

点击上方蓝色字体关注我们,即可联系线上工程师
博创控制系统自带软件PLC,可实现简单的IO信号逻辑交互、监控或控制机器人运动等,其执行原理与市面上的PLC设备基本一致。学习使用系统自带的PLC编程,可满足您现场的调试与生产需求。
本期,小编将分享如何使用博创系统中的PLC编程?
PLC开机自启动
设置PLC自启动后,可实现机器人断电重启后,自动运行PLC程序,无需手动启动。
设置路径:
“PLC运动”——“PLC程序”——“单击要设置的PLC程序”——“菜单”——“设置程序自启动”

PLC梯形图基础符号
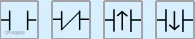
从左至右分别为:
常开触点:外部信号无变化保持常开状态,有变化切换至闭合状态。
常闭触点:外部信号无变化保持常闭状态,有变化切换至断开状态。
上升沿触点:外部信号由低电平变化到高电平瞬间有效,切换至闭合状态。
下降沿触点:外部信号由高电变化到低电平瞬间有效,切换至闭合状态。
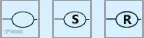
从左至右分别为:
普通输出线圈:条件满足时,输出高电平;条件不满足时,恢复低电平。
置位输出线圈:条件满足时,始终保持高电平输出;信号撤掉后不改变状态。
复位输出线圈:条件满足时,始终保持低电平输出;信号撤掉后不改变状态。

X输入与Y输出继电器
符号定义:
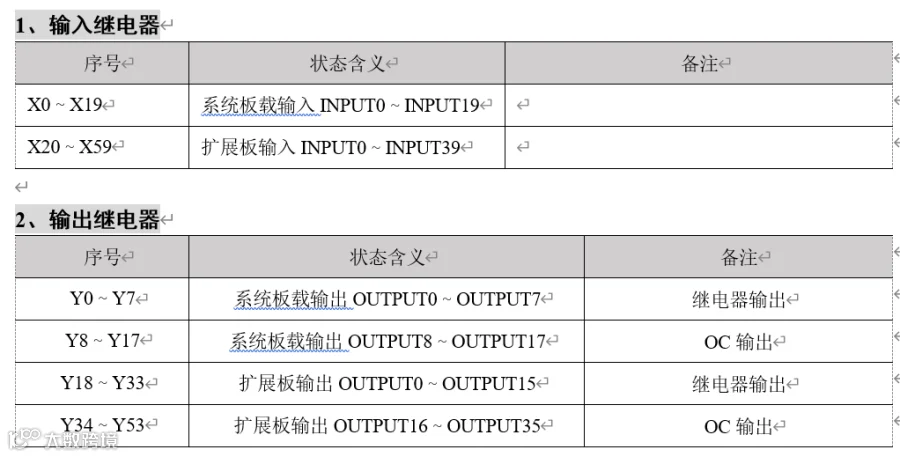
X、Y符号根据控制器或扩展IO板上的IN和OUT口状态判断触发。
X仅作为梯形图输入。
应用案例:
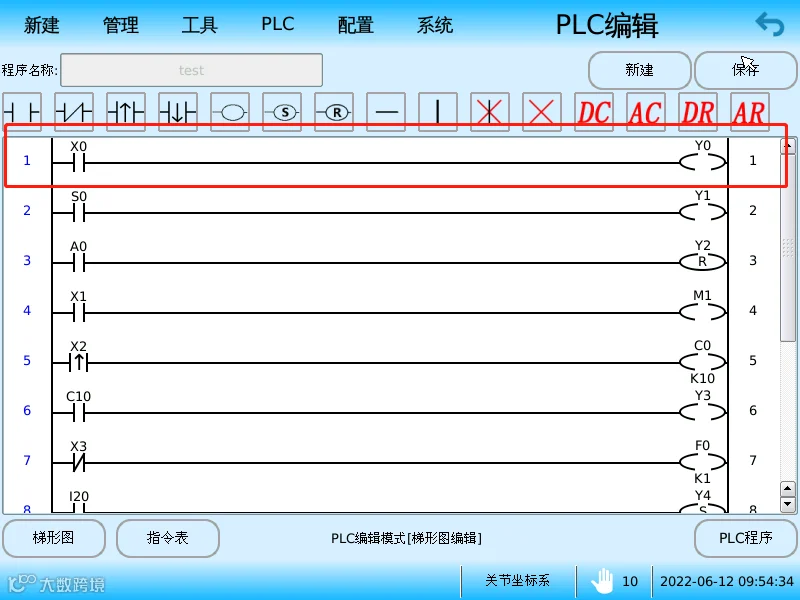
红框内梯形图逻辑效果为:
当X0信号为高电平时,Y0输出高电平;当X0信号为低电平时,Y0输出低电平。

S状态继电器
符号定义:
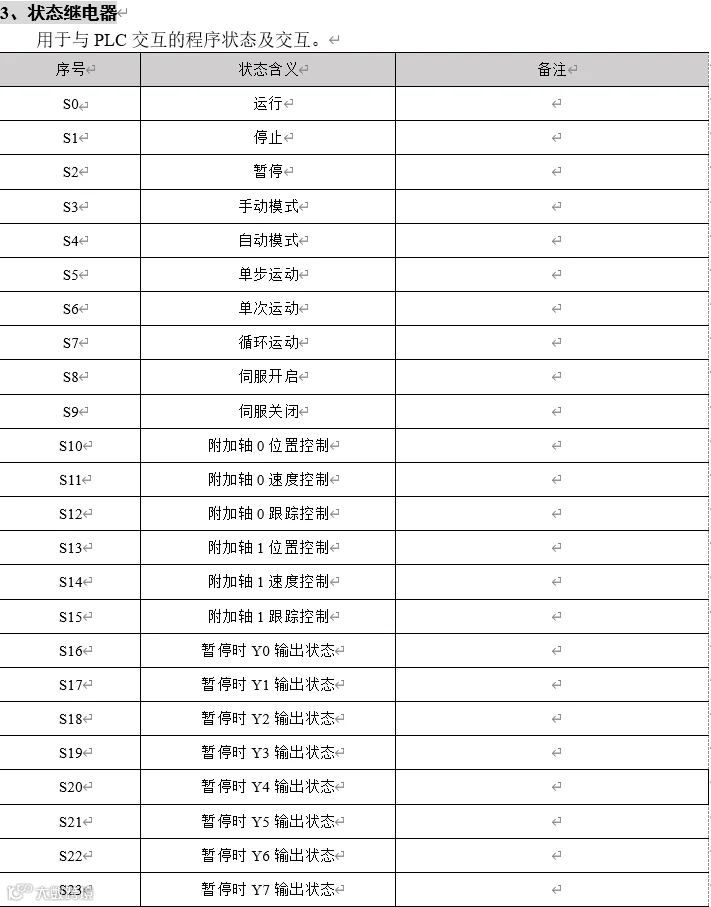
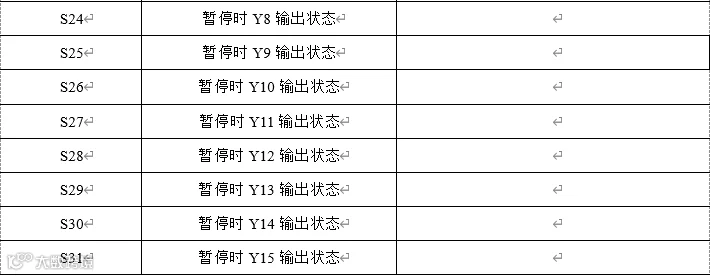
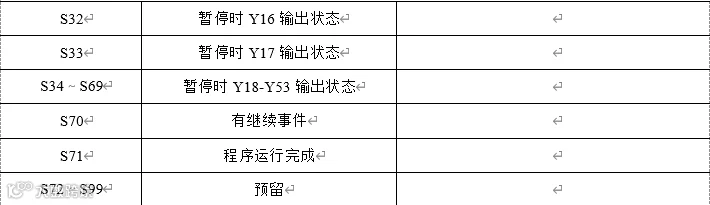
S状态继电器是根据机器人当前状态判断触发。
S仅作为梯形图输入。
应用案例:
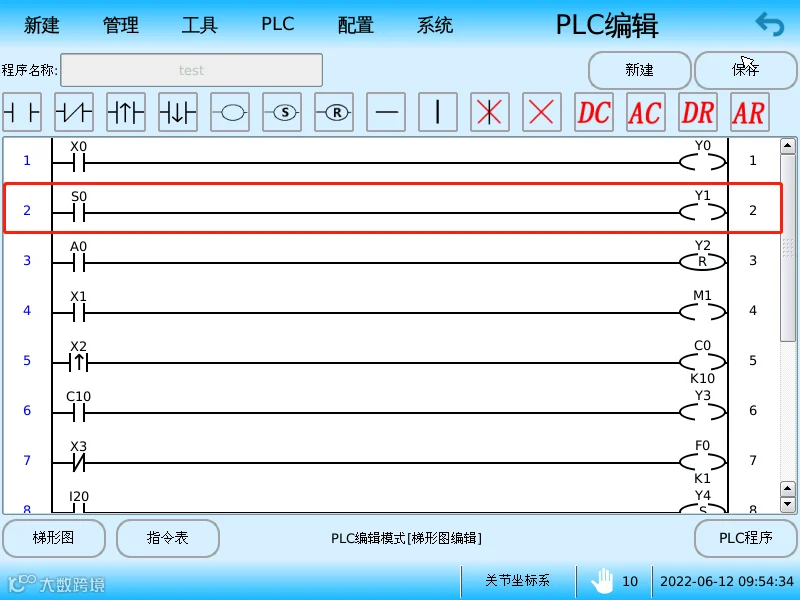
红框内梯形图逻辑效果为:
当机器人处于运动状态时S0触发,Y1输出高电平。当机器人停止运动时,Y1输出低电平。

A报警继电器
符号定义:

A报警继电器是根据示教器报警状态判断触发。
A仅作为梯形图输入。
应用案例:
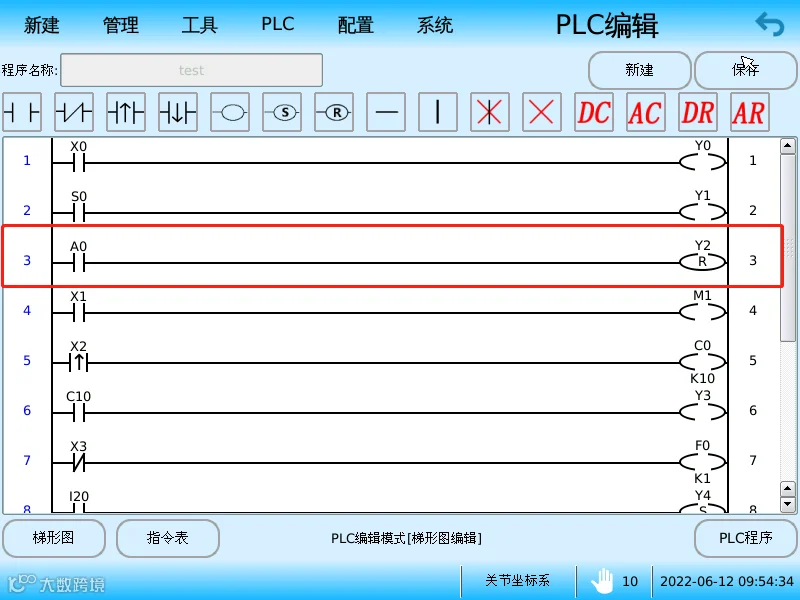
红框内梯形图逻辑效果为:
当示教器有任何报警反馈时A0触发,Y2始终保持低电平输出(复位输出)。

M通用继电器
符号定义:

M通用继电器可保存运算中所需要中间变量的状态。
可在PLC梯形图中传递信号,也可作为机器人程序与PLC程序之间的信号交互节点。
M通用继电器手动设置路径:
1.“菜单”——“基础端口操作”——“监测继电器端口”——“添加”
2.“程序编辑界面”——“基础指令”——“PLC操作”——“添加”
应用案例:
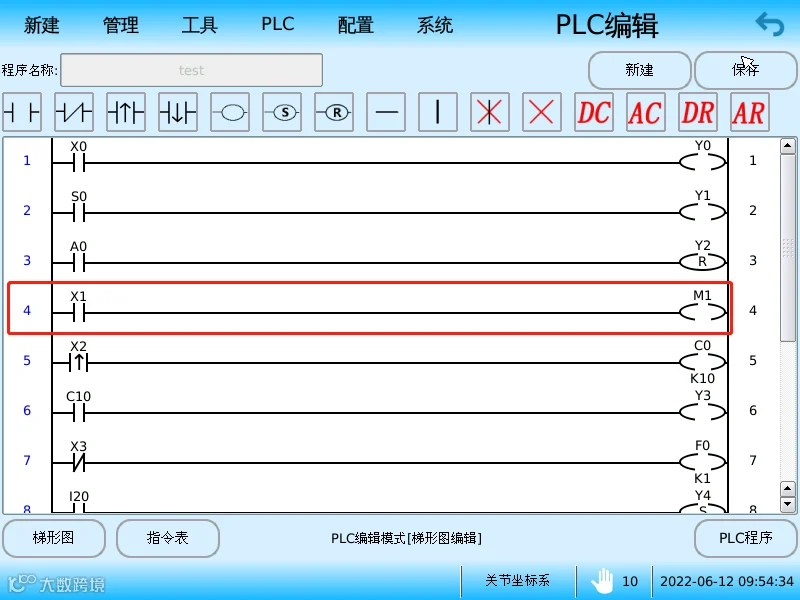
红框内梯形图逻辑效果为:
当X1信号为高电平时,M1继电器高电平有效。当X1信号为低电平时,M1继电器恢复低电平。

计数器
符号定义:

C计数器可统计条件满足的次数,当统计次数达到预设次数(参数K)时,C计数器触发。
C计数器触发后将始终保存有效状态,需要进行复位才可再次计数。
应用案例:
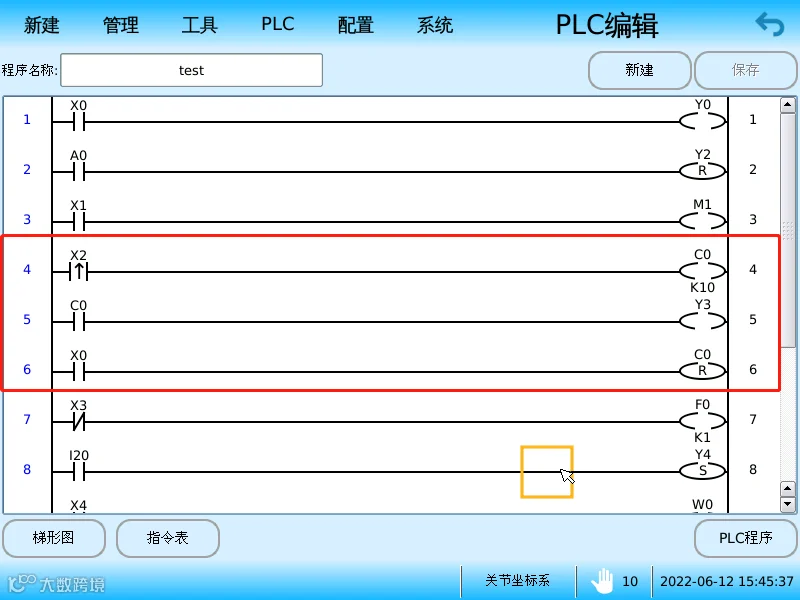
红框内梯形图逻辑效果为:
统计X2的上升沿触发的次数。当X2第十次上升沿触发时,C0计数器计满有效,Y3输出高电平。
当X0为高电平时,复位C0计数器,重新开始计数。

F热键继电器
符号定义:
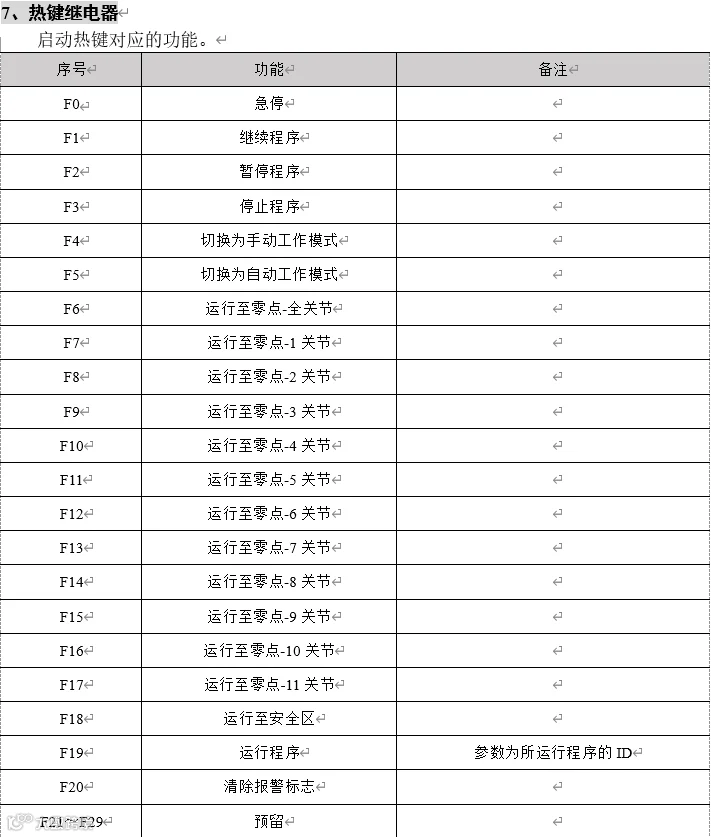
F热键继电器可控制机器人执行对应功能。
F热键继电器仅作为梯形图输出。
除F0 F4 F5 F20外,其它均无法在示教器手动模式触发。
应用案例:
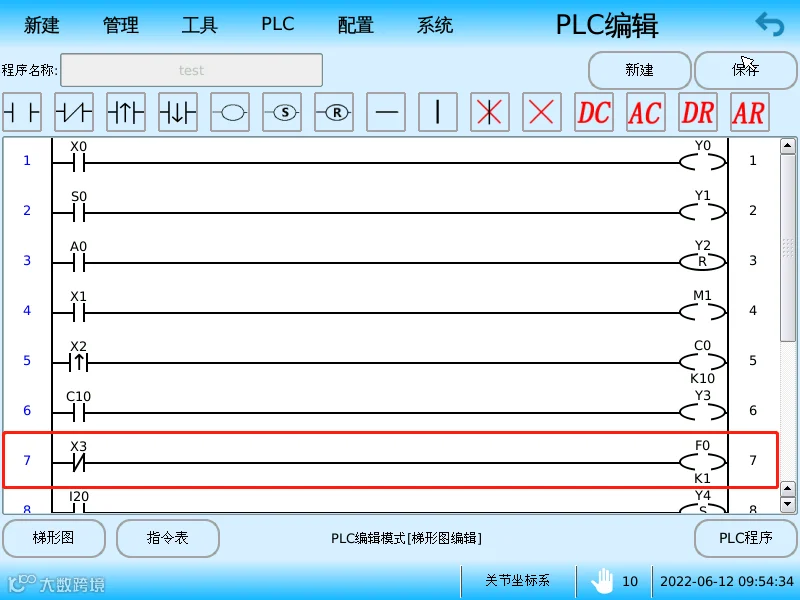
红框内梯形图逻辑效果为:
X3为高电平信号时,F0不触发。当X3信号丢失时,F0触发机器人急停。

I干涉继电器
符号定义:

干涉继电器分为“点干涉”,“空间干涉”,“轴干涉”三种类型,干涉继电器序号与干涉区功能中的序号唯一对应。
I干涉继电器仅作为梯形图输入。
例:I20对应“空间干涉区序号1”的输出状态。
路径:“工具”——“区域设置”——“干涉区”

应用案例:
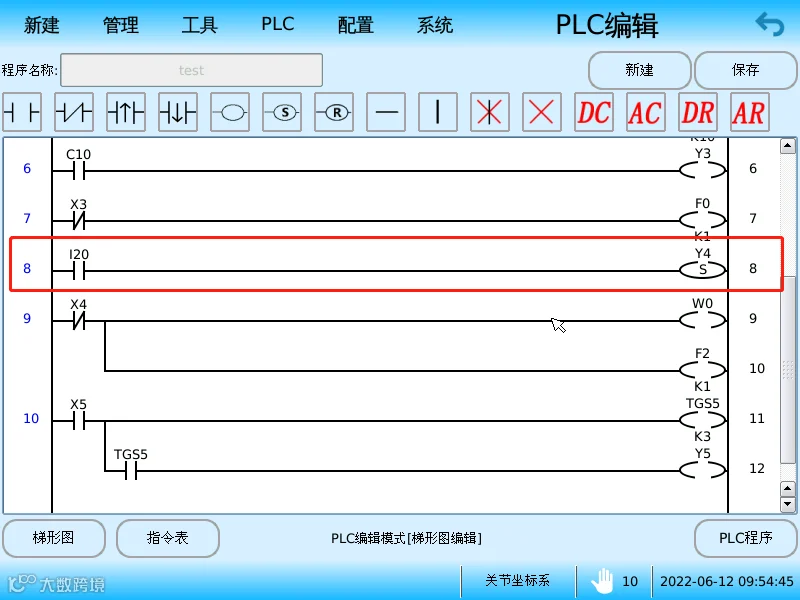
红框内梯形图逻辑效果为:
当机器人运动到“空间干涉区序号1”的干涉范围时,I20干涉继电器触发,Y3始终保持高电平输出(置位输出)。

W用户自定义报警
符号定义:

W用户自定义报警配合自定义报警功能使用,通过配置可以在示教器上个性化显示报警内容,从而快速定位报警原因。
W用户自定义报警仅作用于梯形图输出。
例:W0自定义报警设置为夹具脱落。
路径:“配置”——“自定义报警”——“添加”

应用案例:
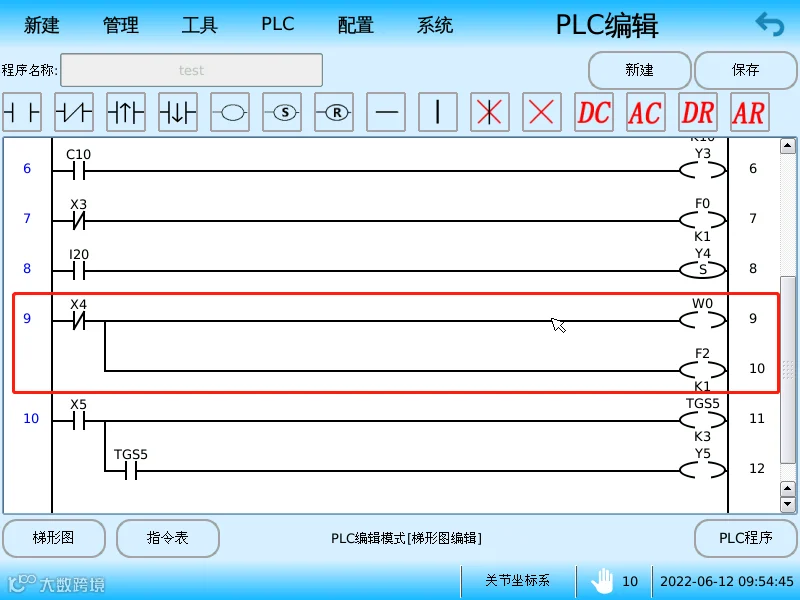
红框内梯形图逻辑效果为:
当X4信号为高电平时,W0自定义报警和F2暂停程序不触发。
当X4信号丢失时,F2触发暂停程序,并W0触发自定义报警,提示操作员排除故障。

定时器
符号定义:

通用定时器:掉电后计时清零,再次上电重新计时。
累计定时器:掉电后计时保存,再次上电后,从保存的时间开始继续计时。
累计定时器触发后将始终保持有效状态,需要进行复位才可再次定时。.
应用案例:
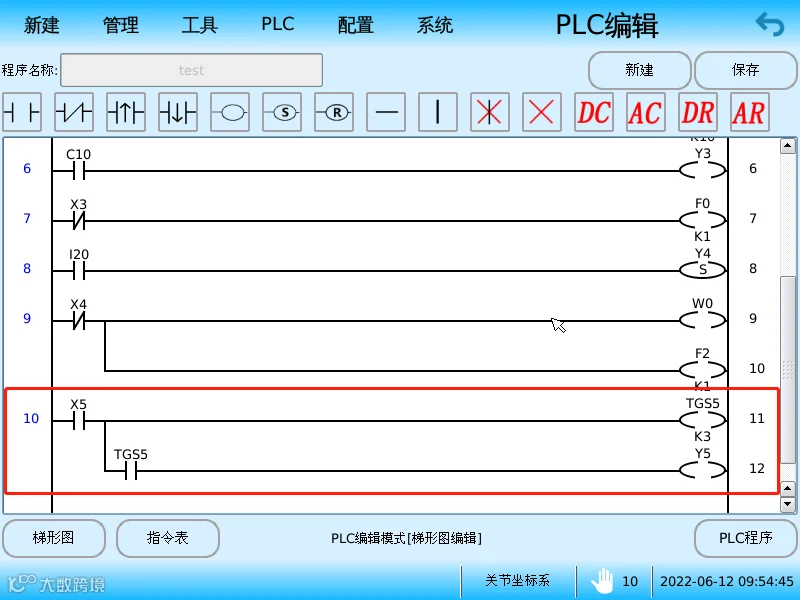
红框内梯形图逻辑效果为:
当X5触发3s后,Y5输出高电平。
参数K为定时倍数,TGS定时单位为1s,总定时时长为3s。
END
湖南博创机器人:为工业机器人植入“中国芯”
湖南博创机器人有限公司是一家专注工业机器人控制系统自主研发的高科技公司。公司自2015年成立以来,一直致力于研发具有完全自主知识产权的工业机器人控制系统。
目前,采用博创控制系统的尔必地工业机器人已经在智能制造、智慧物流、新零售、汽车制造等多个领域落地,应用范围涵盖焊接、搬运、喷涂、码垛、冲压、打磨、包装、零件分拣等等,获得客户广泛好评。
|售后专线:400-996-0731
|公司地址:湖南长沙高新开发区麓云路100号兴工科技园10栋501