视频推荐





 工业机器人解决方案
工业机器人解决方案

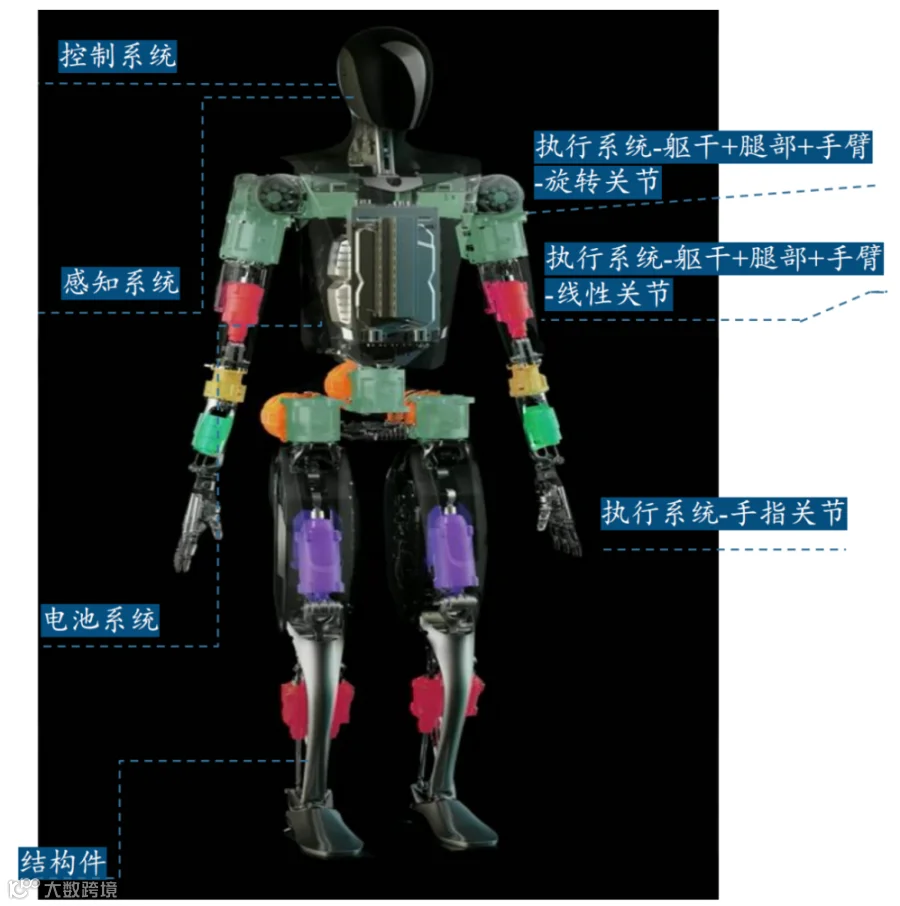
超高速通讯与超低延迟:EtherCAT充分利用了以太网的高速传输特性,实现了数据点的实时或近实时传输,为机器人提供了无与伦比的数据处理速度和反应能力。这使得人形机器人在执行复杂任务、进行精准操作以及快速响应环境变化时能够展现出更加流畅、自然的动作表现。
高度灵活性与拓扑多样性:EtherCAT支持多种网络拓扑结构,包括线性、树状、星形等,为设计者提供了极大的灵活性。这种灵活性使得人形机器人可以根据实际需求灵活配置网络结构,优化数据传输路径,提高系统整体性能。
高可靠性与冗余设计:EtherCAT总线具备高可靠性和冗余设计特性,能够在网络故障发生时迅速恢复通信,确保机器人任务的连续性和稳定性。这对于需要长时间运行且对可靠性要求极高的应用场景尤为重要。
 致远电子MiniPCIe-2E EtherCAT主站通讯卡的创新突破
致远电子MiniPCIe-2E EtherCAT主站通讯卡的创新突破
作为智能制造与机器人控制领域的领先企业,致远电子敏锐洞察行业发展趋势,推出了MiniPCIe-2E EtherCAT主站通讯卡。这款通讯卡在继承EtherCAT总线技术优势的基础上,进一步实现了体积、集成度、易用性等方面的创新突破。
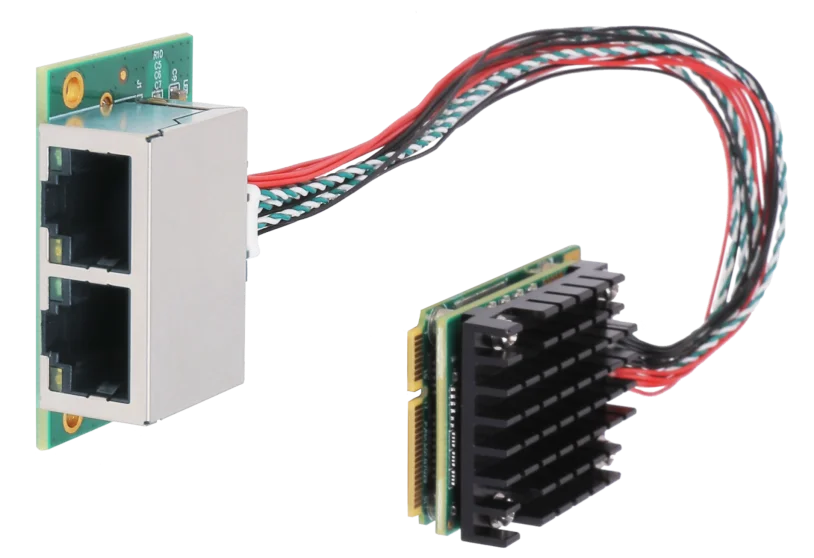
极致小巧的体积与高度集成:采用Mini PCIe标准尺寸设计,使得通讯卡能够在有限的空间内实现高效部署。其高度集成的硬件设计不仅优化了空间利用率,还提升了数据传输效率与稳定性。
卓越的通讯性能:支持EtherCAT通讯协议,确保数据传输的高速、实时与精准。微秒级的控制周期为人形机器人提供了极致的响应速度与精度保障。
高可靠性与冗余支持:经过严格测试验证的通讯卡能够在恶劣的工业环境中稳定运行。同时,支持EtherCAT线缆冗余功能进一步提升了系统的容错能力与通信可靠性。简洁明了的配置与调试:提供AWStudio(运动控制版本)等配套软件工具,用户可轻松完成设备的扫描、配置与调试工作。快速实现快速部署与高效运维。
人形机器人行业的蓬勃发展与EtherCAT通讯技术的核心驱动力相辅相成、相互促进。致远电子 MiniPCIe-2E EtherCAT主站通讯卡 作为这一领域的创新成果之一,将为推动人形机器人技术的进一步发展与普及贡献重要力量。
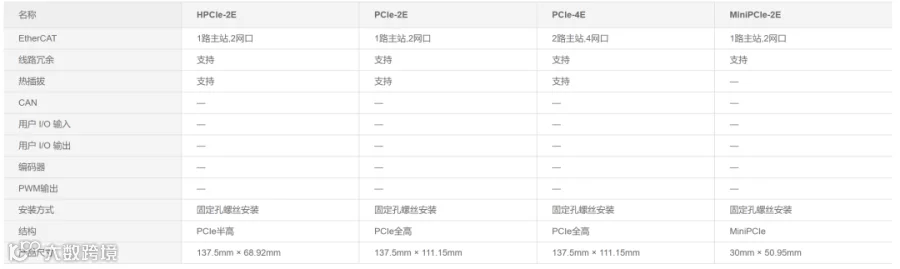
表1 PCIe EtherCAT主站通讯卡选型表
EtherCAT 系列文章
【新品上市】ZMC900E 国产高性能EtherCAT总线控制器
【新品上市】ZLG致远电子PCIe EtherCAT通讯卡产品正式发布!
【技术分享】手把手带你入门AWStudio运动控制编程
【技术分享】面对快速迭代的技术,怎能忽视设备升级的高效与灵活性?
【技术分享】灵活连接,无限可能—探索EtherCAT的拓扑艺术
【技术分享】EtherCAT技术赋能工业储能,优化GOOSE网络实时性与效率
【技术分享】人形机器人时代已来,解锁未来智能奥秘
【技术分享】EtherCAT 分布式时钟简介
【200个电机驱动】如何实现EtherCAT分布式供电?
【200个电机驱动】如何同步运行?--基于EtherCAT的柔性电机驱动系统
【200个电机驱动】如何快速搭建柔性自动生产线?
【插针机PLC开发】用AWBlock开发运动逻辑
【插针机HMI开发】用AWTK开发人机界面
【技术分享】EtherCAT 数据帧格式和寻址方式简介
【技术分享】“脱胎换骨”--插针机运动控制
【技术分享】EtherCAT总线如何对从站固件进行升级?
【技术分享】EtherCAT冗余技术如何实现通信线缆断开的补救?
【技术分享】如何精准分析人形机器人运动数据?
【技术分享】为何EtherCAT在运动控制总线中如此受欢迎?
【产品应用】ZMC600E运动控制器直线和圆弧插补算法详解
【产品应用】ZMC600E运动控制器T型、S型速度规划详解
【产品应用】使用PCIe EtherCAT通讯卡控制IO从站step by step(一)
【产品应用】使用PCIe EtherCAT通讯卡控制IO从站step by step(二)
【产品应用】ZMC900E控制器之ROS2环境安装指南
【产品应用】EtherCAT主站控制器系统实时性测试
【产品应用】ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改
【产品应用】ZMC300E EtherCAT主站控制器实现复杂的运动轨迹规划原理及应用
【产品应用】手把手带你使用ZMC300E绘图
【产品应用】三个步骤,让你的EtherCAT电机转起来
【产品应用】EtherCAT如何保障高效率、高实时性、高灵活性的现场总线通讯
【产品介绍】ZMC601E总线型边缘控制器 — 引领制造型企业数字化转型
【产品介绍】ZMC600E EtherCAT主站控制器全新上市
【产品介绍】ZLG推出新一代工业机器人解决方案,为工业机器人注入新的活力