
伴随着慕尼黑上海电子生产设备展第二天的尾声,研华也带来了本次展会的另一大亮点主题,揭示了研华在系统级整合、技术赋能和行业转型方面的努力,为中国半导体设备国产化进程提供了可行的路径和解决方案。

可以预见,中国的半导体设备国产化进程,既面临着像新能源汽车这样弯道超车的发展机遇,同时也堪称中国制造业近年来所面临的最为突出的一项挑战。本文通过与研华工业边缘解决方案事业群资深产品经理孙鸣聪先生的访谈,将简单分享半导体设备国产化的一些战略观点,包括对国产设备自动化应用典型痛点的理解,以及作为全球工业物联网领袖,研华如何进行行业转型,让自动化更好地服务于半导体国产化进程。
从产业思考到设备痛点
从半导体国产化战略层面来看,从硅料、硅片到晶圆制造、芯片封测,紧密结合的半导体产业链上下游,由于存在“木桶效应”,理当进行统筹与整合发展,同时进行各方面人才的积累,而不是头痛医头,言必光刻机。除了产业链环节,这种高耦合度的系统性影响还体现在具体的工序上,譬如在在半导体生产制程中,需要经过数百道晶圆加工工序,每一道工序的误差都会影响芯片最终良率。而当工序超过500道时,只有单道工序的良率超过99.99%,最终芯片良率才能超过95%。
因此,当前半导体设备的国产化进程非常需要整合产业资源进行协同,沉下心来进行技术积累,在系统架构的基础上,不断针对当前各个环节半导体设备的工艺痛点逐个突破。
精度、速度和稳定度是半导体设备最为核心的3大诉求,工艺痛点也往往围绕这几方面展开。对于完整的设备架构来说,这些核心的诉求意味着需要从软件、电控到机构进行系统级整合优化,从而真正突破设备瓶颈。
如何应对?唯有系统级解决方案
作为基于PC技术的自动化和工业物联网专家,研华首先在应对半导体行业高密度、大硅片的趋势下具有天然的工业PC技术优势。随着半导体设备核心通讯标准从SECS/GEM 200到GEM 300,数据传输的密度有了显著的提升,也更加注重与更大尺寸晶圆的兼容性和扩展性,以及支持更灵活的配置选项,因此设备自动化一方面需要更为开放、数据处理能力更强的PC控制平台,另一方面也更需要高速实时以太网技术进行支撑。
其次,从前述系统级突破国产化痛点的角度出发,研华一方面自身根据设备市场需求变化加速转型,开始深入行业技术发展投入研发,即从原先提供通用型硬件产品发展到提供垂直行业应用定制化专机,从原先提供标准控制软件功能发展到提供垂直行业应用的专用算法软件,实现从软+硬的产品提供商到软+硬+专的组合方案提供商的转型。另一方面,为更进一步帮助国产化设备的整体提升,研华进行了行业生态合作布局,结合设备商(机构硬件)、设备电控系统的其他合作伙伴,共同解决设备难点。
落地赋能,助推国产化升级
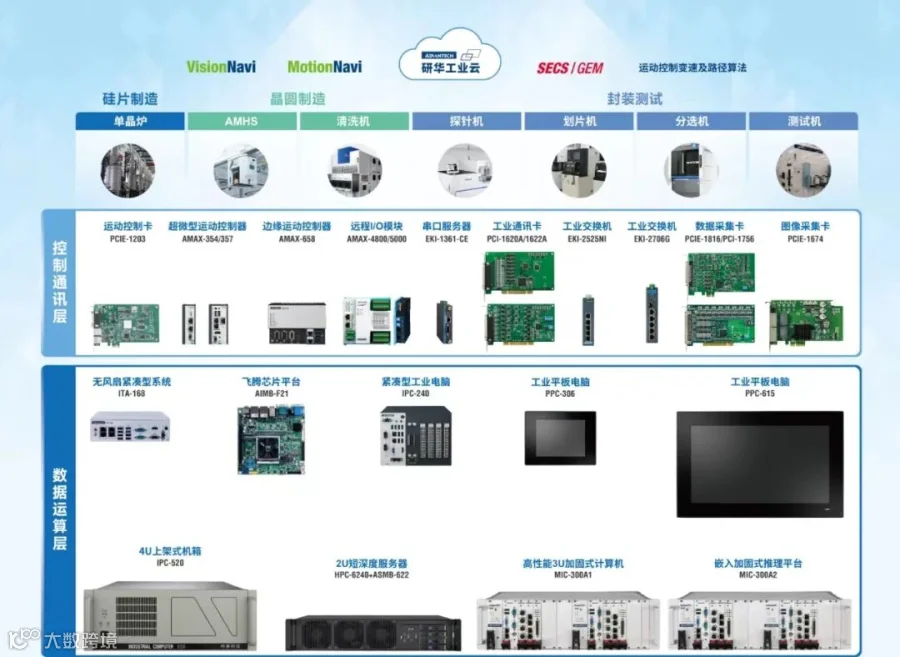
一台完整的半导体设备除了要拥有合适的数据运算层平台外,还需要搭配整体的控制及通讯系统、数据采集平台。研华提供了各种不同形态及组合的平台进行设备赋能,在数据运算层,研华有2U短深度服务器、4U上架式机箱、3U/4U紧凑型机箱、满足空间和洁净度特殊要求的无风扇紧凑型工控机以及工业平板电脑,同时业开发了面对国产化需求的飞腾芯片平台;在运动控制层除了提供了EtherCAT的运动控制卡和运动控制器, IO板和IO模块不同选择外,工程师还可以依照各自的开发习惯选择IEE61131的PLC开发环境或是以C/C++等的高级语言开发环境,尤其是面对半导体设备对精度、速度、稳定度的根本需求,提供特殊的算法开发、底层植入、软件定制等专业增值服务。对于数据采集的需求,研华更是提供了多种多样的产品,可以满足各种类型(如高速、高分辨率、高密度点位等采集)的数据获取或是控制输出要求。
在落地应用上,早已布局于半导体设备行业的研华公司,近年来在硅片制造、晶圆制造到封装测试各段工艺设备上有所建树,尤其是在中后段,研华的运动控制板卡+IPC工业电脑+上层软件再到研华工业云的强大软硬组合,完全满足了设备对大数据、高速度、高复杂度的设备控制要求。为此,研华工业边缘解决方案事业群资深产品经理孙鸣聪还专门举了2个经典案例。
01
晶圆分选机
晶圆分检机的摆臂运动是一个复杂且精细的操作流程,它涉及摆臂的快速定位、晶圆顶针扭力控制、晶圆抓取、晶圆放置和复位等一系列动作,整个运动速度可能要求每秒实现3个以上的循环周期,而且还必须确保晶圆分选的准确和安全可靠。显而易见,这除了对于控制的实时性响应有极高的要求外对于伺服马达的响应时间、自整定时间及参数的调试要求非常的高。为此研华将伺服控制指令直接下装到其运动控制板卡芯片上,大大提升本地响应速度,同时也提供上位工控机和上位软件,再整合生态合作伙伴提供的伺服电机、步进电机、DD马达、直线马达、丝杠导轨等机电产品及调教,完整提供了一套同步精度高、方便I/O扩充、布线简单又经济可靠的方案,实现了晶圆分拣机的高效稳定运转,满足工艺升级要求。
02
晶圆清洗机
通过螺旋线变速运动,晶圆清洗过程可以实现更全面、均匀的清洗效果,确保清洗过程中轨迹路径速度的一致性。然而如何精确控制摆臂、喷头等部件的运动轨迹和速度,使其按照预设的螺旋线路径进行运动却是传统PLC控制难以实现的,包括如何进行高精度轨迹控制;如何精确控制摆臂或清洗头的速度和加速度,以确保清洗的均匀性和效率;如何实现多个部件的同步等等。研华则是将直接开发好的上述底层算法嵌入到基于EtherCAT实时以太网通讯的运动控制器上,让客户在开发过程中轻松调用功能,运行中只要提供所需参数便可实现路径变速控制,硬件连接上分别连接下位的各个步进电机和上位主控PLC,不但实现了设备复杂的工艺要求,而且大大降低了方案的复杂性和成本。

不难看到,从产业统筹到设备系统再到方案整合,基于对半导体设备行业越来越深入的耕耘,研华正在进行全方位的转型和自身定位,为更好地推动中国的半导体设备国产化进程添砖加瓦。

