
点击上方蓝字关注我们

相比于特斯拉庞大的用户基数,其他的搭载智能驾驶模块的车企显然拉下一大截。这时继续依赖视觉数据的机器学习,赶上特斯拉FSD的表现是极大的困难

在朋友圈中,有几个声名显赫的“友尽话题”,比如,你相信不相信中医药,你支持俄罗斯还是乌克兰。而在技术控或者汽车迷的朋友圈里,这两年吵翻天的一个题目是:自动驾驶的未来是激光雷达技术还是纯视觉算法。
为什么大家都说特斯拉FSD视觉技术香?


特斯拉在2023年把自动驾驶技术逐渐进化到基于视觉技术的端到端深度学习。之后推出的FSD V12代,被称为自动驾驶的“ChatGPT”时刻,标志着其重大飞跃。马斯克将其描述为“端到端人工智能”,采用“视觉输入、控制输出”的方法。直接从原始输入(图像)到最终输出(控制指令),让网络自主学习整个过程。
而马斯克打个响指,在其软件上减少了30万条代码,可见其算法效率之强。
FSD的端到端学习理论上可以适应各种复杂场景,不需要为每种情况专门编程。随着数据的增加和模型的更新,系统可以不断改进,处理新的、罕见的情况。
而传统方法通常将问题分解为多个子任务(如物体检测、路径规划等),每个任务单独优化。如解析交通信号,行人机动车位置,从而制定处理规则。这使每个自动驾驶企业或主机厂,都要拥有一支庞大的自动驾驶软件工程师团队,去处理各种老的新的甚至互相矛盾的规则。
就是像老司机开车,瞅一眼周边的车辆行人,是立马该加油通过,还是点刹车让行,靠边开还是不让方向一系列动作就下意识的作出和执行。这得益于已经安装在跑在路上的几百万台特斯拉的视觉摄像头,把10亿英里海量真实世界的驾驶数据,用超过10亿参数的大规模的神经网络,从真人司机驾驶行为进行学习。
“这等于让一个有10亿英里驾驶经验的处理过各种状况的老司机,来给你开车” V12 FSD推出后,评论一片惊叹。
小鹏也背叛激光雷达了吗?


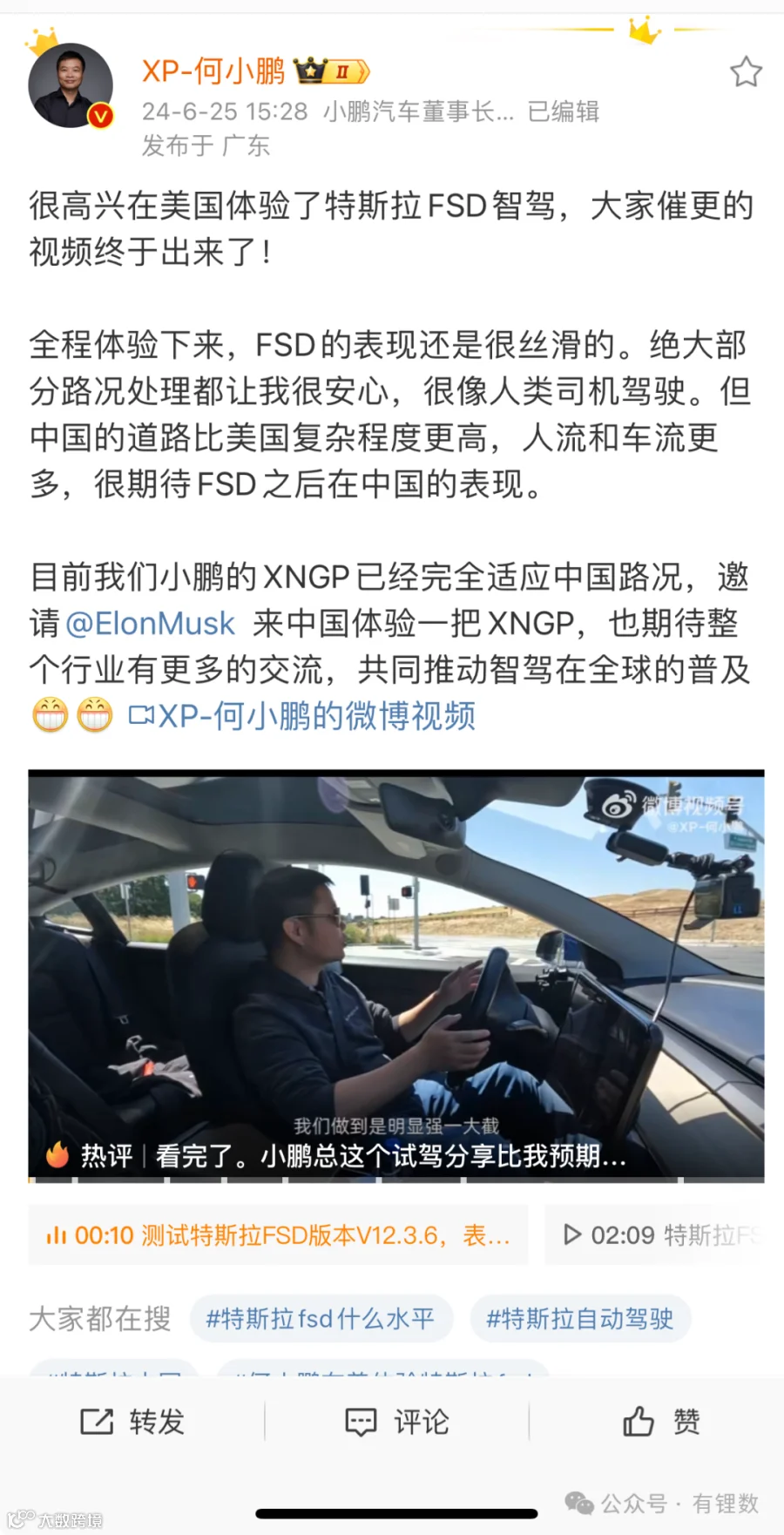
在今年6月份,何小鹏在美国体验特斯拉FSD后,发出了一条意味深长的微博。他毫无吝啬地溢美FSD “在硅谷和高速表现极好,可以达到很高的分数,很多路况处理都很丝滑。我非常感慨FSD在数月里有很大的进步”。
小鹏在国内新势力中可是自动驾驶技术的领军车企,而且被认为是“激光雷达”派的践行者。
在自动驾驶技术中,激光雷达可以通过持续扫描周围环境,生成高分辨率的三维点云图。这些点云图包含了环境中的所有物体及其相对位置,包括道路、建筑物、行人和其他车辆。自动驾驶系统利用这些数据,实时构建周围环境的详细模型,帮助车辆做出正确的决策。
激光雷达还能在恶劣天气条件下,如雨、雾和黑暗环境中,提供可靠的感知数据,确保自动驾驶系统的稳定性和安全性。这也是“激光雷达”派一致诟病“纯视觉”派的地方。
在2021年,小鹏推出了P5,这也是全球首款量产的激光雷达智能汽车。P5装载了2个车规级激光雷达,实现了多传感器的融合。其自动驾驶解决方案(XPILOT)也升级到了3.5版本,除了高速道路,更支持复杂城市道路的辅助驾驶。
因此,小鹏和特斯拉被认为是代表了两种不同的技术路线。
而在今年,据传小鹏将在下半年发布的代号为“F57”的新车,智驾系统会去掉激光雷达,搭载视觉方案以及3D毫米波雷达。这只是个别车型的差异,还是小鹏对于激光雷达技术的放弃?
相比于特斯拉庞大的用户基数,其他的搭载智能驾驶模块的车企显然拉下一大截。这时继续依赖视觉数据的机器学习,赶上特斯拉FSD的表现是极大的困难。因此国内的车企,纷纷把搭载激光雷达,过持续扫描周围环境,生成高分辨率的点云图作为感知的输入。这与特斯拉产生错位竞争,企图“弯道超车”。
可见的是,纯视觉技术,就着FSD v12 的上市,带来丝滑的用户体验,加上对比起激光雷达硬件诱人的成本优势。车企们对其把持不定是毫不意外的。
雨雪黑夜,没有激光雷达敢上路?


一个争议是在于视觉方案,在周边视线不佳之时,能否足够安全。
在昏暗环境中,激光雷达通过发射自己的光脉冲来"看清"世界,而不依赖外部光源。这意味着,即使在伸手不见五指的夜晚,激光雷达也能精确绘制周围环境的3D地图。相比之下,视觉系统在低光环境中就像戴上了墨镜的人,难以准确识别物体。
激光雷达提供的是精确的距离信息。它能直接测量到物体的距离,就像给每个物体贴上了精确的距离标签。可以快速创建周围环境的详细3D点云图。视觉系统则需要通过复杂的算法来估算距离,有点像用眼睛目测距离,准确性难免会受到影响。在雨雾恶劣天气条件下可能被严重干扰。
然而,激光雷达也并非完美无缺。极端恶劣的天气仍会影响其性能,而且它的成本和系统复杂度通常高于纯视觉系统。

现在还没有哪条路线可以完全宣称,解决了在这些场景的感知和计算。因此作为车企,大家不得不考量的是安全冗余和成本的关系。视觉系统擅长场景理解和物体识别,激光雷达擅长精确测距和3D环境mapping。两者结合可以互相补充,提供更全面的环境感知。如果一个系统失效,另一个可以继续工作,还可以通过比较两个系统的输出来检测潜在故障。
不考虑成本以及复杂度。能有多个不同传感器的感知安全冗余,肯定是解决方案需要考量的。
另外一个令很多行业内人士不安的是,深度学习是“黑盒子”,可解析性差。“老司机”在开车时往往不是一板一眼的按照书本上的交通规则。有些场合是需要有灵活度的,象前方意外事故造成车道被占必须跨越双黄线……这些都被FSD端到端学习出来了。品一下,这是否有点象《终结者》里头进化出自我意识后,对人类发动核打击的”天网“?
激光雷达已经降到白菜价了,视觉派还能打吗?


“纯视觉”派的一个很重要的观点是,激光雷达太贵了,搭载上车没有竞争力。
曾经,Velodyne的64线机械激光雷达售价曾高达8万美元,32线产品约2万美元。到了2024年,禾赛科技CEO李一帆表示,激光雷达的成本已经降到了3200元人民币,相比2019年的平均售价1.74万美元(约12万人民币)有了巨大的降幅。
这得益于技术进步,也来自市场的超高速成长带来的规模经济。预计到2025年,中国激光雷达市场规模将达到43.1亿美元,较2019年实现63.1%的年均复合增长率,其中车载领域即无人驾驶和高级辅助驾驶会是主要组成部分。
即使激光雷达变得非常便宜,纯视觉路线的车企是否采用它,作为辅助或者技术冗余,将取决于多个因素。
已经在纯视觉系统上投入大量资源的公司可能不愿意改变方向,以保持其技术路线一致性。添加新的传感器会增加系统复杂性,可能需要重新设计算法和架构。还包括处理额外的激光雷达数据需要更强的计算能力,可能增加成本。从物理上看激光雷达的物理存在仍可能影响车辆设计和空气动力学,特别在纯电车型设计上,风阻系数是工程师极端关注的指标。
但激光雷达可以提供精确的3D环境信息,特别是在夜间或恶劣天气条件下。增加一个额外的传感器系统可以提供更好的冗余,增强系统的鲁棒性。
目前NOA也好, FSD也好,都是L2的技术。说来不是自动驾驶,只是辅助驾驶。对于Level 3以上自动驾驶是否必须要用激光雷达,业内也是争翻天的。

END

公众号:有锂数
关注 了解更多内容
点个在看,你最好看
