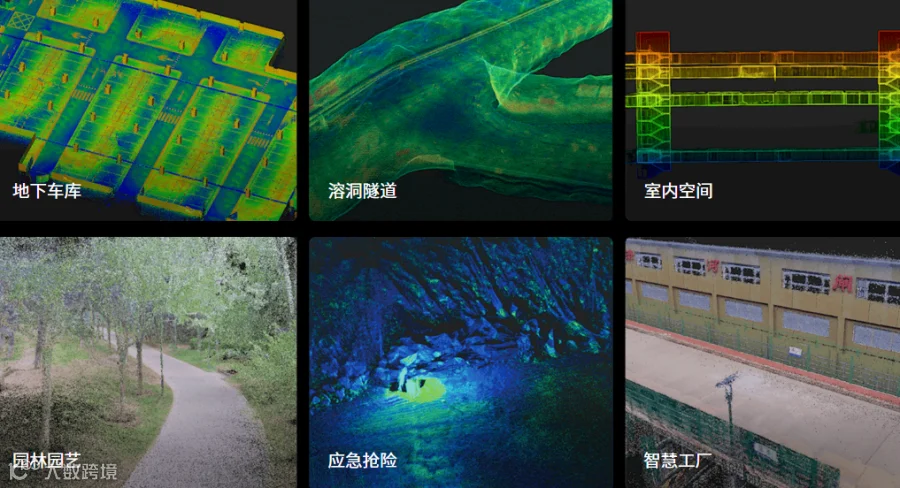
全景式激光视场角
采用半球形非重复式扫描激光器,集成360度旋转云台,可形成全景式激光视场角度,确保全方位、多角度的数据采集,实现“所行即所见,所见即所得”的高效率场景数据转化。

实时建图
可进行实时建图,即在数据采集的过程中进行地图构建,在数据采集完成后直接输出成果数据,适用于应急救援、实时测绘等要求成果时效性的应用场景。

高精度测绘
内置高精度惯导,可有效控制累计误差;高精度雷达标定算法,进一步提升激光传感器精度;行业级SLAM算法,打造高精度测绘利器。
视觉相机
1200万像素视觉相机,可采集并运行视觉SLAM算法,为弱结构纹理环境提供匹配特征点,避免因结构重复、匹配错误而导致的误差,提高设备的场景适用性。同时,视觉相机也可作为高分辨率细节相机,获取局部场景的高清影像。
赋色相机
1200万像素分辨率,210°视场角度,可获取更大范围、更高分辨率的地物纹理信息。赋色算法专为测绘场景优化,彩色点云更加清晰、细腻。
丰富扩展
SLAM2000具有丰富的外部扩展,支持手持、背包、静态站模式,并支持外接电源、RTK、延长杆模块等,可满足用户更多的应用需求。