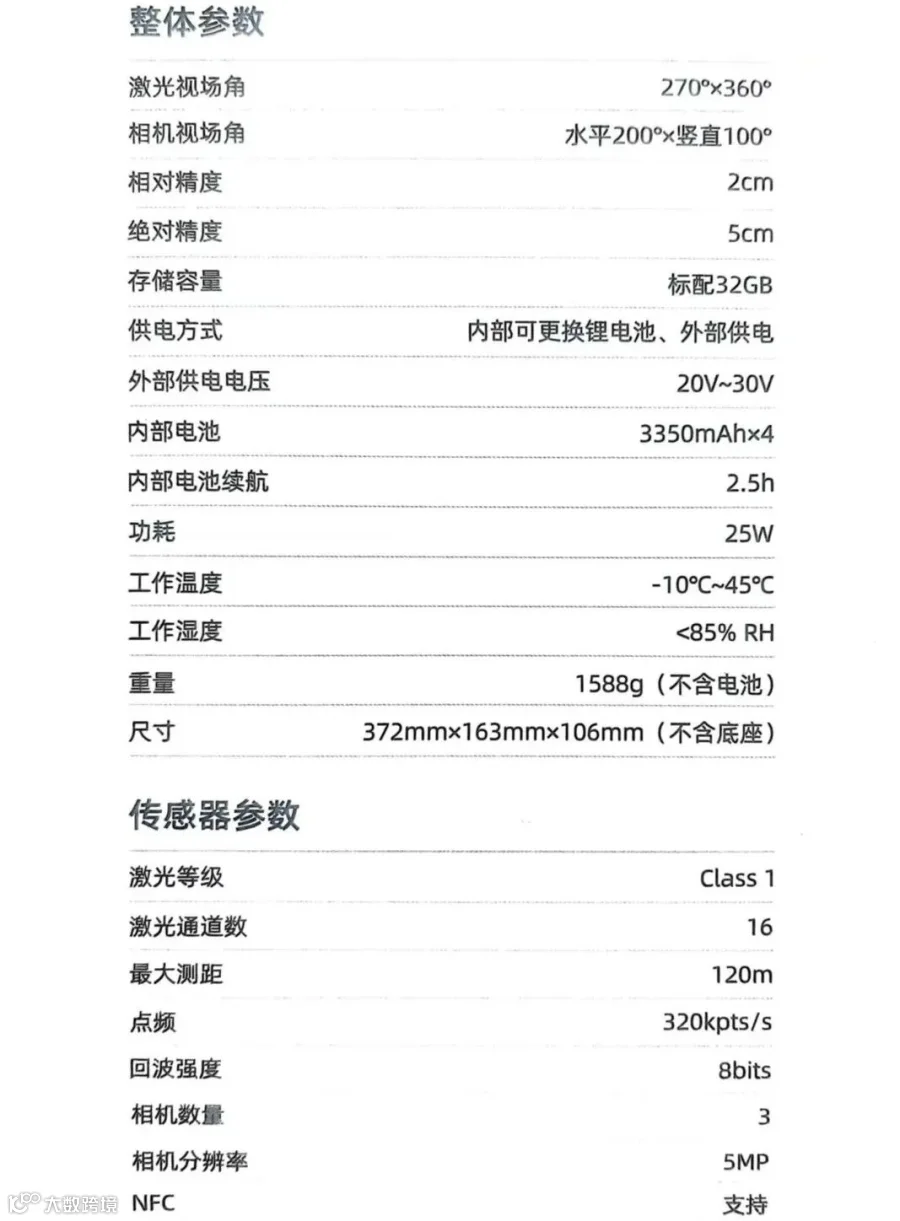
SLAM100 270°×360°激光视场角
旋转式扫描,激光传感器动态采集可形成270°×360°球形视场角,精准采集各个角落数据,保障数据的完整性。
搭配可见光相机
选用三颗500万像素摄像头,形成水平200度、垂直100度视场角,可同步获取纹理信息,生成彩色点云和局部全景图。
高精度、高精细度
行业级SLAM后处理算法,使得SLAM100可以获取更高精度、更加精细的三维点云数据。
控制点自动采集
无需手动添加控制点,主动式采集和自动化提取,可以轻松将成果数据放置在全局坐标系中。
飞行平台挂载
飞行平台挂载,可支持挂载在飞马D500和D20飞行平台上,进行空地一体化、室内外一体化数据采集。

丰富的外部接口
丰富的外部接口,可外接全景相机、GNSS模块等,使数据采集多样化,以适用更多的应用场景。