分享是最大的支持,关注是最好的鼓励


(1)针对钻锚机器人多机械臂与多钻机的最优布局问题,建立了基于时空约束的最优配置模型,得出了复杂空间下机械臂与钻机最优配置,能够实现可达空间和可操作性指标下钻锚机器人的最优空间布局。
(2)针对钻锚机器人机械臂姿态控制问题,提出了基于SqueezeNet网络深度学习的机械臂抓取定位方法,能够实现抓取点在物料上的准确识别和定位;提出了基于模糊控制的抓取力自适应控制方法,能够实现机械臂面向多种物料的稳定夹持;提出了基于最小线段插补算法的机械臂姿态规划方法,能够实现有限空间条件下的机械臂小范围位姿规划;提出了基于强化学习的机械臂姿态控制策略,实现了钻锚机器人机械臂最优姿态控制。
(3)针对钻锚机器人避障轨迹规划问题,构建了钻锚机器人工作空间模型,能够实现工作环境信息汇总及实时更新;提出了机械臂可行域求解模型,实现了机械臂可行域在多种约束下的实时求解;提出多种混合算法结合的机械臂最优轨迹规划方法,实现了机械臂实时碰撞检测和最优轨迹规划。
(4)针对钻锚机器人多机械臂与多自动钻机并行协同控制问题,建立了钻锚工艺驱动模型和基于时间最优的多机多任务分配模型,通过机械臂可行域更新模型和奖惩机制对控制策略进行迭代更新,结合任务分配模型和收益评价模型,提出了一种基于智能学习算法的钻锚机器人协同控制方法,能够实现钻锚机器人多机械臂多自动钻机系统的智能协同控制和并行作业。
作者:马宏伟1,2,孙思雅1,王川伟1,2,毛清华1,2,薛旭升1,2,王 鹏1,2,夏 晶1,2,贾泽林1,郭逸风1,崔闻达1
单位:1.西安科技大学 机械工程学院;2.陕西省矿山机电装备智能检测与控制重点实验室
近年来,国家和煤炭行业采取有效措施,强力推进煤矿巷道掘进工作面的智能化,使得“采快掘慢” 严重失衡问题得到有效缓解,但“ 掘快支慢” 的难题仍亟待破解。 为了提高永久支护的效率,国内外学者和相关企业先后成功研发了具有环形锚杆仓的自动钻锚台车、具有自主行驶和自动钻锚功能的钻锚机器人等新型钻锚技术和装备,有力推动了掘进支护技术的创新和进步。 回顾和总结国内外在钻锚自动化、机器人化以及类似多任务、多机械臂协同控制系统等方面的研究现状,分析在钻锚设备布局优化、机械臂姿态控制、机械臂轨迹规划和多机协同控制等方面的重 要研究进展,必将对进一步深入研发高性能、高质量、高智能、高效率的钻锚设备具有重要推动作用。
(1)钻锚设备布局优化技术研究现状。 广义上讲,钻锚设备布局属于设施布局问题( Facility Layout Problem,FLP)。 该问题研究的方法主要分为两大类。第一类为基于规则或仿真的方法,其原理主要是依据作业单元的功能与各单元之间的互相关系、物流关系、面积条件等进行分析,并根据实际制约与其他修正条件做出修改从而得到布置方案。 另一类研究方法为基于数学规划的求解方法,该方法将问题转化为一个混合整数规划问题。
(2)机械臂姿态控制技术研究现状。 机械臂姿态控制技术研究方法主要分为两大类:一类是建立姿态轨迹数学模型,计算插补参数,获得装卸曲线。由于机械臂末端姿态位于SO(3),即三维旋转群,很多对于欧几里德空间中位置曲线构造的性质并不能直接应用于构造姿态曲线,且姿态的描述方式相对复杂。另一类是通过相关传感器感知环境,生成装配路径,并运用伺服控制技术进行相应姿态控制的方法。这类方法包括基于示教学习、视觉反馈、力反馈以及多种方法融合等。
(3)机械臂避障轨迹规划技术研究现状。机械臂避障轨迹规划最常用的是人工势场法。 陈满意等提出了低振荡人工势场与ARRT相结合的混合算法,实现多障碍环境下的机械臂末端路径规划。 陈劲峰等引入距离调节因子和屏蔽无效障碍的策略,解决动态避障逃离最优问题。 郭彤颖等将蚁群算法和人工势场法结合,在避障前提下,实现最优轨迹规划。 史亚飞等在传统势场中添加速度势场,对逃离局部最小点有明显的效果。朱瑞明等针对传统的人工势场法在半封闭壳体环境下无法直 接规划出作业杆避障路径的问题,提出了一种复合势场和寻优算法相结合的在线自优化避障规划算法。
(4)多机协同控制技术研究现状。 多机系统的协同控制主要研究如何设计分布式协同控制算法使各设备达到期望的行为模式。 而复杂任务分配作为多机协同控制的前提,其策略的优劣会对任务执行效果产生直接的影响。早期任务分配方法多以集中式分配为主,基于运筹学的匈牙利算法、单纯形法等传统方法被广泛应用。当任务规模和机械臂数量不断扩大,遗传算法、蚁群算法等进化算法充分发挥了启发式算法的优势。
综上所述,近年来随着在智能永久支护方面的研究不断深入,自动化钻锚技术取得了重要的创新性成果,对于提升智能钻锚技术发挥了重要的促进作用。 然而,由于煤矿巷道地质条件复杂、作业空间有限、钻锚任务繁重、操控过程复杂,智能钻锚仍面临严峻挑战。 剖析自动化、智能化钻锚技术及其类似技术的研究进展,具有多机械臂多钻机的钻锚机器人将成为重要的发展方向。因此,破解有限时空多机械臂与多自动钻机布局优化、面向装卸任务的机械臂姿态控制、 复杂受限空间机械臂最优轨迹规划和多机械臂多钻机智能协同控制四大关键技术瓶颈,成功研发高性能、高可靠、高效率的多机械臂多自动钻机协作的煤矿巷道钻锚机器人迫在眉睫。
针对煤矿巷道掘进智能化进程中存在的“ 掘快支慢” 难题,总结分析了国内外快速掘进钻锚技术和装备以及类似多任务多机械臂控制技术的研究现状,指出研发具有多机械臂多钻机协作的煤矿巷道钻锚机器人是破解永久支护难题的重要发展方向。提出了多机械臂多钻机协作的钻锚机器人基本方案,凝练了影响钻锚机器人性能的“有限时空多机械臂与多钻机布局优化、面向装卸任务的机械臂姿态控制、复杂受限空间机械臂最优轨迹规划和多机械臂多钻机智能协同控制” 四大关键技术,并给出了解决思路和方法。
针对在有限时空约束下钻锚机器人结构布局优化问题,构建了钻锚机器人配置优化模型,提出了时空最优的钻锚机器人多机械臂与多钻机结构布局方案,旨在提高钻锚效率的同时获得最优空间布局;针对机械臂与钻机协同位姿控制问题,提出了基于机器视觉和强化学习的机械臂抓取与布放控制方法,旨在提高机械臂末端位姿控制精度,实现精准装卸物料作业;针对复杂受限空间机械臂最优轨迹规划问题,建立了机械臂多目标轨迹优化模型,提出了基于随机采样与包围盒相结合的机械臂防碰撞轨迹优化方法,旨在保证机械臂在搬运过程中安全、可靠、高效运行;针对钻锚机器人多机械臂与多钻机并行协同控制问题,构建了以工序时长最短为目标的时间协同任务分配模型,通过求解得到最优任务指派矩阵和多机械臂相交任务轨迹的优先级,并提出了在所有机械臂无碰撞运动的同时收敛于期望轨迹的分布式协同控制策略,旨在实现钻锚机器人多机械臂多钻机系统的智能协同控制和并行作业。
多机械臂多钻机的钻锚机器人及其关键技术研究,对于创新研发高性能、高效率、高可靠、高智能的煤矿巷道钻锚机器人,确保煤矿巷道安全、高效、绿色智能掘进具有十分重要的意义。
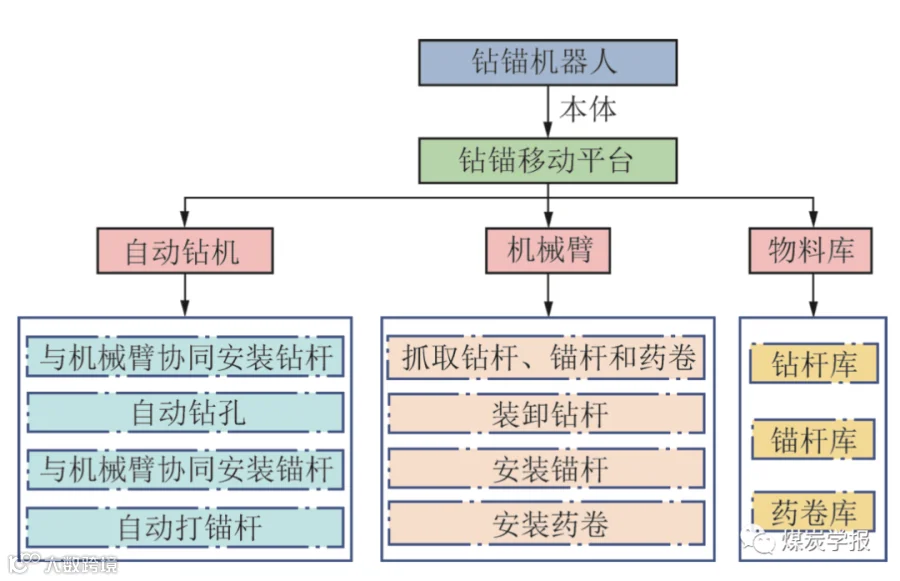
图 1 钻锚机器人功能元结构
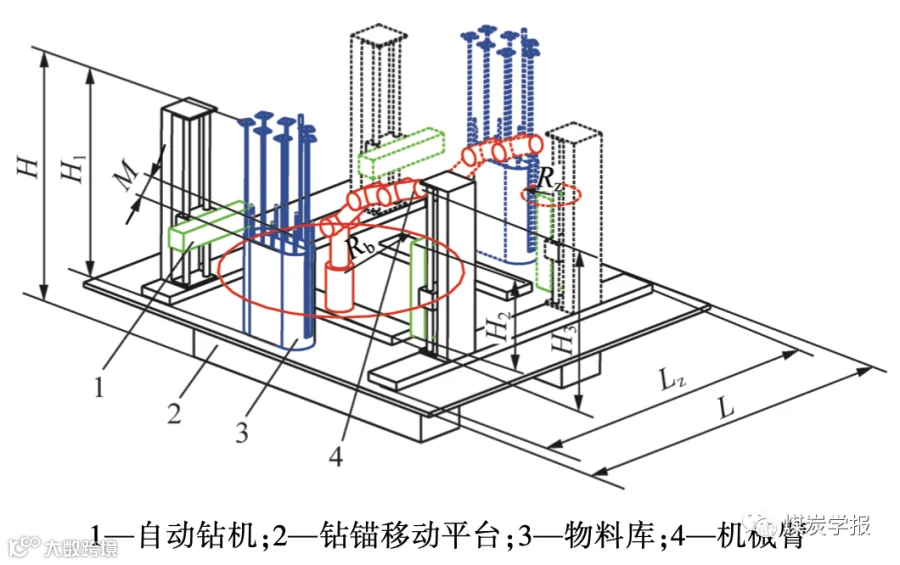
图 2 钻锚机器人模型示意
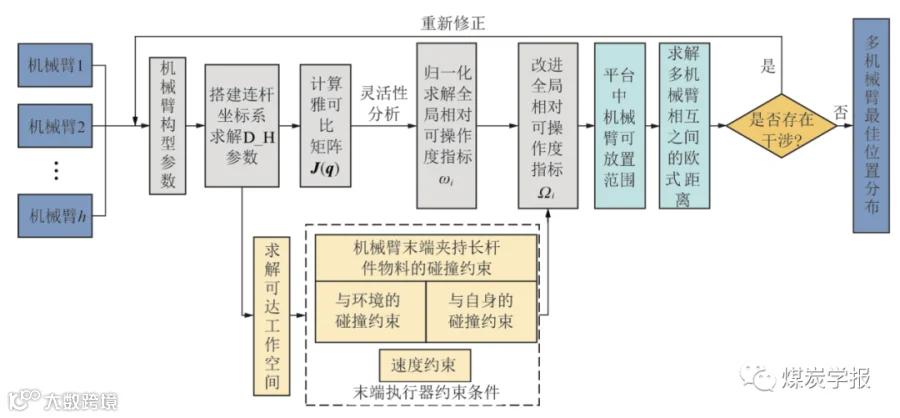
图 3 多机械臂最佳位置求解原理
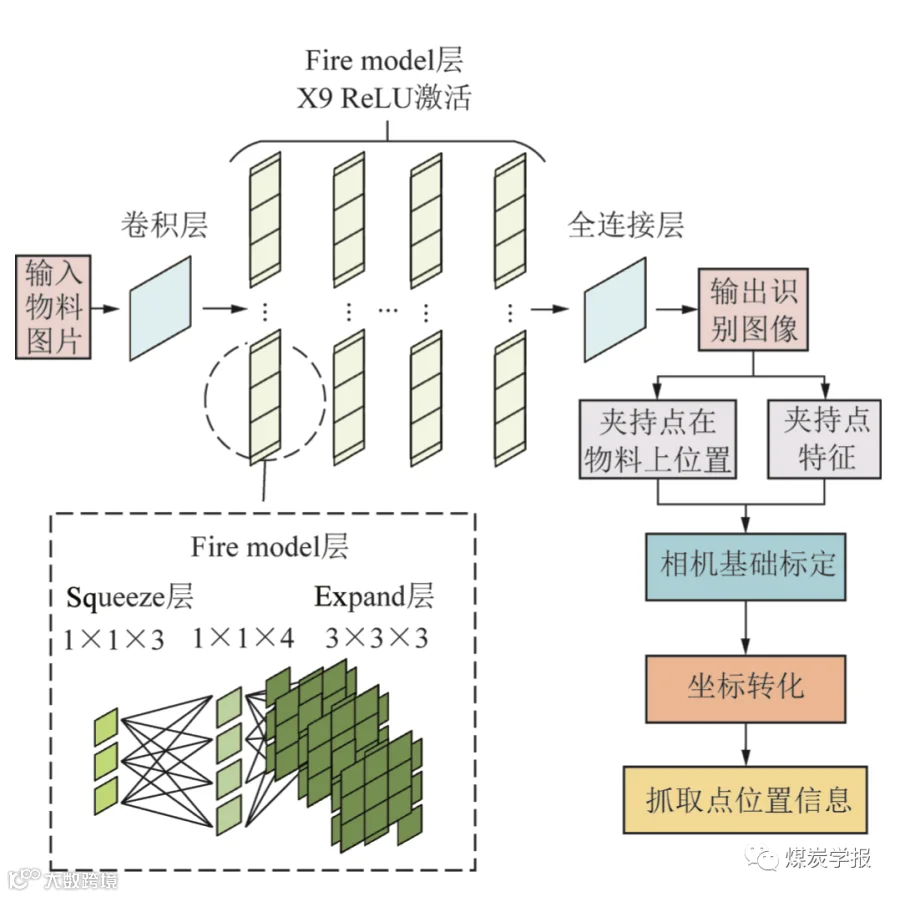
图 4 基于物料图像深度学习的机械臂抓取定位原理架构
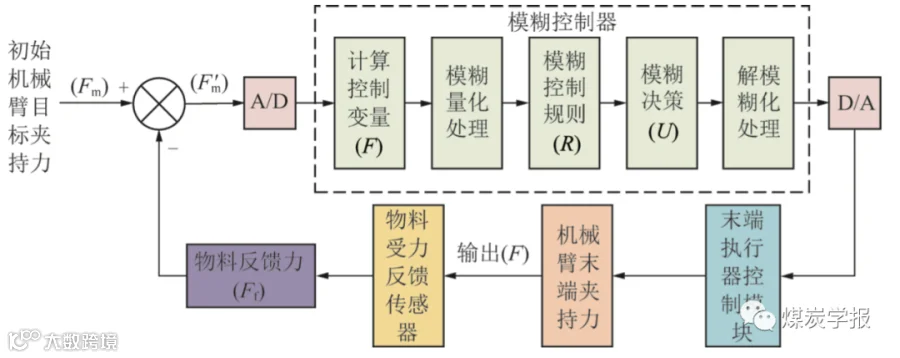
图 5 模糊控制原理
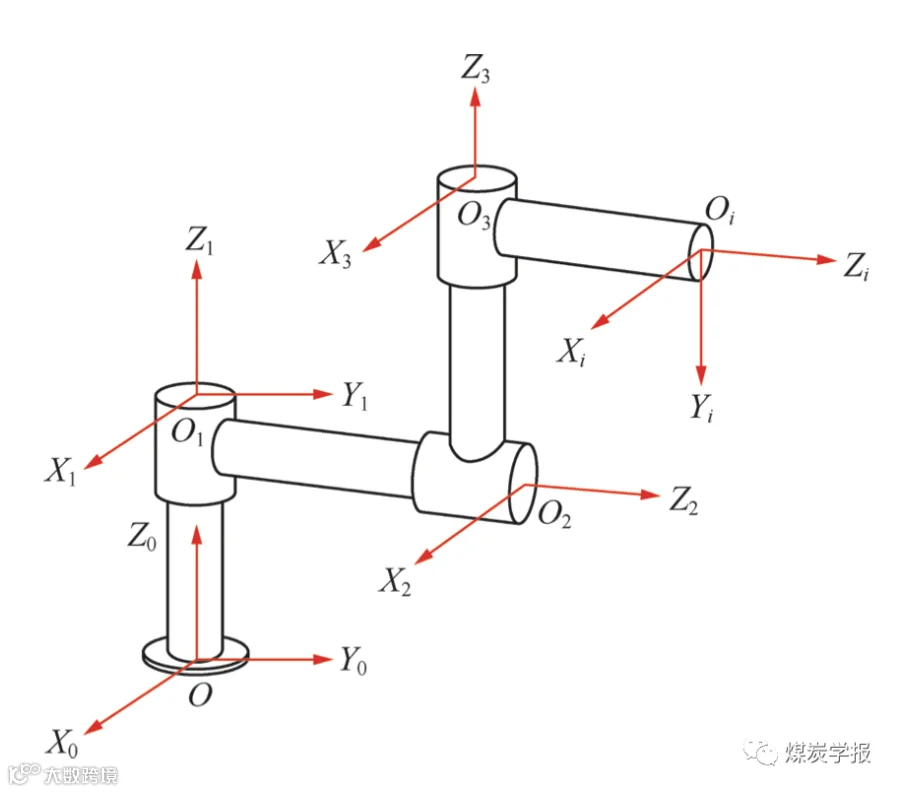
图 6 机械臂自由度表示
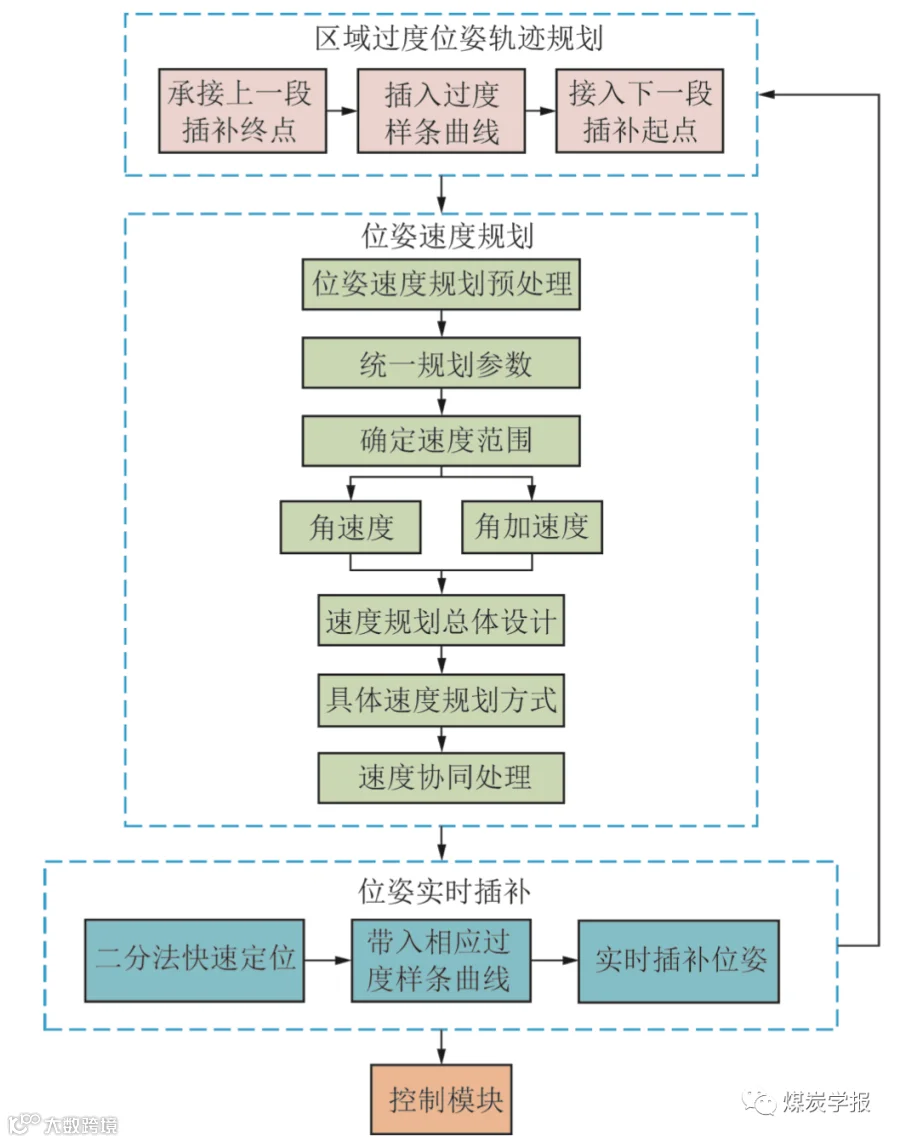
图 7 基于小线段插补的机械臂末端轨迹规划原理
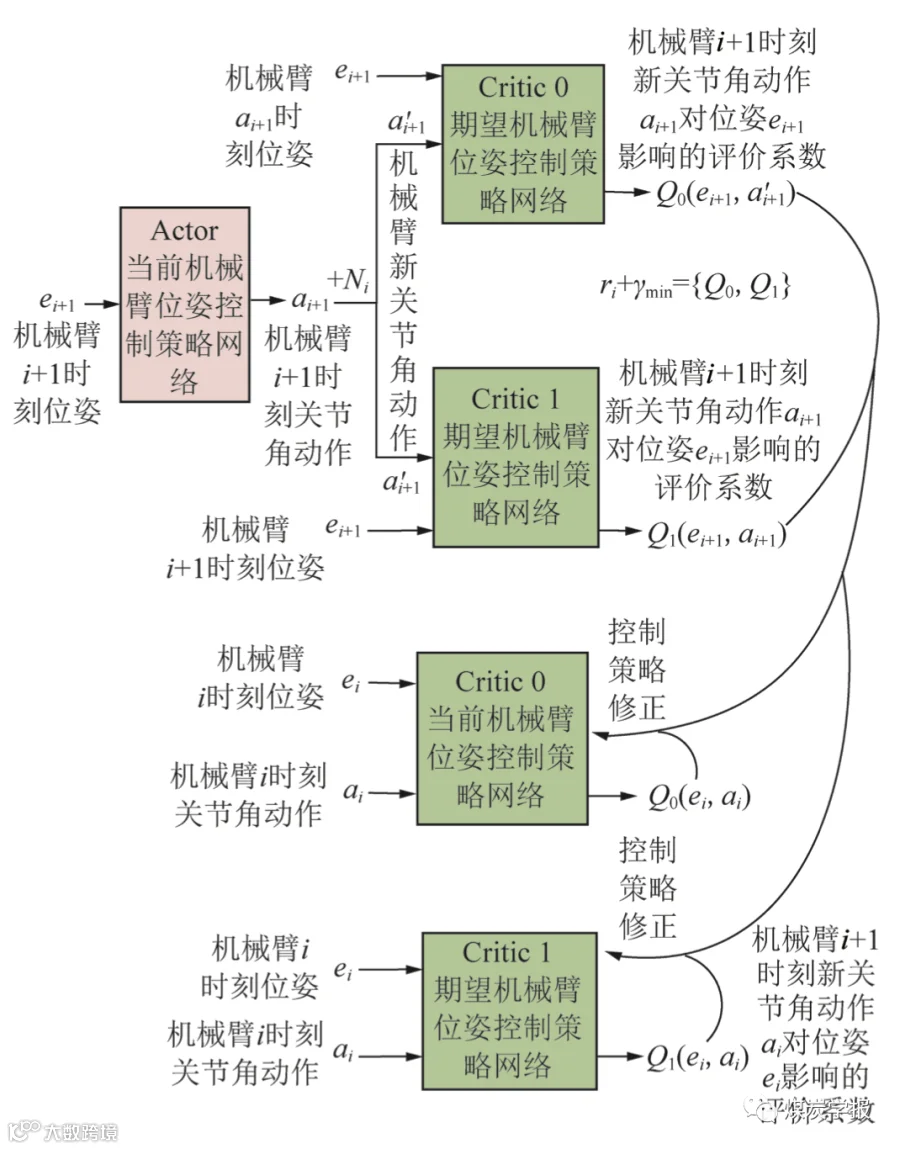
图 8 机械臂最优位姿控制策略原理
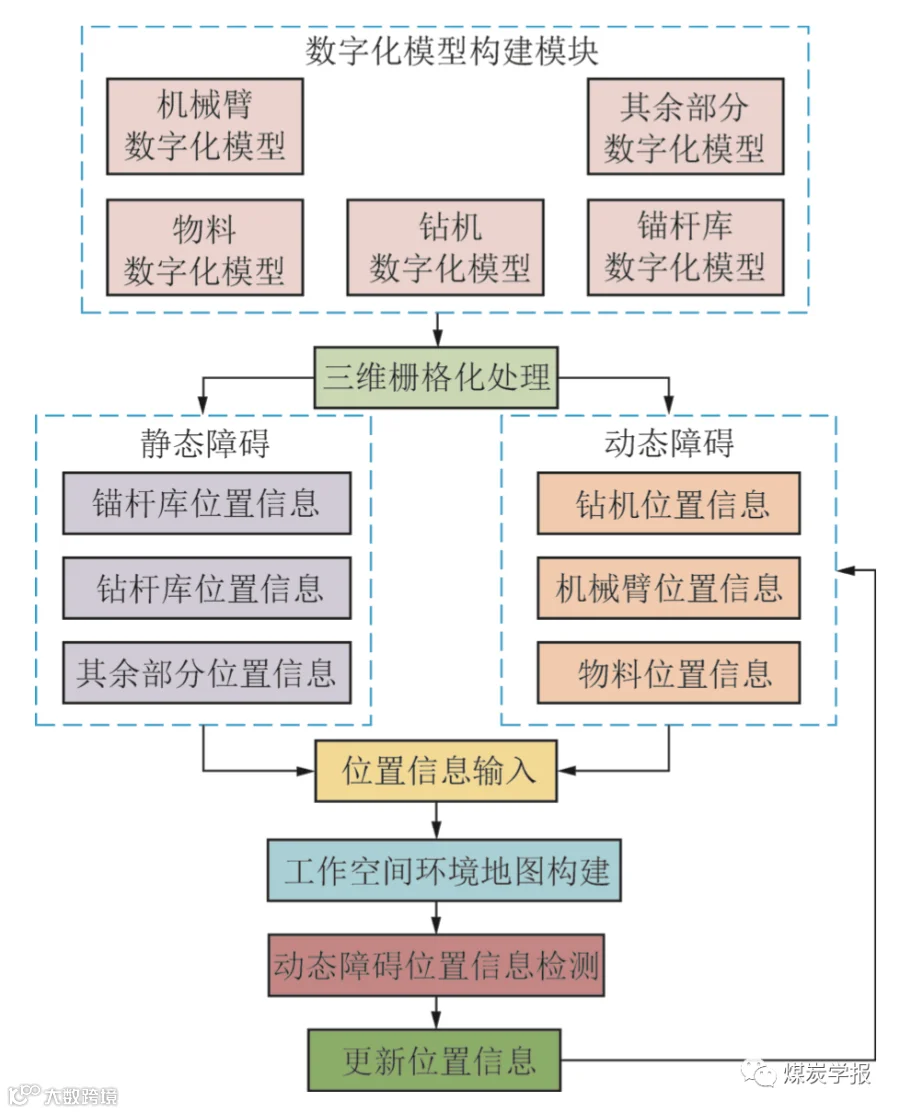
图 9 钻锚机器人工作空间建模方法
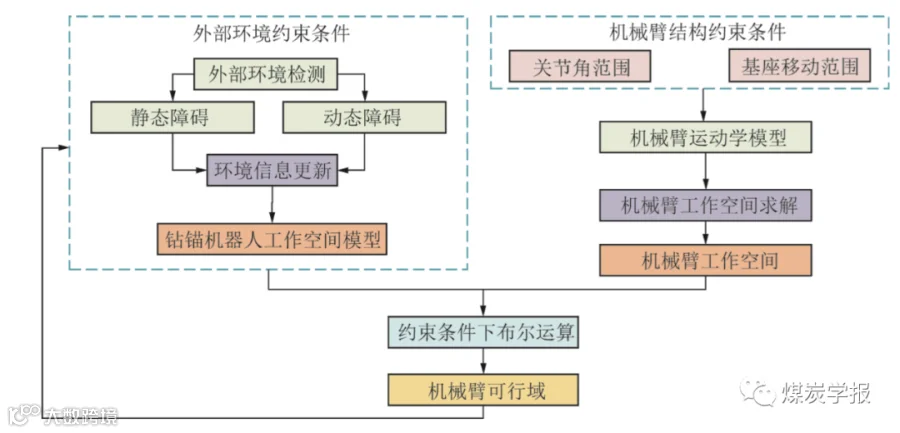
图 10 机械臂可行域求解模型
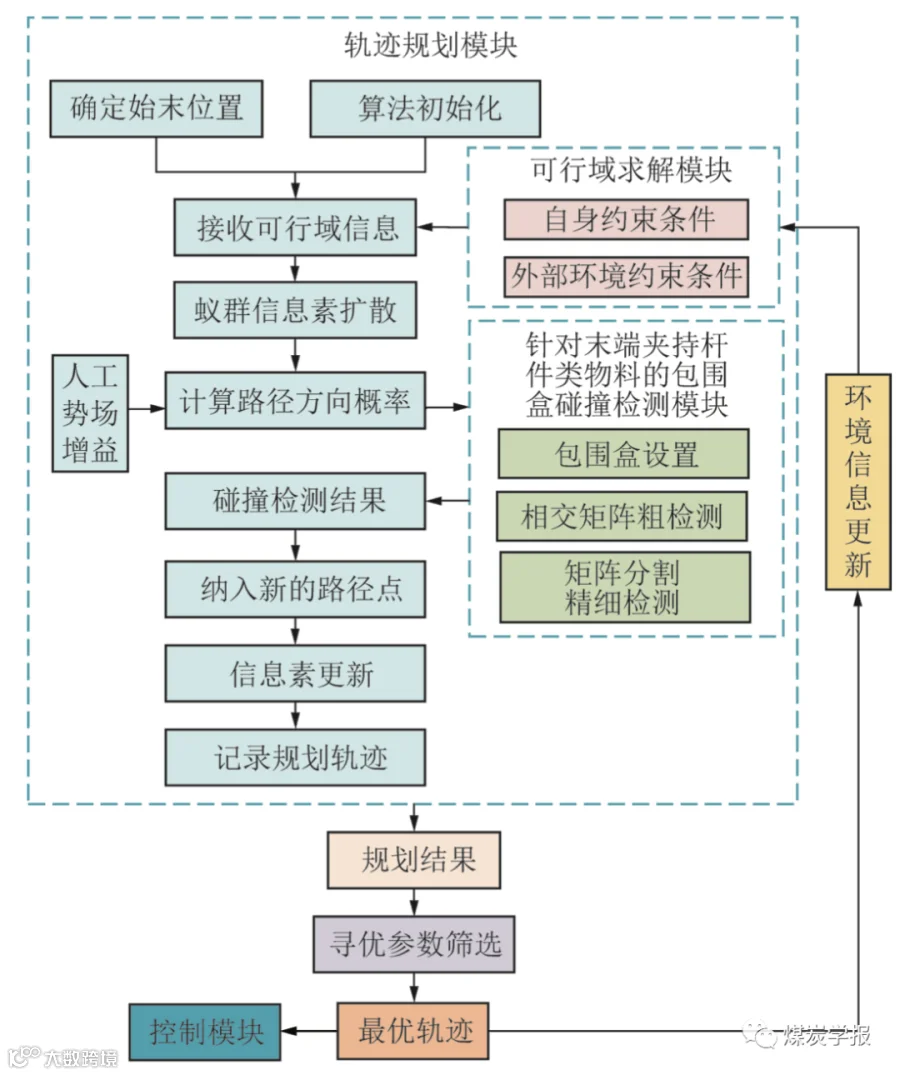
图 11 智能混合轨迹规划算法原理
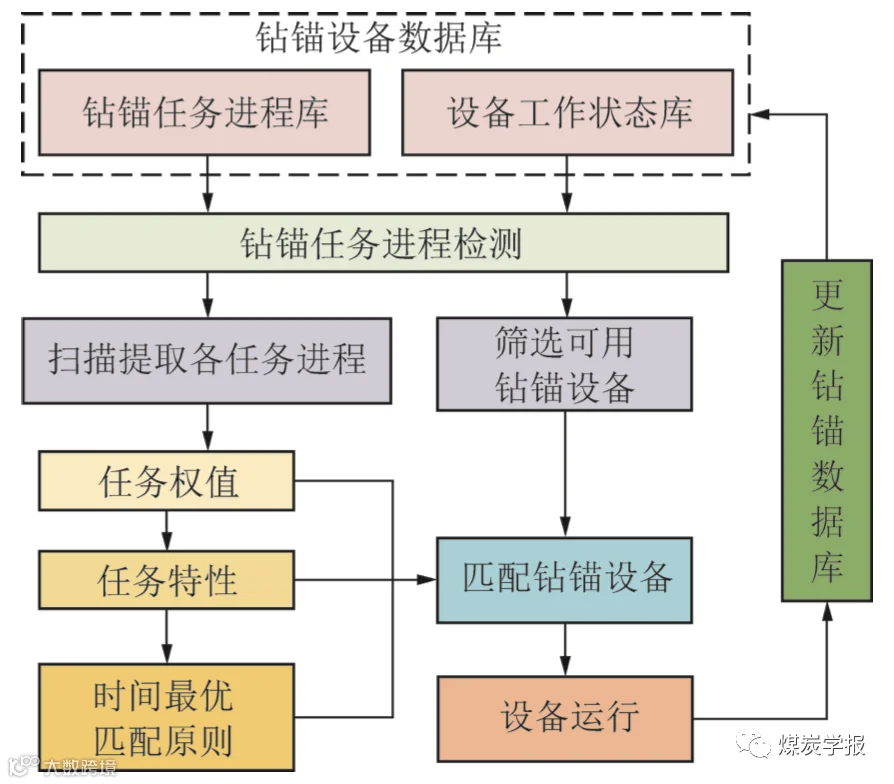
图 12 时间最优任务策略流程
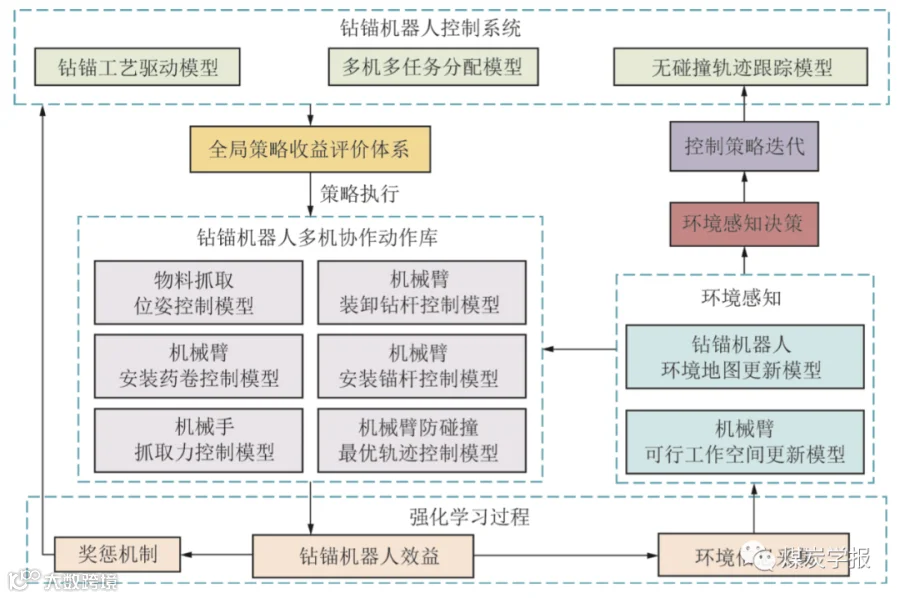
图 13 煤矿钻锚机器人智能协同控制架构
马宏伟,男,1957年10月12日生,工学博士,二级教授,博士生导师。现任陕西省矿山机电装备智能检测与控制重点实验室主任、陕西省煤矿机电工程技术研究中心副主任,矿山机器人及人工智能研究所所长。曾任西安科技大学副校长、研究生院院长、研究院院长、机械电子工程学科带头人等,兼任中国工程机械学会矿山机械分会副理事长、中国煤炭学会机电一体化委员会副主任、中国煤炭工业机电专家委员会委员、陕西省研究生教育学会副会长等。先后主持以国家自然科学基金为代表的国家级、省部级科研项目10余项,主持企业委托项目数十项;获得以陕西省科技进步一等奖为代表的省部级奖20余项,授权国家专利100余项,在国内外学术期刊上发表学术论文200余篇,其中被SCI、EI等收录100余篇,曾被评为“陕西省研究生培养先进工作者”“陕西省优秀教育工作者”。
研究方向
煤矿智能化关键技术、煤矿机器人技术、煤矿机电装备智能检测与控制等
主要成果
提出了煤矿智能机器人、煤矿人机协同智能系统、数字煤层构建及智能开采、智能掘进、煤矿机电设备远程智能控制、煤矿设备全生命周期智能维护与健康管理等关键技术和理论方法,形成了“采煤就是采数据”“掘进就是掘模型”“拣矸就是拣图像”“矸石不升井,拣矸不用人”等煤矿智能化思想体系,研发了以智能化掘进系统和智能化综采系统为代表的煤矿智能检测与控制系统,破解了多项煤矿智能化技术及装备难题,创造了巨大的经济效益和社会效益。
来源:
马宏伟,孙思雅,王川伟,等.多机械臂多钻机协作的煤矿巷道钻锚机器人关键技术[J].煤炭学报,2023,48(1):497-509.
免责声明:本文所载内容系网络资料,无法联系版权所有人,如文章文字、图片存在侵权行为,烦请联系公众号运营人员,微信号:qjd2013,我们会予以删除!





