
近日,深信科创与长安汽车AI Lab合作完成的《Adversarial Safety-Critical Scenario Generation using Naturalistic Human Driving Priors》(利用人类自然驾驶先验条件生成对抗性安全关键场景)论文,被 IEEE Transactions on Intelligent Vehicles (简称:IEEE TIV)正式录用,获智能汽车领域权威学术期刊认可。IEEE TIV是自动驾驶领域影响力最大的期刊之一(影响因子8.41,《期刊引用报告》 JCR Q1区) ,主要收录智能汽车领域——尤其是自动驾驶汽车领域——的先进理论和技术应用论文。
 论文链接:https://doi.org/10.1109/TIV.2023.3335862
论文链接:https://doi.org/10.1109/TIV.2023.3335862
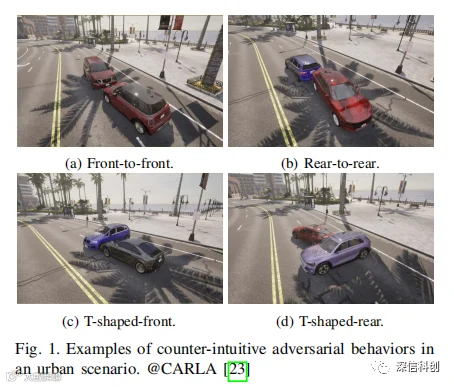 ▲图1 一些非自然对抗场景示例▲
▲图1 一些非自然对抗场景示例▲
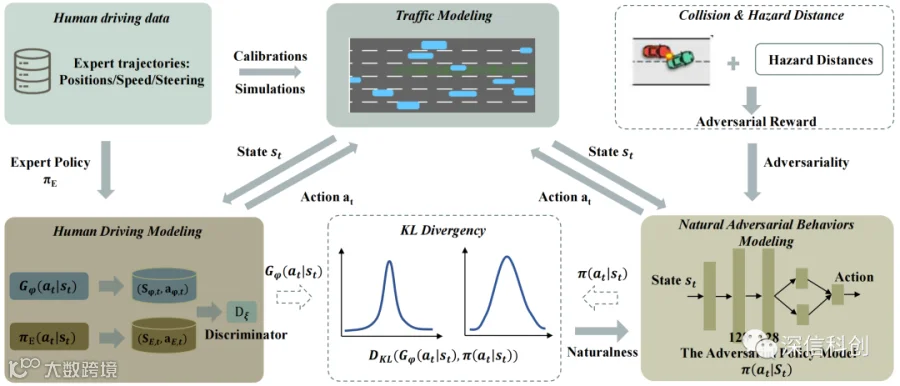 ▲图2 自动驾驶自然对抗测试场景生成方法的整体框架▲
▲图2 自动驾驶自然对抗测试场景生成方法的整体框架▲
01
交通流仿真环境建模
02
人类驾驶策略建模
通过利用GAIL(Generative Adversarial Imitation Learning 生成对抗模仿学习)算法训练自然交通流模型。研究人员可以利用GAIL框架对人类驾驶行为策略进行建模,通过生成器与判别器的不断对抗训练,生成器策略生成的数据分布会越来越接近真实的人类驾驶行为分布,从而实现对自然驾驶风格的建模。
03
自然对抗行为策略建模
进一步利用训练完成的自然交通流模型GAIL,来设计对抗测试场景生成算法。为了保证生成大量合理有效的自动驾驶测试场景,自然对抗场景生成算法既要保证智能体的对抗性,又要保证其在真实交通场景中的发生概率,即自然性,因此从自然性和对抗性两个方面来设计reward,以生成多样有效的对抗场景。
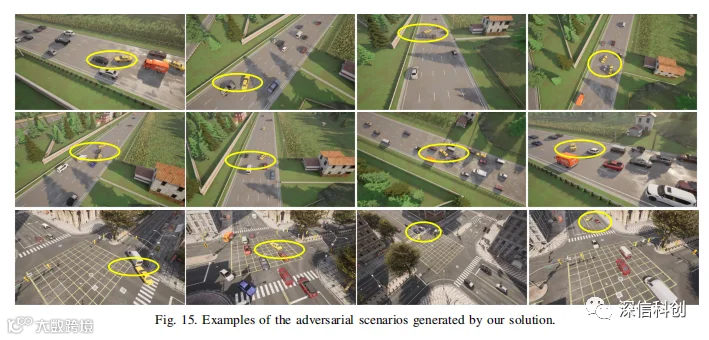
该方法的有效性在高速直道场景(NGSIM数据集)和城区十字路口场景(INTERACTION数据集)已被验证。与基线模型相比,在保证自然性和对抗性的同时,该方法将安全关键测试场景的生成效率提升了44%。



图灵奖得主姚期智等三位院士、陕西省科技厅厅长姜建春一行莅临深信科创

再获殊荣!深信科创荣获「年度智能汽车软件及数据工具链平台TOP10供应商」奖项
