
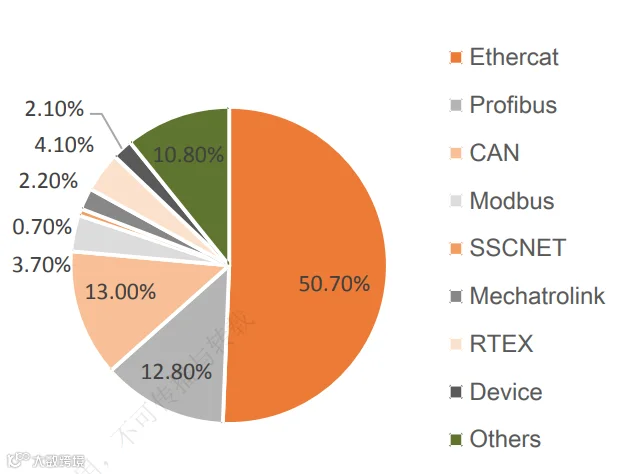
在工业自动化领域,EtherCAT(Ethernet for Control Automation Technology)作为一种高效的工业以太网协议,以其出色的实时性能、灵活的拓扑结构和强大的扩展能力,成为众多伺服驱动与步进驱动产品研发的首选。

一、项目筹备与需求分析
产品研发的第一步是明确项目需求。这包括了解目标市场的应用需求、确定产品的性能指标(如速度、精度、负载能力等)、以及选择合适的硬件平台。在伺服驱动与步进驱动的研发中,EtherCAT协议的支持是核心要求,因此需选择支持EtherCAT协议的伺服电机和步进电机,以及相应的驱动器。
二、硬件设计与选型
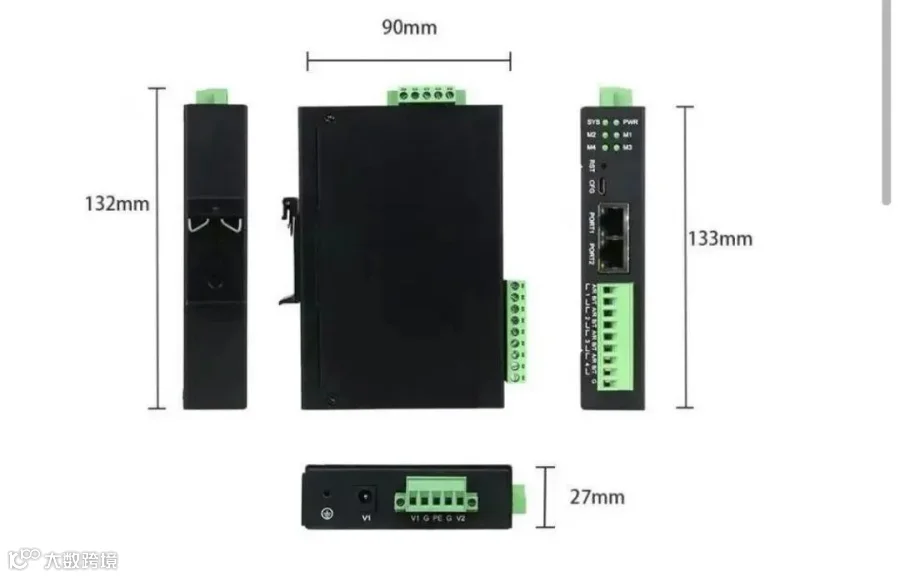
硬件设计是产品研发的关键环节。在伺服驱动方面,需选择高性能的伺服驱动器,确保其支持EtherCAT通信协议,并具备足够的功率和扭矩以满足应用需求。步进驱动方面,则需选择具有高分辨率、低噪音和良好稳定性的步进驱动器。此外,还需考虑电源管理、散热设计、接口连接等细节,确保硬件系统的可靠性和稳定性。

三、软件平台搭建与配置
软件平台是EtherCAT伺服驱动与步进驱动产品研发的灵魂。首先,需搭建支持EtherCAT协议的编程环境,如使用欧姆龙的Sysmac Studio、倍福的TwinCAT等。在软件环境中,需导入伺服驱动器和步进驱动器的ESI(EtherCAT Slave Information)文件,该文件包含了设备的通信参数和PDO(Process Data Object)映射信息。通过配置PDO映射,可以确保主站与从站之间的数据通信高效、准确。

四、运动控制算法实现
运动控制算法是伺服驱动与步进驱动产品的核心。在伺服驱动中,需实现速度控制、位置控制和力矩控制等算法,以确保电机能够按照预定的轨迹和速度运行。步进驱动则更注重步进角的精确控制和步进速度的平滑调节。在算法实现过程中,需充分利用EtherCAT协议的高实时性,确保运动控制的准确性和稳定性。

五、系统调试与优化
系统调试与优化是产品研发的必经之路。在调试阶段,需对伺服驱动器和步进驱动器进行单独的功能测试,确保其能够正确响应主站的指令。随后,需进行联合调试,验证主站与从站之间的通信是否顺畅、数据是否准确。在优化阶段,需根据测试结果调整PDO映射、优化运动控制算法、提高系统的实时性和稳定性。此外,还需考虑系统的抗干扰能力和容错机制,确保产品在实际应用中能够稳定运行。
六、产品测试与认证
在产品研发的最后阶段,需对产品进行全面的测试与认证。这包括性能测试(如速度、精度、负载能力等)、可靠性测试(如长时间运行、高温环境测试等)以及安全认证(如CE、UL等)。通过测试与认证,可以确保产品符合相关标准和要求,为产品的市场推广打下坚实的基础。
EtherCAT伺服驱动与步进驱动产品的研发是一个复杂而系统的过程,需要综合考虑硬件设计、软件平台搭建、运动控制算法实现、系统调试与优化以及产品测试与认证等多个方面。通过科学的方法和严谨的态度,可以开发出高性能、高可靠性的伺服驱动与步进驱动产品,满足工业自动化领域的广泛应用需求。
交流微(EtherCAT18),开发板只有一套,但是资料可以免费送😂