
安川伺服驱动免调整功能详解
安川伺服驱动免调整功能是一种先进的技术,旨在简化伺服系统的调试和优化过程,提高系统的响应速度和稳定性。以下是对该功能的详细解析,包括原理、技术实现过程、代码实现以及应用效果。
1. 原理
伺服驱动免调整功能主要通过自动调整伺服系统的参数来实现最优性能。这些参数包括速度环增益、积分和位置环增益、扰动观测器参数等。通过自动计算这些参数,系统能够适应不同的负载和工作条件,从而实现免调整。
2. 技术实现过程
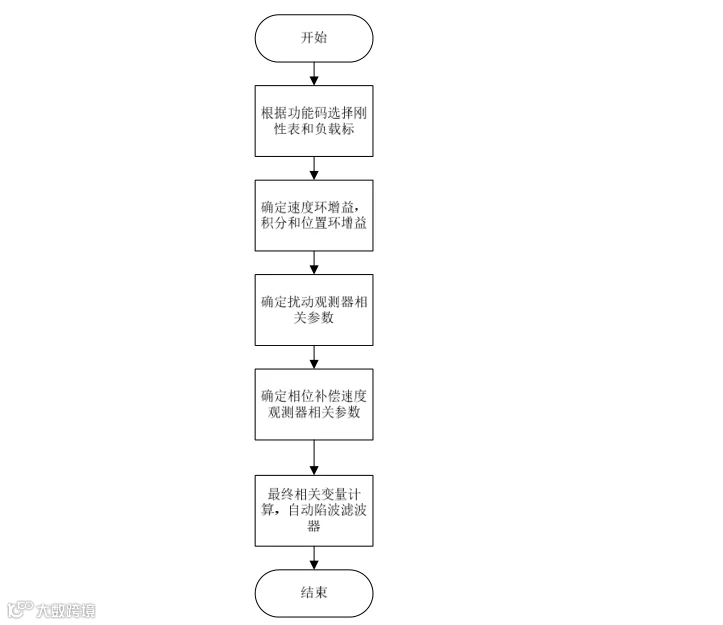
根据提供的流程图和参数设置,技术实现过程可以分为以下几个步骤:
选择刚性表和负载标:
根据功能码选择相应的刚性表和负载标,以确定系统的初始参数。确定速度环增益、积分和位置环增益:
计算速度环增益、积分和位置环增益,以优化系统的动态响应。确定扰动观测器相关参数:
计算扰动观测器的增益和滤波器参数,以提高系统的抗干扰能力。确定相位补偿速度观测器相关参数:
计算相位补偿速度观测器的增益和滤波器参数,以提高系统的相位响应。最终相关变量计算,自动陷波滤波器:
计算最终的相关变量,并设置自动陷波滤波器,以消除特定频率的干扰。
3. 代码实现
以下是根据提供的参数设置和公式进行代码实现的示例:

# 相位补偿速度观测器相关参数
ks_vobs =60
kj_vobs =100
# 相位补偿速度观测器LPF时间常数[0.01ms]
vobsLpf =64000000/(VOBSLPFGNHZ * kv)
vobsLpf =64000000/(DISOBSFSTD / TUNELESSRAT * kv)
vobsLpf =64000000/(kv *6000/30)
# 前馈相关参数
vffPhCmpFrq1 =12800/ vobsLpf
vffPhCmpFrq2 =10000
# 扭矩滤波器相关参数
# 包括两个一阶低通滤波器,一个时间常数时Pn401,一个时间常数是0.1ms
# 扰动观测器相关参数
kj_dist2 = kj_dist * Stiff /100
# 输出参数
print(f"ks_vobs: {ks_vobs}")
print(f"kj_vobs: {kj_vobs}")
print(f"vobsLpf: {vobsLpf}")
print(f"vffPhCmpFrq1: {vffPhCmpFrq1}")
print(f"vffPhCmpFrq2: {vffPhCmpFrq2}")
print(f"kj_dist2: {kj_dist2}")4. 应用效果
通过实现上述免调整功能,伺服系统能够自动适应不同的负载和工作条件,从而实现以下效果:
提高系统的响应速度:通过自动调整参数,系统能够更快地响应负载变化。
提高系统的稳定性:通过优化参数,系统能够更好地抵抗外部干扰。
简化调试过程:用户无需手动调整参数,系统能够自动优化性能。
提高生产效率:减少调试时间,提高生产线的效率。
安川伺服驱动免调整功能通过自动调整参数,显著提高了伺服系统的性能和稳定性,简化了调试过程,提高了生产效率。