
《Apollo&CARLA联合仿真》课程由深蓝学与深信科创联合推出,本系列课程旨在结合Apoll和CARLA进行联合仿真,完成对Apollo的各模块梳理任务,帮助高校学生及科研工作者款悉Apollo的开发流程以及仿真实践,降低学习门槛动驾驶功能验证,并给出示例在本课程中,您将会跟随课程熟悉整个Apollo的系统架构,了解如何搭建联合仿真进行至乘用车上,并完成实车的自动驾驶任务。
第一课,Apollo系统架构介绍
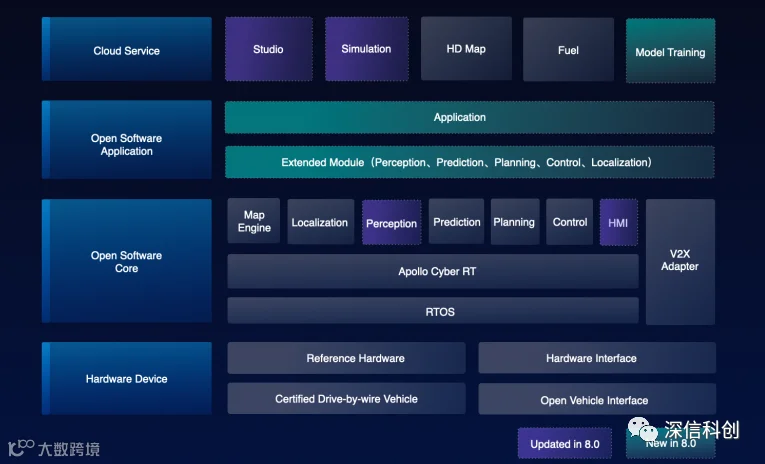
第一课主要讲Apollo系统架构介绍,Apollo作为一个开派自动驾驶平台,旨在为自动驾驶技术相关的研究人员及开发者提供一套完整平台框架pollo的开源代码包含定位、感知、预测、规划、制等自动驾驶多个核心模块组件,十分具有借鉴与参考意义。
学习目标
熟悉Apollo整体架构设计,了解各模块单元在自动驾驶体系中所发挥的作用。
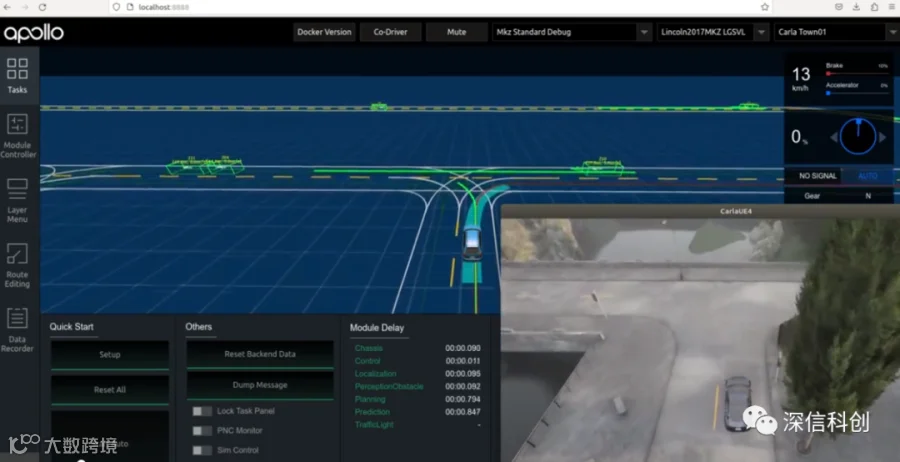
编译Apollo, 了解Apollo的基本操作, 基于提供的数据集完成Apollo系统的运行。
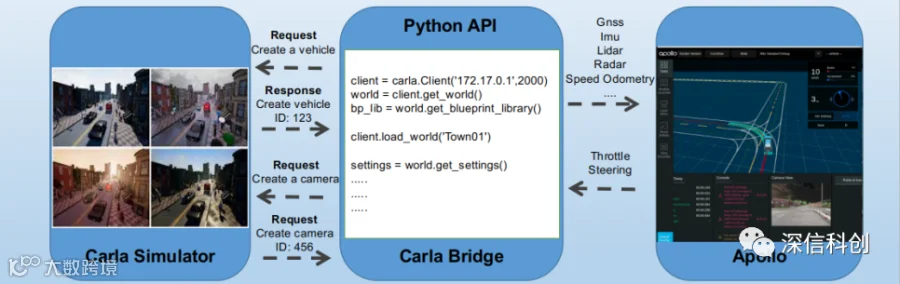
第二课,CARLA仿真环境搭建
第二课主要讲CARLA仿真环境搭建,Carla仿真器是基于UE4开发的开源无人驾驶仿真器,最新发布的0.9.15的新特性可以归结为三点:1、新的车型及地图。2、基于Omniverse的素材导入。3、基于OSM的三维场景生成。
学习目标
了解Carla仿真器环境基本配置, 学会搭建仿真环境。
搭建仿真车辆, 完成键盘控车行为及自动驾驶仿真。
接入Apollo系统, 实现Carla & Apollo联合仿真任务。
Apollo&CARLA联合仿真实践

更多详细课程内容,大家可以登陆深蓝学院继续学习!
也可以添加深信科创企业客服(synkrotron1)为好友,回复“课程学习”进群与其他开发者共同交流学习。


深信科创作为Carla开源自动驾驶仿真器全球五大理事单位的重要成员之一,与Intel英特尔、Toyota Research Institute丰田研究院、Futurewei华为美研院、NVIDIA英伟达等业界巨头保持紧密合作,共同规划Carla的技术生态和发展路线。为Carla贡献核心代码,积极参与社区运营和开发者培训,进而共同推动Carla生态的繁荣发展。
公司自主研发了自动驾驶仿真及数据闭环工具链SYNKROTRON® Oasis产品系列是Carla商业版的代表,可以为全球客户提供卓越的自动驾驶仿真服务,能够提供高精度传感器模型、动力学模型及感知级交通环境仿真解决方案等,使得在仿真平台上对自动驾驶系统开展大规模的仿真测试和模型训练,提前识别自动驾驶系统缺陷、降低实车测试成本、消除场景端落地的安全隐患,加速无人驾驶技术在场景端的安全落地。


图灵奖得主姚期智等三位院士、陕西省科技厅厅长姜建春一行莅临深信科创

再获殊荣!深信科创荣获「年度智能汽车软件及数据工具链平台TOP10供应商」奖项
