
在精密伺服控制系统中,位置控制精度与动态响应速度的平衡始终是核心技术追求,双编码器配置通过功能分工与协同工作,完美解决了传统单编码器系统中“电机控制精度”与“负载定位精度”难以兼顾的痛点。其核心逻辑在于将电机本体控制与负载终端控制分离,通过主、辅双编码器分别提供精准反馈,构建多层次闭环控制架构,最终实现兼具高速响应与微米级定位的控制效果。
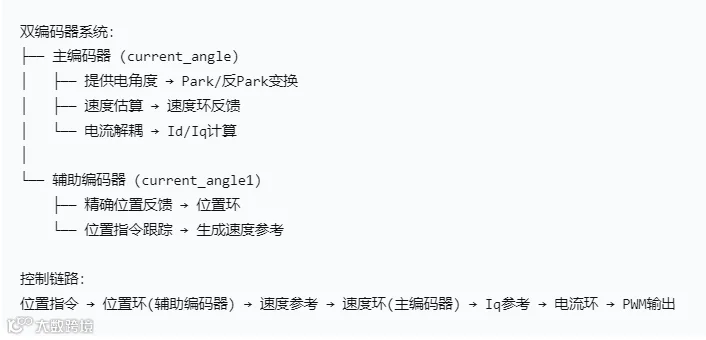
主编码器作为电机端的“核心感知单元”,直接安装在电机轴端,承担着电机本体控制的关键反馈任务。其通常具备高分辨率(如14位分辨率对应16384线)与圈数计数功能,通过`encoder_cnt_14bit = (cyclenum_angle<<14)+current_angle`等代码逻辑,实时采集电机机械角度并换算为电气角度,为矢量控制(FOC)提供核心数据支撑。在控制流程中,主编码器的核心作用体现在三方面:一是通过`QEP_MACRO(&qep1)`计算精准电角度,为Clark、Park变换提供基础,实现三相电流向旋转坐标系下Id(励磁电流)和Iq(转矩电流)的解耦;二是通过脉冲差值估算电机实时速度,为速度环反馈提供高频响数据;三是保障电流环的动态性能,通过精准角度反馈实现转矩与磁场的独立控制,让电机输出稳定且快速的转矩响应。
辅助编码器则作为负载端的“终端定位传感器”,安装在负载侧或传动链末端,直接测量负载的实际位置,彻底规避了机械传动环节的误差干扰。传统单编码器系统中,齿轮箱的间隙、皮带的弹性变形、传动件的磨损等都会导致“电机位置”与“负载位置”出现偏差,而辅助编码器通过`end_encoder_cnt_14bit = (cyclenum_angle1<<14)+current_angle1`直接采集负载位置,使位置环反馈数据直达控制对象,实现真正意义上的全闭环控制。其核心价值在于将位置控制的“反馈点”从电机端转移到负载端,让控制指令与实际控制效果形成精准闭环,从根源上消除传动误差对定位精度的影响。
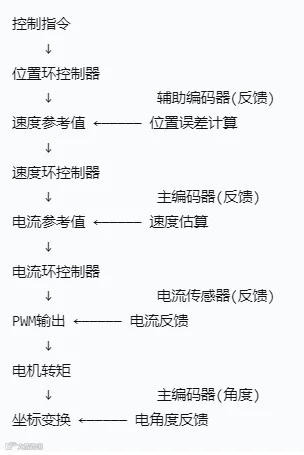
双编码器系统的控制架构遵循“外环位置、中环速度、内环电流”的分层设计,各环节通过明确的信息流实现协同控制。位置环作为最外层控制,以辅助编码器反馈的负载实际位置为依据,与期望位置指令计算位置误差。在代码实现中,通过`pos_diff = ((int64_t)(cmd_end_encoder>>2)) - ((int64_t)(end_encoder_cnt_14bit>>2))`对14位编码器数据进行分辨率适配后,利用PD控制器生成速度参考值`SpeedRef = ((float)((pos_diff)))*P_ctrl + speed1.Speed*D_ctrl`,并通过速度限幅保障控制安全性。这一环节的核心目标是实现负载位置的精准追踪,不受传动系统干扰。

速度环作为中间协调层,承接位置环输出的速度参考值,以主编码器估算的电机速度为反馈,通过PID控制器输出转矩电流参考值(Iq参考)。代码中`pid1_spd.term.Ref = SpeedRef`与`pid1_spd.term.Fbk = speed1.Speed`明确了速度环的输入输出逻辑,其中主编码器提供的高频速度反馈是保障速度环带宽的关键——电机端直接测量的速度数据响应快、噪声低,能够快速跟踪速度参考变化,避免负载端位置出现超调或振荡。速度环的核心作用是将位置控制的“位置需求”转化为电机的“速度需求”,同时抑制速度波动,为位置环提供稳定的内层支撑。

电流环作为最内层控制,是实现电机高性能驱动的核心,其运行完全依赖主编码器提供的电角度数据。在控制流程中,电流传感器采集的三相电流经Clark变换转换为α-β坐标系电流,再结合主编码器的电角度通过Park变换转换为Id、Iq电流。代码中`park1.Angle = qep1.ElecTheta*6.2831853f`明确了电角度对坐标变换的支撑作用,随后通过PID控制器分别对Id和Iq进行闭环控制,输出Vd、Vq电压指令,经反Park变换和SVPWM生成驱动电机的PWM波。电流环的响应速度最快,能够在微秒级调节电机电流,实现转矩的快速控制,同时通过Id=0的控制策略(或弱磁控制)优化电机运行效率,为速度环和位置环提供强大的动态转矩支撑。
双编码器系统的协同优势在实际应用中尤为突出:主编码器专注于电机本体的动态控制,保障电流环和速度环的高带宽与快响应,让电机具备出色的转矩输出能力和速度调节性能;辅助编码器专注于负载位置的精准测量,消除传动误差,实现负载的高精度定位。这种“分工明确、协同互补”的设计,使系统既能够应对高速动态工况(如工业机器人的快速启停),又能满足高精度定位需求(如数控机床的微米级加工)。

在代码实现层面,双编码器的功能分离与协同控制得到了充分体现:主编码器(qep1)贯穿FOC算法的坐标变换、速度估算和电流环控制全过程,是电机驱动的核心反馈源;辅助编码器(end_encoder_cnt_14bit)仅作用于位置环的误差计算和速度参考生成,聚焦负载定位精度。同时,系统通过校准逻辑建立主编码器与电机电气角度的对应关系,通过模式判断(ctrl_mode)实现位置、速度、电流三种控制模式的切换,确保双编码器在不同工况下都能高效工作。
双编码器伺服驱动系统通过主、辅编码器的功能分工与三层闭环控制架构,实现了动态性能与定位精度的双重突破。其核心价值在于将“电机控制”与“负载控制”解耦又协同,既发挥了主编码器在电机本体控制中的高频响优势,又利用辅助编码器消除了机械传动的固有误差,最终在数控机床、半导体设备、工业机器人等高精度应用场景中,实现了兼具高速响应与微米级定位的高性能控制效果,成为现代伺服驱动技术的核心解决方案之一。