分享是最大的支持,关注是最好的鼓励


摘要
针对地下金属矿铲运机自主行驶控制问题,提出了一种适用于短距离矿石运输工作环境的铲运机自主控制方法。首先,基于对铲运机车辆结构的分析,多维度对比了不同操作方式的铲运机系统;然后,利用工业以太网、智能控制器和多线激光雷达搭建了铲运机自主驾驶系统;最后,提出了铲运机自主驾驶融合控制方法。该方法采用分段控制策略,在采场穿脉及放矿穿脉内采用“低速高稳定性”车辆控制模型,在运输大巷内采用“高速高效率”车辆控制模型。在此基础上,搭建了试验仿真平台。试验结果表明:所提出的控制方法可以保证铲运机井下工作的稳定性和矿石运输效率,可为地下金属矿铲运机自主驾驶提供有益参考。
作者及单位
杜富瑞1, 陈国良2, 朱铭1, 战凯1, 张元生1
引用格式

正文
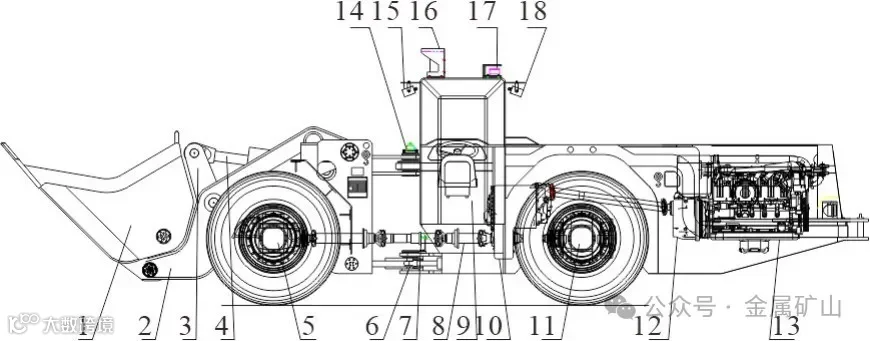
金属矿产资源为人类社会发展提供了坚实的物质保障和能源保障,在国民经济生活中扮演着不可或缺的重要角色。铲运机是地下金属矿的重要采矿装备,主要完成井下短距离工作环境内的矿石铲装、矿石运输及矿石卸载。在矿石深部开采过程中,面临高温、高井深、高地应力及采矿扰动的恶劣工况,传统的有人驾驶铲运机工作模式劳动强度大且存在一定的安全隐患。如何在井下恶劣工况中提高铲运机工作效率及安全性、降低劳动强度,是制约深部安全高效采矿的瓶颈问题。
基于自主驾驶系统的地下金属矿铲运机可以自主完成矿石铲装、矿石运输及矿石卸载,工作效率和安全性大幅提高。针对车辆自主控制系统,很多学者进行了广泛研究,主要包括模糊控制、滑模控制、智能控制等。ASLAM 等基于滑移转向车动力学模型设计了模糊滑模变结构控制器;赵翱等针对农用轮式车辆利用Ackermann 公式与指数趋近律设计了滑模控制器;ABATARI 等设计了用于轮式机器人底盘的模糊PID 路径跟踪控制器;石峰等基于铲运机运动学模型及单线激光雷达,设计了一种沿路径中线行驶的控制方法;杨超等通过在巷道布置识别信标实现了铲运机的自主导航行驶;龙智卓等利用模糊控制器实现了铲运机沿巷道中线的自主行驶;王伯建等利用强化学习方法构建了车辆速度控制模型;顾青等提出了一种基于双维度搜索的铲运机实时轨迹规划方法。综上,上述研究对于实现真实场景中铲运机自主控制提供了有益参考,但在不同程度上存在计算量大、自适应性不强等不足。
本研究基于地下金属矿短距离矿石运输工作环境,设计了一种融合“低速高稳定性”模型与“高速高效率”模型的车辆自主驾驶控制方法,在采场穿脉及放矿穿脉内采用“低速高稳定性”车辆控制模型,在运输大巷内采用“高速高效率”车辆控制模型。经过试验仿真分析,该方法可以兼顾铲运机运行稳定性和矿石运输效率,实用性较好。
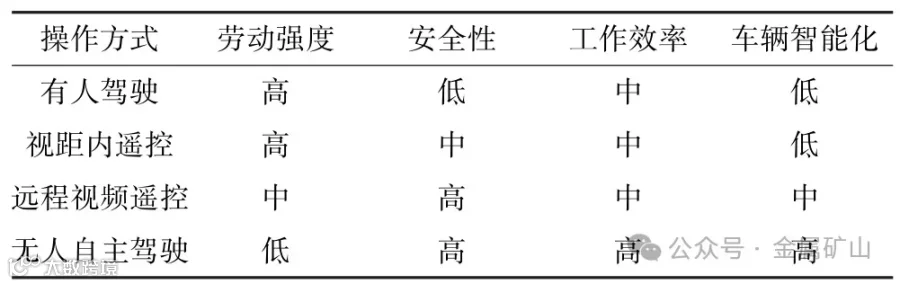
根据铲运机操作方式,可分为有人驾驶、视距内遥控驾驶、远程视频遥控驾驶及无人自主驾驶。有人驾驶需要驾驶员驾驶铲运机完成作业,存在驾驶员工作强度大易疲劳、井下密闭空间空气质量差对驾驶人身体不利等不足;视距内遥控驾驶需要操作员通过遥控器视距内(100 m 以内)操作铲运机;远程视频遥控驾驶是操作员在地面操作台利用远程视频、车体状态参数监控等方式远程遥控铲运机作业;无人自主驾驶是铲运机通过车载计算机和自身传感器完成环境感知、自主导航和自主行走。本研究从劳动强度、安全性、智能化程度等方面对各种操作方式进行了对比分析,结果见表1。
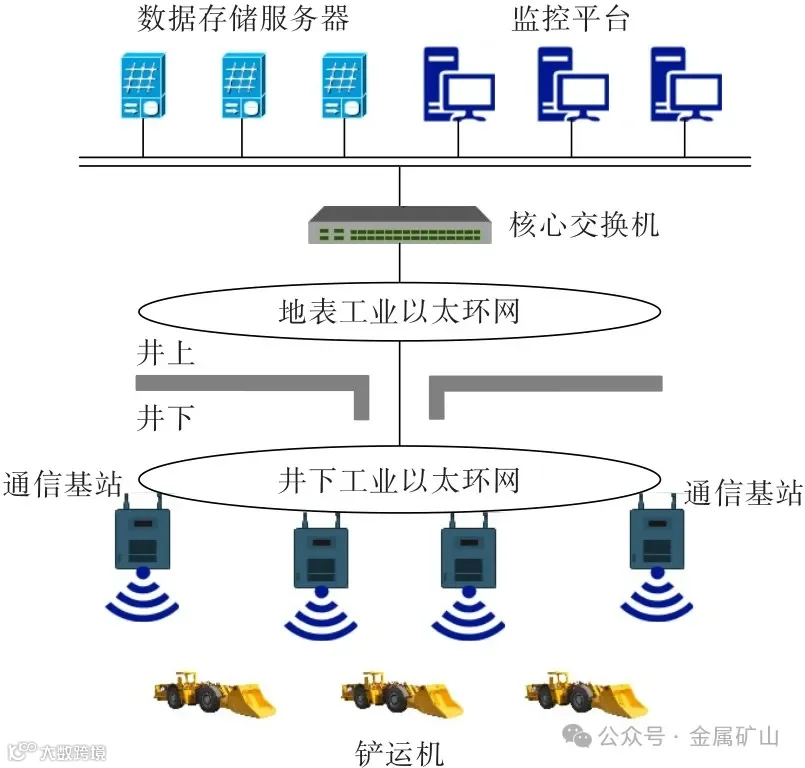
铲运机自主驾驶系统主要由地面监控中心、网络通信系统及车载控制系统构成,如图2 所示。地面监控中心由数据服务器及监控平台组成,实时收集车辆状态和井下环境信息进行存储及展示。网络通信系统通过有线—无线耦合的方式实现,包含3 级拓扑架构:地表工业以太环网构成第1 级有线拓扑网络,连接车辆自动驾驶系统及其他地面自动化系统;井下有线工业以太网络为第2 级拓扑架构,连接地面工业以太环网及井下车辆自动驾驶系统;第3 级网络由巷道无线通信基站构建,实现车辆状态信息及巷道环境视频信息的收集上传。车载控制系统汇总收集车辆视频、转角、温度、压力、液位等多传感器数据,并通过通信网络传输至地面监控中心。
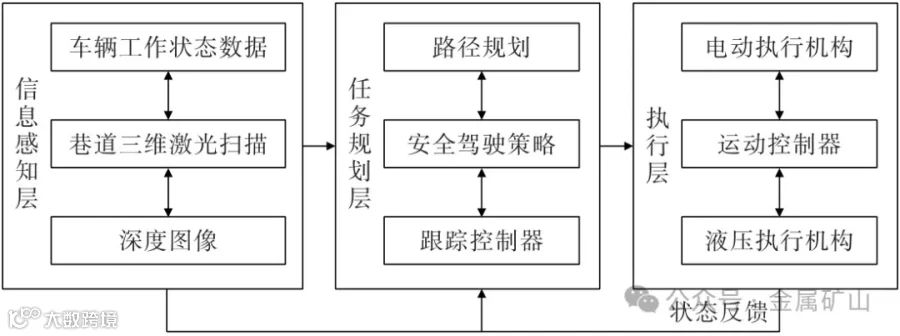
本研究车辆自主驾驶平台总体结构可以分为信息感知层、任务规划层及行为执行层,如图3 所示。信息感知层实时采集车辆工作状态数据及外围环境数据并进行融合处理,包括行驶速度、车体转向角度、航向角、巷道三维点云、深度图像等数据;任务规划层结合车辆运动学模型、动力学特性及感知层采集融合数据进行车辆行驶路径规划及任务决策,由车辆智能驾驶控制器及控制算法完成;行为执行层根据任务规划层指令控制车辆动作,包括车辆前进后退、转弯避让、换挡加减速等,由车辆运动控制器和电液执行机构完成。
采用英伟达Jetson AGX Xavier 智能驾驶控制器作为任务规划层控制平台,其核心Xavier 芯片为英伟达迄今为止最复杂的SOC 芯片,也是ARM 生态产品之一。针对激光雷达、惯性导航、位姿等车载传感器具有采样频率不一致、分布式异步实时采样的特点,Jetson AGX Xavier 搭载机器人操作系统(ROS)作为自主驾驶车辆数据处理平台。ROS 操作系统是一种开源操作系统,具有基于消息传递通信的分布式多进程框架,可以为不同计算机群组之间进行并行操作提供软件环境。ROS 系统主要组件包括管理器(Master)、节点(Node)和服务器(Service)。其中,Master 的主要作用是命名服务,它存储系统启动时的运行参数、消息发布上游节点和接收下游节点的连接名和连接方式,以及已有ROS 服务的连接名;Node是执行单元,对收到的消息进行处理,并发布新的消息给下游节点;Service 是一个服务节点,接收请求并返回请求的结果。
与地面移动车辆相比,井下铲运机定位过程存在非结构化受限空间、光线照度弱、GPS 定位信号无法使用及存在电磁干扰等问题,为此,本研究采用激光雷达和惯性导航单元感知数据作为信息源的融合同步建图定位(SLAM)方法。铲运机车载自主驾驶系统采用多线激光雷达和惯性导航单元,在车辆行驶过程中采集巷道环境信息和车辆运动信息。针对加速度计瞬时测量精度不高及陀螺仪累积积分漂移大的问题,将加速度计和陀螺仪数据进行融合校正;将激光雷达实时扫描数据与环境地图数据进行实时匹配并进行卡尔曼滤波处理,从而获取铲运机实时位置和姿态信息。
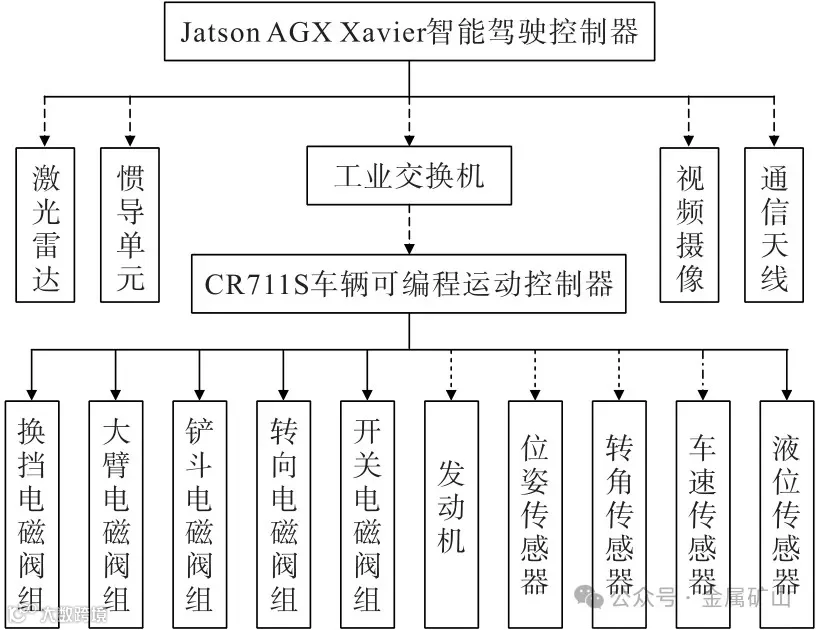
车辆执行层控制系统如图4 所示,采用易福门CR711S 车辆运动控制器作为车辆行为执行层控制平台,控制器外接电磁阀组(换挡、大臂升降、铲斗升降、转向)、发动机及部分车辆状态感知传感器(位姿、转角、车速、液位等),实现车辆动作(前进、后退、转弯、加减速等)控制和车辆工作数据采集处理。工业交换机作为数据链路枢纽,连接车辆运动控制器与智能驾驶控制器平台,实现车辆工作状态数据上传及车辆控制策略下发。

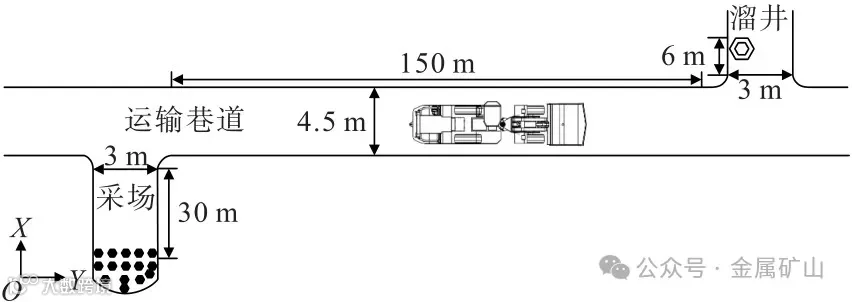
在矿体厚大并采用空场嗣后充填、阶段崩落或自然崩落采矿方法开采的地下金属矿山,矿石开采过程相对简单,装矿点和卸矿点位置固定且两者之间相对较近。在完成矿石凿岩装药及燃爆落矿后,作为出矿装备的铲运机在采场出矿点和溜井卸矿点之间做周期性往复运动。井下模拟工作场景如图5 所示,建立平面坐标系,其中沿运输巷道中线为Y 方向,沿采场中线为X 方向。铲运机尺寸为8.5 m×2.2 m×2.2 m(长×宽×高);采场穿脉巷道断面尺寸为3 m×3 m,长度为30 m;溜井穿脉巷道断面尺寸为3 m×3 m,长度为6 m;运输巷道断面尺寸为4.5 m×4.0 m,长度为150 m。为了确保铲运机行驶稳定性和矿石运输效率,设定铲运机在采场巷道及溜井巷道内按照1~5 km/h 低速行驶,运输巷道内按照6~12 km/h 高速行驶。
铲运机的工作过程主要包括采场穿脉内矿石铲装、运输大巷内矿石运输、放矿穿脉内溜井的矿石卸载。其中,采场穿脉及放矿穿脉巷道相对狭窄、路面起伏大且存在曲率变化较大的弯道,车辆适宜低速行驶(小于5 km/h),保证车辆稳定性;运输大巷相对较宽、路面平整且路线平直,车辆适宜高速(最高12 km/h)行驶,提高车辆运输效率。基于此,本研究采用分段车辆控制模型,在采场穿脉及放矿穿脉内采用“低速高稳定性”车辆控制模型,在运输大巷内采用“高速高效率”车辆控制模型。利用Matlab 仿真平台分别对比例积分微分(Proportional Integral Differential,PID)和模型预测控制(Model Predictive Control,MPC)两种控制方法进行了仿真计算,路径跟踪效果如图6、图7 所示。
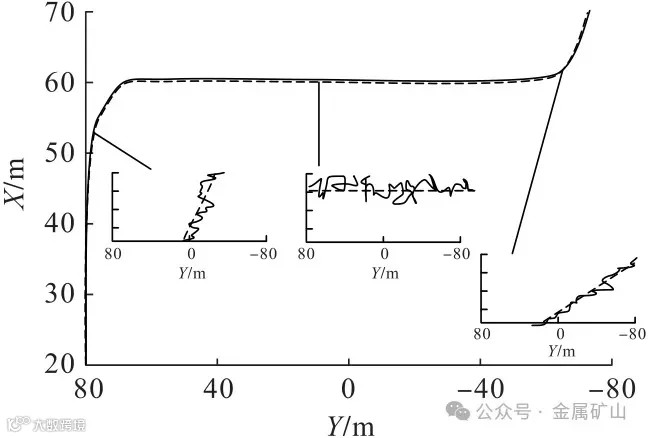
图6 PID 路径跟踪效果

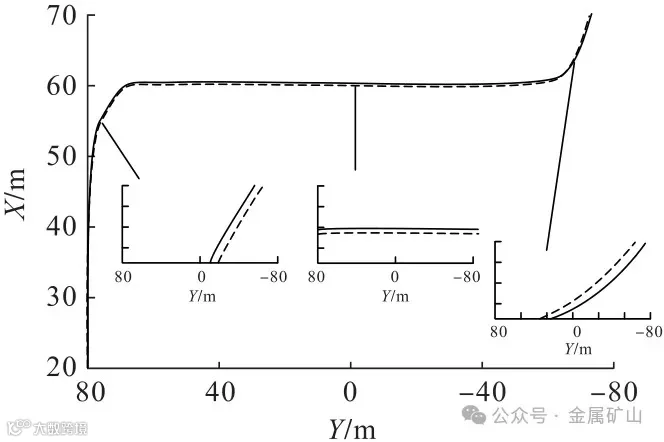

由图6 可知:使用PID 控制模型的铲运机,在长距离运输巷道高速行驶状态下的车辆实际路径与参考路径偏差较大,车辆“抖振”现象明显;在短距离采场和溜井(含转弯)巷道低速行驶状态下的车辆状态则相对稳定。由图7 可知:使用MPC 控制模型的铲运机,在长距离运输巷道高速行驶状态下的车辆实际路径与参考路径偏差较小,车辆状态稳定;在短距离采场及溜井(含转弯)低速状态下的车辆实际路径与参考路径偏移较大。综上,车辆在长距离巷道高速行驶状态下,MPC 的控制效果优于PID;车辆在短距离巷道低速行驶状态下,MPC 的控制效果逊于PID。这是因为:MPC 控制模型综合了车辆航向角、横向偏差及纵向偏差等多种权重输入因素,加之车辆在短距离巷道内的运行时间较短使得车辆控制系统响应不及时所致。
轨迹偏差是车辆实际路径与参考路径的差值,是表征车辆运行稳定性的重要指标。轨迹偏差分为横向偏差与纵向偏差。横向偏差是指沿垂直于车辆前进方向的实际路径和参考路径的距离偏差,纵向偏差是指平行于车辆前进方向的实际路径和参考路径的距离偏差。其中,横向偏差过大会导致车辆与巷道壁碰撞,反映出车辆行驶稳定性欠佳。轨迹偏差随时间变化特征如图8 和图9 所示。
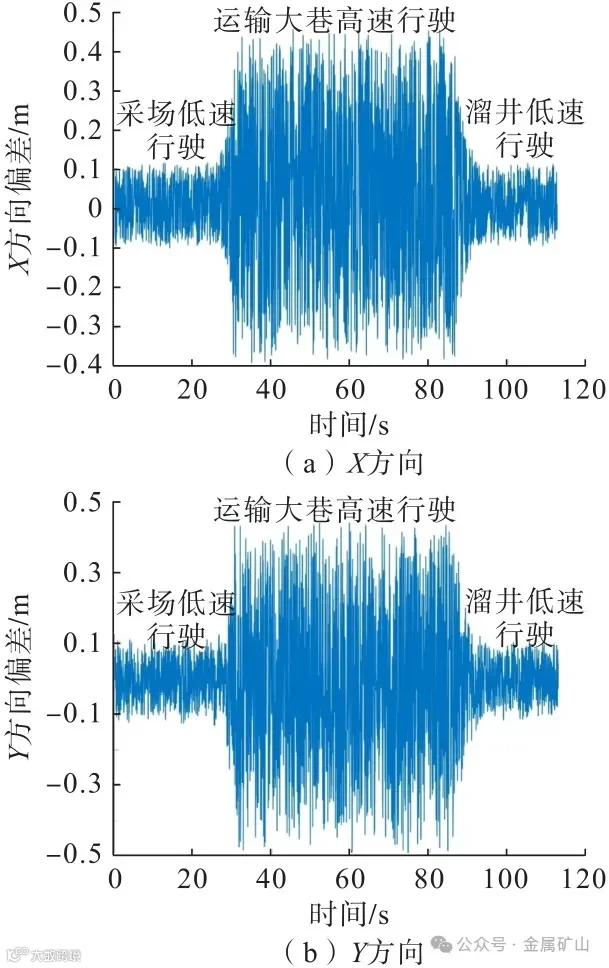
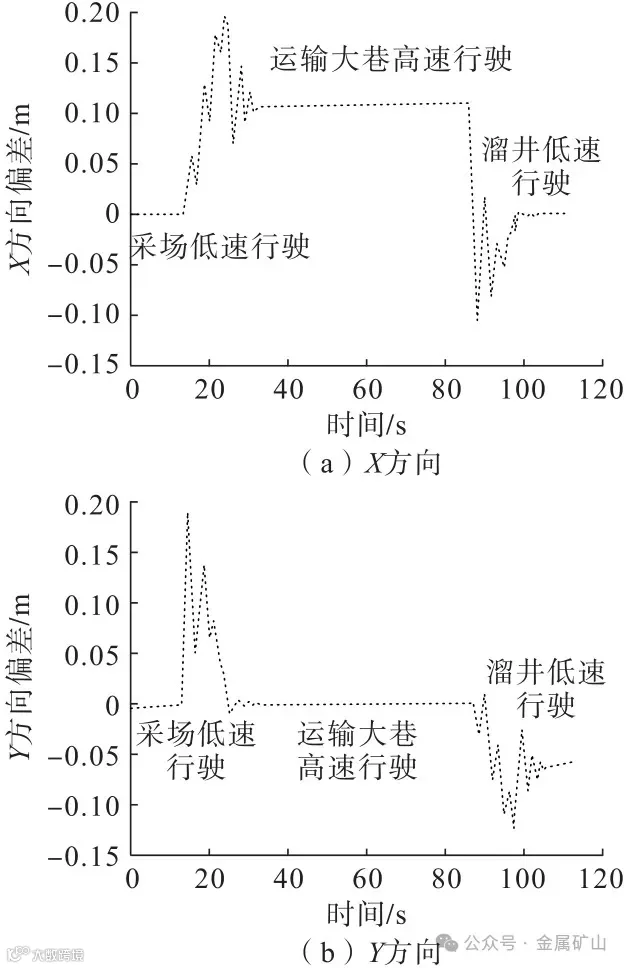
由图8 和图9 可知:PID 模型低速状态下的横向偏差最高约0.1 m,在高速状态下的横向偏差最高约0.4 m;MPC 模型低速状态下横向偏差最高约0.2 m,在高速状态下的横向偏差最高为0.1 m。综上,在低速状态下,车辆采用PID 控制模型时横向偏差最小,与采用MPC 控制模型相比,降低了50%;在高速状态下,车辆采用MPC 控制模型时横向偏差最小,与PID控制模型相比,降低了75%,验证了本研究提出的融合控制方法的合理性。
本研究提出了一种适用于地下金属矿短距离矿石运输环境的铲运机自主驾驶控制方法。基于地下金属矿铲运机铰接式车体构成,多维度对比分析了不同操作方式铲运机系统,论证了自主驾驶铲运机系统的优越性;利用工业互联网、智能控制器、多线激光雷达等技术,构建了铲运机自主驾驶系统;并进一步提出了融合PID“低速高稳定性”和MPC“高速高效率”模型的车辆自主控制方法。仿真试验表明:所提方法有助于进一步提升铲运机工作稳定性以及矿石运输效率。