
“ 经常有朋友问如何学习仿真测试,于是想着把自己的一些经验和理解分享出来,希望能有所帮助。不过视野和技术有限,所说不一定对,供大家批评和参考。这是第19篇,CARLA的车辆模型。”
国庆前的一篇介绍了CARLA的基本概念,然后就是逐渐对CARLA中的各个部分进行介绍了。终于在国庆期间赶完了这篇,可能是全网最详细的CARLA车辆模型的说明,供大家参考。
不过还是有些地方没有搞明白,欢迎大家指教,不胜感激!
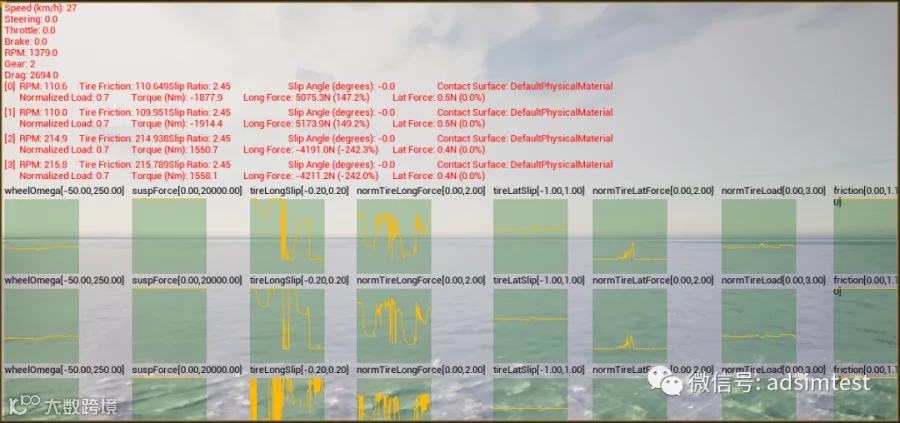
比如carla.WheelPhysicsControl中的tire_friction是什么作用?如何对carla.VehiclePhysicsControl中未列出的其他参数进行设置?如何获取SlipAngle/suspForce/normTireLatForce等内部参数?
这些信息可以通过Vehicle的show_debug_telemetry方法显示在渲染窗口,如下图所示:
下面是正文:
1.车辆模型
CARLA中的车辆模型包括3D模型和动力学模型两个方面。3D模型用于实现车辆的可视化渲染,可以在3D模型开发软件中设计、开发,并导入到虚幻引擎UE中使用。动力学模型用于实现车辆逼真的动态效果,CARLA中的车辆采用中的虚幻引擎UE中的AWheeledVehicle模型(核心是NVIDIA的PhysX模型)。下面对PhysX模型进行简要的说明。
参考了这些资料:
(1)Nvidia Physx文档:
https://gameworksdocs.nvidia.com/PhysX/4.1/documentation/physxguide/Manual/Vehicles.html#pxvehiclewheeldata
(2)Unreal Engine文档:
https://docs.unrealengine.com/4.26/en-US/InteractiveExperiences/Vehicles/VehicleUserGuide/
(3)carla文档:
https://carla.readthedocs.io/en/latest/core_actors/
PhysX中考虑了不同的车轮数量,但是为了说明的简单,本节将车辆简化为两轮模型,将车体(簧上质量)简化为前轴质量和后轴质量,通过并通过悬架与车轮(簧下质量)相连,如下图所示。
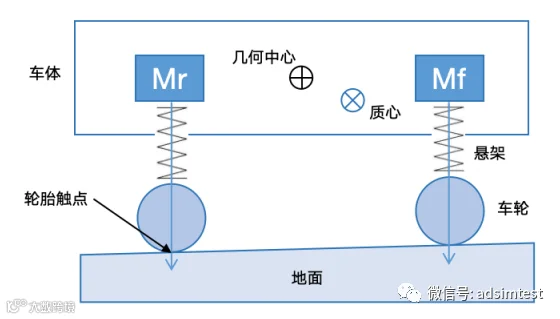
在静止状态下,由力平衡和力矩平衡可由下式得到:
式中M、Mf和Mr分别为总质量、前轴质量和后轴质量,Xcm、Xr和Xf分别为质心与几何中心的水平距离、前轴与几何中心的距离和后轴与几何中心的水平距离。
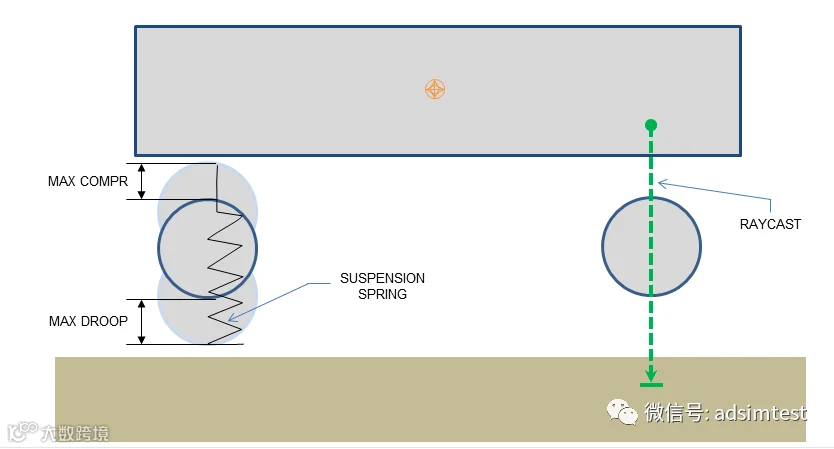
仿真运行进行更新时,首先采用光线投射方法(raycast),进行悬架位置的计算,如下图。将车轮与地面的接触位置简化为一个轮胎触点,光线投射从车轮最高点开始,并沿着悬架舒张方向向下投射到车轮最低点为止,计算出车辆与地面的接触点以及车轮的位置,进而计算悬架的压缩量和弹簧力,并结合驱动力和行驶阻力计算簧上质量和簧下质量所有受到的外力。然后便可建立车辆各部件的方程,对各种状态进行求解。
2.车辆的添加和使用
车辆Vehicle作为交通参与者Actor的重要类型,其使用方式也按照交通参与者Actor的三个步骤,即:选取蓝图并生成(spawning)、操作(handling)、销毁(destruction)。
(1)选取蓝图并生成(spawning)
生成交通参与者使用World的try_spawn_actor(blueprint, spwan_point)方法,该方法需要指定准备生成的交通参与者的蓝图blueprint以及生成的位置spwan_point。
代码的第16行,从蓝图库中获取了vehicle.tesla.model3作为我们准备生成的车型。代码的第19~33行通过全局变量SPAWN_POINT可以配置两种不同的生成位置获取方法:
①SPAWN_POINT为“spectator”时,在spectator当前的位置生成。观察者spectator是一个特殊的actor,用于调整CARLA渲染窗口的视角,该视角可以通过键盘上的W/A/S/D和鼠标拖动进行调整,也可以设置其位置和朝向,代码的第58~64行,设置观察者spectator跟随ego车辆的位置和朝向;
②SPAWN_POINT为“random”时,在预先定义的生成点中随机选择。为方便交通参与者的生成,CARLA的地图中提供了很多预先定义的生成点,这些生成点在地图上的所有范围都有分布,可通过代码第28~31行进行可视化,效果下图所示:

(2)操作(handling)
操作包含仿真运行期间所有对交通参与者的处理,如参数设置、状态获取和控制等。车辆Vehicle的属性和方法既包括交通参与者Actors公有的内容,也包含车辆Vehicle特有的内容。
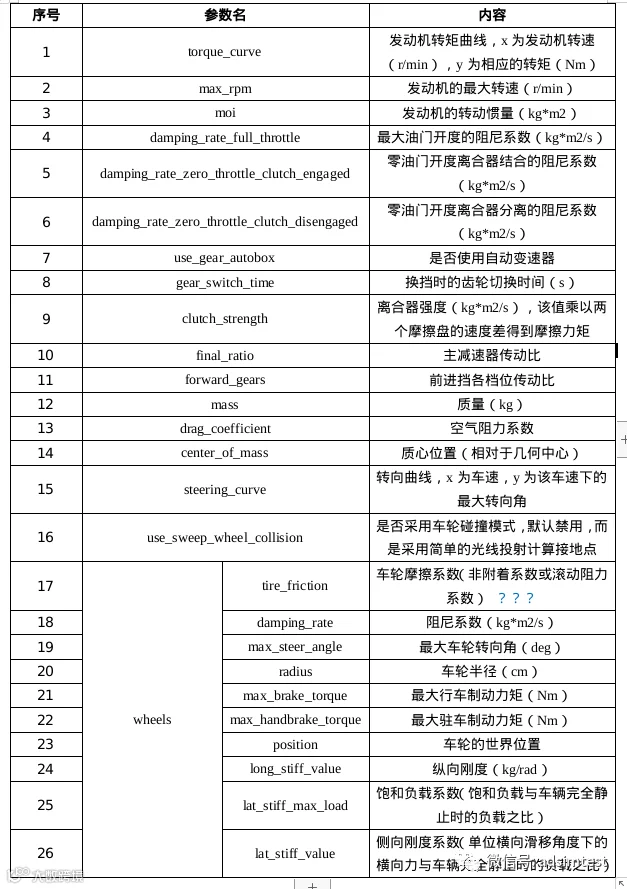
车辆模型的参数可参照第42~50行获取和设置。bounding_box是车辆的外接长方体,其bounding_box.extent属性中的x/y/z分别是几何中心距离三个面的距离,其实也就是长宽高的一半。get_physics_control()可获取车辆模型的物理参数,具体如下表所示:
CARLA中旋转部件(如发动机、车轮)在只受阻尼力矩时的,新角速度的计算公式为:
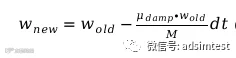
其中w_new和w_old分别为当前帧的新角速度与上一帧的旧角速度,u_damp为阻尼系数,M为转动惯量,dt为仿真步长。对于发动机,其阻尼系数根据油门开度的不同进行线性插值得到,如下式所示:

其中,u_damp为插值后的阻尼系数,离合器结合时u_zero为零油门开度离合器结合的阻尼系数damping_rate_zero_throttle_clutch_engaged,离合器分离时u_zero为零油门开度离合器分离的阻尼系数damping_rate_zero_throttle_clutch_disengaged,u_full为最大油门开度的阻尼系数damping_rate_full_throttle,a为油门开度。
轮胎的纵向力可由下式计算得到:
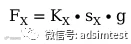
其中,K_X为纵向刚度long_stiff_value,s_X为弧度表示的纵向滑移角度,g为当前的重力加速度。
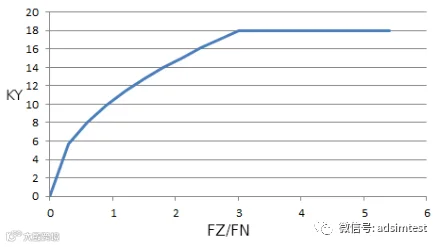
轮胎的侧向力可由下式计算得到:

其中,当轮胎的实际负载F_Z不小于饱和负载K_N*F_N时,K_Y为侧向刚度系数lat_stiff_value,当轮胎的实际负载小于饱和负载时,K_Y由平滑的插值得到(暂时没搞明白是怎么插值的)。一个插值的示例如下图所示,该示例中饱和负载时,K_N=3,K_Y=18。s_Y为弧度表示的侧向滑移角度,K_N为饱和负载系数lat_stiff_max_load,F_N为车辆完全静止时的车轮负载。
CARLA提供了不同的方法对车辆进行控制,如:
①采用Actor的方法进行控制,如通过set_target_velocity方法设置目标速度、通过set_transform方法设置位姿;
②采用Vehicle的apply_ackermann_control方法设置目标转向角、速度和加速度等;
③采用Vehicle的apply_control方法设置油门、制动和转向比例;
④设置车辆为自动驾驶模式,由Traffic Manager模块对车辆进行控制。
这四种方法在代码的66~83行进行了示例,并可通过全局变量CONTROL_MODE取值进行设置。
仿真运行中可获取车辆运行状态用于计算、显示等后续处理,代码85~91行对车辆的位姿、速度和加速度进行了获取和打印。
(3)销毁(destruction)
运行帧数大于10000后,跳出53行的while循环,在94行对车辆进行了销毁处理。
需要补充说明的是,本示例中采用了CARLA默认的异步变步长模式,仿真运行由CARLA的服务端Server自行触发,这样的话在客户端获取信息或者进行设置时需要等待触发才能生效,这就是代码中world.wait_for_tick()的用处所在。
代码如下:
import carlaimport random#设置ego生成位置的选择模式,"spectator" OR "random"SPAWN_POINT = "random"#设置ego的控制模式,"set_transform" OR "ackermann_control" OR "control" OR "autopilot"CONTROL_MODE = "autopilot"def main():#创建client,并获取worldclient = carla.Client("localhost", 2000)world = client.get_world()#设置ego的车型ego_bp = world.get_blueprint_library().find('vehicle.tesla.model3')ego_bp.set_attribute('role_name','ego')if SPAWN_POINT == "spectator":#选择当前spectator位置为ego生成位置spectator = world.get_spectator()spectator_tf = spectator.get_transform()spawn_point = spectator_tfelif SPAWN_POINT == "random":#随机选择预定义的生成点为ego生成位置spawn_points = world.get_map().get_spawn_points()# #生成点的可视化# for i, spawn_point in enumerate(spawn_points):# world.debug.draw_string(spawn_point.location, str(i), life_time=100)# world.debug.draw_arrow(spawn_point.location, spawn_point.location + spawn_point.get_forward_vector(), life_time=100)spawn_point = random.choice(spawn_points)#生成ego车ego_vehicle = world.try_spawn_actor(ego_bp, spawn_point)snap = world.wait_for_tick()init_frame = snap.framerun_frame = 0print(f"spawn ego vehicle at: {spawn_point}")#获取和设置车辆属性bbx = ego_vehicle.bounding_boxphysics = ego_vehicle.get_physics_control()print(f"bounding_box = {bbx}")print(f"physics = {physics}")physics.mass = 2000ego_vehicle.apply_physics_control(physics)ego_vehicle.set_light_state(carla.VehicleLightState.All)#采用默认的异步变步长模式while run_frame < 10000:snap = world.wait_for_tick()run_frame = snap.frame - init_frameprint(f"-- run_frame = {run_frame}")#设置spectator跟随ego车spectator = world.get_spectator()ego_tf = ego_vehicle.get_transform()spectator_tf = carla.Transform(ego_tf.location, ego_tf.rotation)spectator_tf.location += ego_tf.get_forward_vector() * (-10)spectator_tf.location += ego_tf.get_up_vector() * 3spectator.set_transform(spectator_tf)#控制车辆if CONTROL_MODE == "set_transform":new_ego_tf = carla.Transform(ego_tf.location, ego_tf.rotation)new_ego_tf.location += ego_tf.get_forward_vector() * 0.1ego_vehicle.set_transform(new_ego_tf)elif CONTROL_MODE == "ackermann_control":#ackermann_controlackermann_control = carla.VehicleAckermannControl()ackermann_control.speed = 5.0ego_vehicle.apply_ackermann_control(ackermann_control)elif CONTROL_MODE == "control":#controlcontrol = carla.VehicleControl()control.throttle = 0.3ego_vehicle.apply_control(control)else:#为ego车设置自动驾驶ego_vehicle.set_autopilot(True)#获取车辆状态transform = ego_vehicle.get_transform()velocity = ego_vehicle.get_velocity()acceleration = ego_vehicle.get_acceleration()print(f"-current transform = {transform}")print(f"-current velocity = {velocity}")print(f"-current acceleration = {acceleration}")#销毁车辆is_destroyed = ego_vehicle.destroy()if is_destroyed:print(f"ego_vehicle has been destroyed sucessfully")if __name__ == "__main__":main()
深信科创是一家专注于提供自动驾驶仿真及智慧交通解决方案的国家高新技术企业。公司基于人工智能、软件测试、数字孪生与大数据等技术,一直致力于自动驾驶领域的研发和探索,拥有一支高素质的研发团队,自主研发了自动驾驶仿真及数据闭环工具链SYNKROTRON® Oasis产品系列,能够提供高精度传感器模型、动力学模型及感知级交通环境仿真解决方案等,客户可以在仿真平台上对自动驾驶系统开展大规模的仿真测试和模型训练,提前识别自动驾驶系统缺陷、降低实车测试成本、消除场景端落地的安全隐患,加速自动驾驶技术在场景端的安全落地
