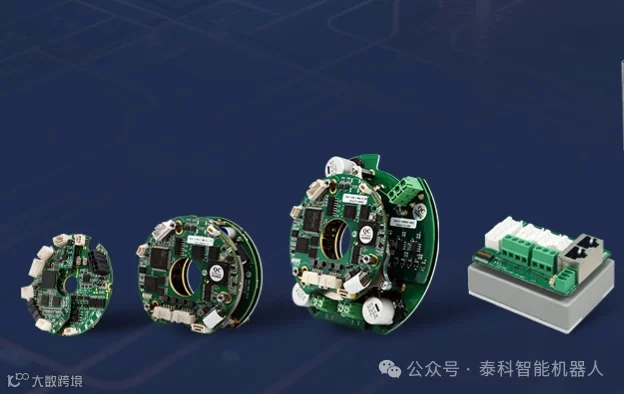
泰科一直致力于伺服系统的研发和生产,从08年成立至今,推出了许多工业自动化经典伺服系统,为了满足客户在机器人特别是协作机器人领域的需求,泰科迅速组织力量立项研发,2016年就推出了适用协作机器人关节模组的直流伺服驱动器--RDM系列,而后继续研发,推出了改进版本RDM2系列。
2016年以来,针对协作机器人及人形机器人等对大功率、高功率密度的极限需求,持续开发出ADM、RDM2、RGT等系列伺服驱动,最高功率可达5KW,电流可达80A,能量转换效率高达95%以上,一经面世,就成为热销产品,收到客户好评和持续下单。
一、RDM2协作机器人关节伺服驱动

RDM2协作机器人关节伺服驱动模块是一款基于当前最先进的 FPGA 技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen 总线控制伺服电机的位置、速度、转矩,大大的降低了EtherCAT/CANopen 总线多轴系统中每一个节点的成本。RDM驱动模块作为一个EtherCAT/CANopen从站,以DSP-402的CoE 协议运行,支持位置/速度/转矩周期同步、位置/速度/转矩曲线、PVT、回原点模式。通过 RS232 或 EtherCAT 通信接口与 PC 软件,可以编程设置调整系统参数,升级固件,保存或读取配置参数。
目前,RDM2伺服驱动已经大面积应用于我司各类型协作机器人,涉及医疗、电力、3C电子、新能源汽车等许多领域。
二、RGT协作机器人关节伺服驱动

RGT 是一款采用先进控制和功率转换技术实现的高性能、直流供电、结构及其紧凑的全数字通用伺服驱动器,最大功率可达 5000W,可以很好地满足您对高精度、运行平稳、快速反应、力矩控制的要求。典型应用于协作机器人、医疗、自动化设备等高精度工作场景。RGT 驱动模块全面兼容标准 EtherCAT 协议,支持 CiA402 规格所有 CoE 模式及 EtherCAT 各项命令模式,支持同步周期(CSP,CSV,CST)模式,支持分布式时钟功能等,可实现多个伺服精准同步,让协作机器人开发变得更加快速便捷,安全稳定,智能精准。
该驱动已经成为我司TB6、TC6、DR双臂机器人官方采用的伺服驱动,实现优秀的性能指标,销售的协作机器人高达2000+,广泛应用于医疗手术、康复、半导体、新能源汽车、教育科研等领域。
三、ADM系列可插入式全数字直流伺服驱动器
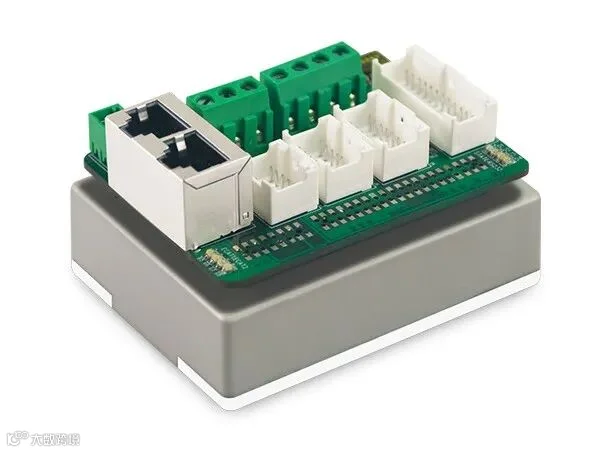
ADM系列可插入式驱动模块是一款基于当前最先进的 FPGA 技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1200W。支持RS232, EtherCAT ,CANOPEN总线通信,应用软件编程、设置、调整系统参数,升级固件,保存或读取配置驱动器参数,控制伺服电机的位置、速度、转矩。
该驱动广泛应用于工业自动化及协作机器人产品,成熟、可靠,自研发量产后,持续出货已达10000+。
至此,泰科伺服全面发力工业自动化及协作机器人产业,提供了几大系列产品,性能指标完全可以媲美国际顶级水平,满足不同领域、不同行业的实际需求,将伺服领域积累的尖端技术逐步下放,让客户可以轻松定制、组装的工业自动化设备及协作机器人产品,为国内智能制造、机器人国家战略奉献自己的力量。
 泰科机器人
泰科机器人