
分享是最大的支持,关注是最好的鼓励


一
矿井动目标定位系统
根据《煤矿智能化建设指南》要求,煤矿应当采用精确定位技术实现井下人、车、移动装备等目标的精确定位和有效管理,以满足井下复杂巷道的全覆盖需求。
1、矿井动目标定位系统特点
由于煤矿井下特殊工作环境和日益增长的安全要求,现有矿井动目标定位系统不能完全满足煤矿动目标精确定位需求。面临着井下无线信号传输衰减严重、非视距误差较大、井下电磁环境复杂、人员、车辆及采掘装备等全覆盖定位,定位目标数量巨大、多系统信息融合联动性强等难题和挑战。
2、矿井动目标精确定位系统要求
矿井动目标精确定位系统主要包括人员精确定位系统、车辆及交通管理系统、采掘装备运动监测及远程控制系统等。① 为了实现矿井日常安全管理和灾后应急救援,需建立能够掌握人员精确位置的定位系统。要求系统定位精度高、数据无缺失、轨迹不漂移、应急保障能力强。② 为了实现矿井无人驾驶系统、物流管理系统、辅运智能调度系统的准确控制和管理,需建立能够掌握井下车辆位置和路径的定位系统。车辆及交通管理系统需要与人员精确定位系统进行融合,实现人车闭锁,减少由于车辆运输对人员造成的伤害事故。③ 为了实现采掘工作面远程精确控制,需要建立能够实现采掘装备实时位置搜索、路径分析的定位系统。采掘装备运动监测及远程控制系统需要与人员精确定位系统进行融合,识别进入被设定为危险区域的人员,对采掘装备进行限制或闭锁,避免自动化生产过程中产生的人员安全隐患。
二
矿井动目标精确定位方法
矿井动目标精确定位方法由定位技术和定位算法组成。我国煤矿常用的定位技术包括惯导定位技术、超声波定位技术、激光定位技术、无线电定位技术等;定位算法分为测距定位算法和非测距定位算法2 类,目前煤矿通常采用测距定位算法。
1、定位技术
① 惯导定位技术无需外部输入信息,不受外部电磁干扰,短时精度高,稳定性好,但高精度的陀螺仪价格昂贵,定位精度随目标移动幅度增大而增大,定位误差随时间增加而增大。惯导定位技术适用于采掘装备运动监测及远程控制系统,但不适用于人员精确定位 系统和车辆及交通管理系统。② 超声波定位技术主要利用超声波雷达测距方法进行定位。超声波定位技术难以满足矿井动目标精确定位系统的技术要求,但可用于定位辅助,测量障碍物距离。③ 激光定位技术能够有效避免粉尘干扰,探测距离远,定位精度较高,但无法进行非视距定位。激光定位技术可应用于采煤机、掘进机等装备的位姿感知,但不适用于人员精确定位系统和车辆及交通管理系统。④ 无线电定位技术具有传播距离远、定位精度高、可非视距传输等优点,被广泛应用于矿井动目标精确定位系统。
2、定位算法
衡量矿井动目标定位算法的主要性能指标包括定位精度、建设成本、受巷道环境影响大小、受定位卡和分站时钟频率偏移影响大小、是否需要分站与定位卡时钟同步、是否需要分站间时钟同步。
三
矿井动目标精确定位优化方法
从信号防碰撞技术、误差消除方法、定位结果优化方法和融合定位技术4个方面分析了我国矿井动目标精确定位优化方法的研究现状,并分析了存在的问题。
1、信号防碰撞方法
矿井动目标定位系统需实现井下人、车、重点设备全覆盖,要求系统具有高并发能力。多组数据同时返回可能会引起信号碰撞,导致时延增加、误差增大、漏读率增大等。现有研究通过多路时分复用、双信道、空闲时隙消除等方式有效解决了信号碰撞问题,但缺乏对冲突监测机制和冲突后恢复机制的研究;对定位卡防碰撞算法的研究较多,但缺乏对基站防碰撞算法的研究;研究多集中在静态环境下,缺乏动态环境下的研究。
2、误差控制方法
多种因素导致目前所有测距方法均具有误差,RSSI 测距方法受非视距误差影响较大,TDOA、TOA 测距方法对时间准确性要求严格。现有误差控制思路主要分为2种,一是改进测距方法以减少定位结果的影响因素,二是通过研究信号处理方法优化解算结果。一般通过增加信号传输过程、引入修正因子、多方法协作定位等方式实现误差控制,存在算法复杂、计算时间长、收敛速度缓慢、通信开销较大等问题。
3、定位结果优化方法
引起定位误差的因素众多,通过误差控制方法难以完全消除误差对定位精度的影响。研究信号处理和优化目标节点解算算法,可以增强信号有效性,优化解算结果,提升系统定位精度。目前针对融合定位方法的研究多为理论模拟研究,系统的实践研究较少,未能得到现场应用验证;且多数研究中将巷道模型简化为一维模型或二维模型,实际巷道模型应为复杂三维模型,三维定位精度仍有待提升。
4、融合定位方法
现有定位方法难以满足矿井动目标精确定位系统的要求。研究多种定位技术或测距方法的融合定位方法,可以集不同技术的优势弥补单一定位技术的不足,同时能够增强系统的应急保障能力,提升系统的效率。现有研究中多数只提到动目标精确定位系统可以在灾后应急救援中提供精确的人员位置信息和运动轨迹,但对如何提升系统自身灾害抵御能力、应急保障能力及系统的应急救援辅助能力的研究仍为空白。
四
展望
煤炭将持续占据我国能源结构主体地位,未来矿井动目标精确定位技术发展趋势如下图所示。
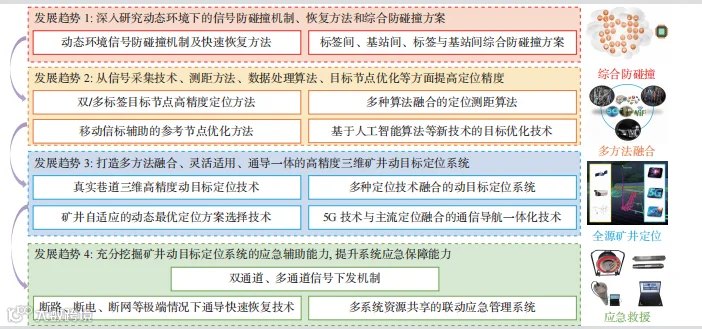
(1) 深入研究动态环境下信号防碰撞机制、恢复方法及综合防碰撞方案。① 研究动态环境下信号防碰撞机制,完善信号冲突机制和冲突后恢复机制,研究碰撞后快速恢复方法,可有效避免由于环境变化造成的漏读率升高。② 设计标签间、基站间、标签与基站间信号防碰撞的综合方案,对完善信号防碰撞机制发挥着重要作用。
(2)从信号采集技术、测距方法、数据处理算法和目标节点优化等方面提高定位精度。针对不同动目标采用双/多标签定位模式;采用部分装有惯导设备或激光定位装置的目标作为移动信标辅助定位;应用深度学习等人工智能算法进行误差学习,通过有效利用测距误差优化定位精度,同时应充分平衡优化算法的计算时间成本和精度提升水平,确保优化方案具有实用性;采用数据融合思想,研究多种算法融合的测距算法,充分利用不同类型数据包含的信息也是提高定位精度的研究思路之一。
(3)打造多方法融合、灵活适用、通导一体的高精度三维矿井动目标定位系统。引入高度差,建立复杂的三维定位模型,提升动目标三维定位精度,使系统满足日益增长的安全需求;研究多种定位技术或测距算法融合的精确定位系统,开展融合定位系统实践研究;研究全源矿井自适应动态定位系统,动态选择满足当前矿井定位需求的最优设备组合和定位测距算法;充分利用 5G 等新兴技术的通信导航一体功能,与主流定位技术融合,大幅度提升定位性能的同时节约资源。
(4)充分挖掘矿井动目标定位系统的应急辅助能力,提升系统应急保障能力。建立双通道、多通道的信号下发方式;实现矿井动目标精确定位系统与井下广播系统、安全监控系统等系统互通互联、及时响应,实现对井下人员和重要物资的定位安全保障;针对灾害后可能出现的断路、断电、断网等极端情况特点研究灾后通信网络重构与定位系统快速恢复技术。

引用格式
郑学召,严瑞锦,蔡国斌,等. 矿井动目标精确定位技术及优化方法研究[J]. 工矿自动化,2023,49(2):14-22.
ZHENG Xuezhao, YAN Ruijin, CAI Guobin, et al. Research on precise positioning technology and optimization method of mine moving targets[J]. Journal of Mine Automation,2023,49(2):14-22.
作者联系方式
郑学召(1977—),男,新疆焉耆人,教授,博士,研究方向为应急技术与管理、矿山防灭火技术, E-mail: zhengxuezhao@ xust.edu。

扫码阅读全文
来源:工矿自动化


