
Robot‑foal 作为德泰高科面向政务、轨道交通、产业园区等公共大厅场景的旗舰智能服务机器人,其底层代码采用端边云协同分层架构,以高实时性、高鲁棒性、场景可定制为核心设计目标,支撑语音交互、自主导航、多场景适配、7×24 小时值守等关键能力。本文从架构分层、核心模块代码逻辑、关键技术实现、场景定制机制四个维度,对其底层代码进行完整解析。
一、整体底层代码架构
Robot‑foal 底层采用四层解耦架构,代码语言以C/C++(底层实时控制)+ Python(AI 算法)+ Kotlin/Java(应用交互) 混合编写,通过中间件实现跨语言、跨进程通信,保障系统稳定性与扩展性。
硬件驱动层(Kernel/Driver)
1、负责传感器、电机、麦克风阵列、屏幕等硬件的底层驱动与数据采集
2、基于RT‑Thread/FreeRTOS实时内核,确保运动控制、急停等关键指令微秒级响应
3、代码特点:硬件抽象化(HAL)设计,屏蔽硬件差异,便于快速迭代硬件平台
核心服务层(Core Service)
1、机器人 “大脑”,承载导航、语音、决策、任务调度四大核心引擎
2、采用数据流驱动架构,模块间通过共享内存零拷贝通信,降低延迟
3、场景应用层(Scene Application)
4、面向政务、地铁、园区等场景的业务逻辑封装,提供插件式加载能力
5、支持热更新,无需重启机器人即可切换场景服务流程
云端协同层(Cloud Sync)
1、负责知识库更新、远程运维、数据上报、OTA 升级
2、采用MQTT+RESTful双协议,兼顾实时性与批量数据传输
二、核心功能模块底层代码解析
(一)智能语音交互引擎代码逻辑
支撑98% 识别准确率、0.3 秒响应、方言适配、噪音环境降噪等核心指标。
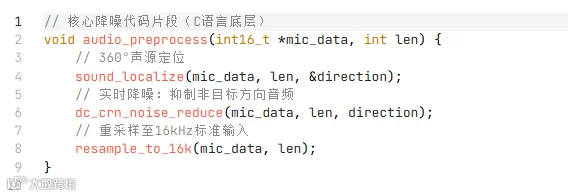
音频预处理模块
1、采用环形麦阵列 + DC‑CRN 深度降噪算法,代码实现声源定位与噪音过滤
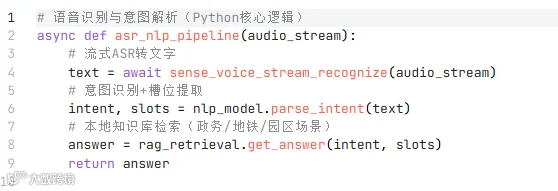
ASR+NLP 一体化推理
1、端侧部署轻量化大模型,结合RAG 检索增强,避免通用模型 “幻觉”
2、代码采用流水线异步推理,语音边采集边识别,降低响应延迟
多轮对话管理
1、基于Lua 脚本实现对话状态维护,支持热更新对话逻辑,无需发版
(二)自主导航与运动控制代码逻辑
支撑厘米级定位、自主避障、智能巡航、路径引领、7×24 小时稳定运行。
激光 SLAM 建图与定位
1、底层采用C++ 实现的 GMapping/LOAM 算法,实时构建大厅地图
2、代码融合雷达 + 视觉 + 里程计多传感器数据,提升复杂环境鲁棒性
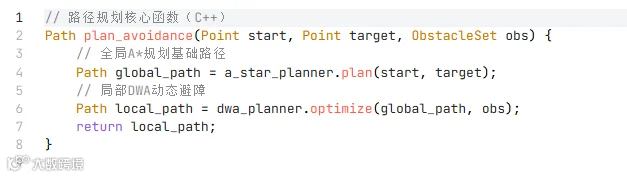
动态路径规划
1、采用A * 算法 + DWA 动态窗口法,实时避障并规划最优路径
运动控制闭环
1、底层PID 控制器驱动电机,代码实现直线、旋转、差速转向精准控制
2、硬件中断级急停逻辑,保障人机安全
(三)场景化服务与任务调度代码逻辑
支撑政务、地铁、医院、园区多场景一键切换,是 Robot‑foal 规模化落地的核心代码设计。
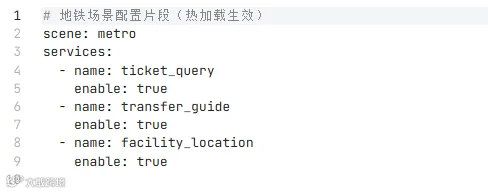
场景插件化框架
1、采用YAML 配置 + 动态链接库(SO) 加载场景逻辑,解耦核心系统与业务
任务调度中心
1、基于优先级队列管理迎宾、咨询、引领、巡航等任务
2、代码支持任务抢占、中断恢复、异常重试,保障服务不中断
7×24 小时值守机制
1、底层看门狗 + 进程保活代码,防止系统卡死
2、低电量自动回充、休眠唤醒逻辑全由底层状态机控制
三、关键底层技术代码实现要点
1. 端云协同 RAG 知识库
底层代码将政策文件、业务流程、换乘信息向量化存储
问答优先检索本地知识库,再由大模型生成自然语言回答,确保准确可溯源
2. 多场景自适应代码
硬件参数、交互话术、服务流程均通过配置中心动态下发
同一台机器人可在政务大厅、地铁枢纽、产业园区快速切换身份
3. 高可用与稳定性设计
核心服务双进程守护,一个进程崩溃另一个立即接管
日志系统分级存储,支持远程诊断与问题回溯
四、代码架构优势与落地价值
1、解耦设计:底层代码与上层业务分离,二次开发门槛低
2、实时性强:运动控制、语音响应均达毫秒级,适配大厅高人流场景
3、定制灵活:泽高电子等合作伙伴可快速定制轨道交通等垂直场景版本
4、稳定可靠:7×24 小时不间断运行代码设计,满足公共服务刚需
五、总结
Robot‑foal 大厅智能服务机器人的底层代码,是一套面向公共服务场景深度优化的工业级机器人软件体系。它以分层解耦、数据流驱动、端云协同为架构根基,用 C/C++ 保障实时控制、用 Python 支撑 AI 智能、用配置化实现场景定制,最终实现 “灵动交互、精准导航、稳定服务、全域适配” 的产品能力,为轨道交通、智慧政务、产业园区等场景的智能化升级提供了坚实的代码底层支撑。