
近日,由国家自然科学基金委员会信息科学部和中国自动化学会共同主办的2023中国智能车大会暨国家智能车发展论坛在广州南沙滨海国际会议中心召开,郑南宁、张宏科、蒋昌俊、张平等数位院士齐聚,共商智能车技术及产业发展大计。

自动驾驶的安全控制需要在开发过程中进行大量的验证和确认(V&V),其中仿真测试多是基于场景来操作。V&V方法主要分成两种:形式化(formal)和采样。场景的采样方法一种是基于测试的采样,旨在最大限度地扩大场景覆盖范围;另一个是基于证伪的采样,旨在发现安全-紧要案例。为实现预期功能安全标准SOTIF的目标,基于证伪的采样更有探索能力。
深信科创从车端和云端提出两种数据筛选机制,更好地支持数据闭环平台上在自动驾驶研发和量产不同阶段下如何获取增量数据。其中影子模式、场景搜索和单类(one class)分类器在车端和云端以不同的算法实现筛选的力度和广度。
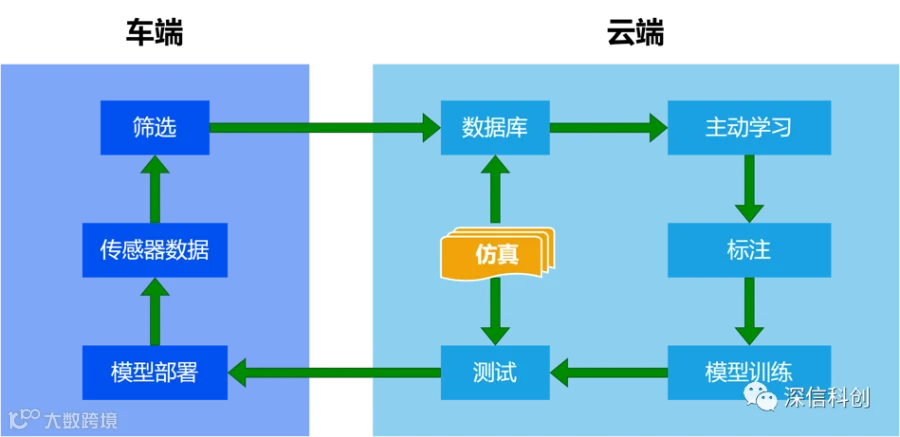 一个从车端到云端包括数据的采集、筛选、标注和模型的训练、测试和部署的数据闭环
一个从车端到云端包括数据的采集、筛选、标注和模型的训练、测试和部署的数据闭环
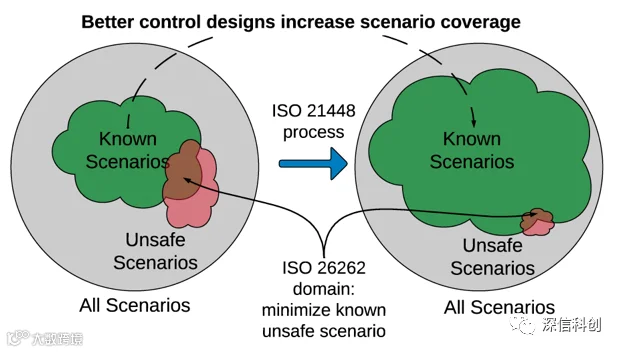 SOTIF的理念:最小化已知和未知的不安全区域
SOTIF的理念:最小化已知和未知的不安全区域
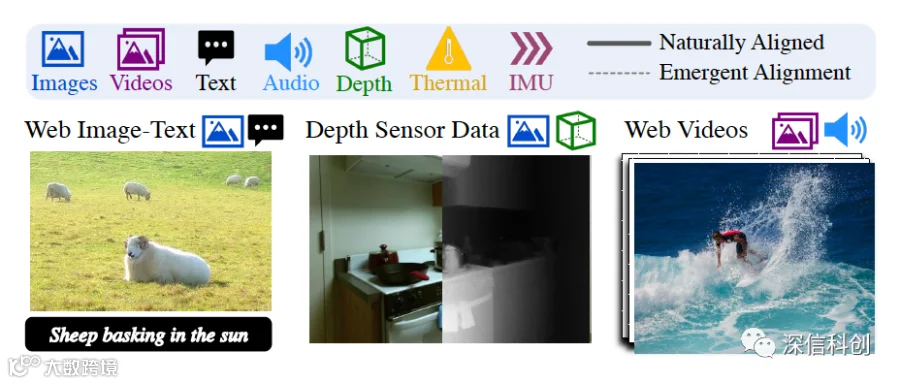 多模态(文字、语音、图像、视频、深度、热敏、惯导)大模型ImageBind
多模态(文字、语音、图像、视频、深度、热敏、惯导)大模型ImageBind
1、扫描二维码进行产品试用



继英伟达之后,深信科创成为CARLA第五位理事单位
深信科创亮相CICV 2023智能网联汽车决策与规划论坛
标准立项 | 自动驾驶交通流仿真系统
