
数据闭环已经成为自动驾驶解决长尾问题的标配平台,本文(上、中、下)从几个方面讨论了构建数据闭环的关键要素:
1. 数据闭环的前提是要求自动驾驶解决方案是数据驱动的模型,而不是基于规则的;文中从感知、地图构建、定位、预测、规划和控制分别给出了数据驱动的深度学习模型范例;
2. 训练平台的建立:要求提供大规模数据的高效分布式深度学习训练能力;文中对云计算平台的基本技术做了介绍,包括资源管理调度、数据批处理/流处理、工作流管理、分布式计算、系统状态监控和数据库存储等,并对分布式深度学习平台给出讨论,如模型/数据并行,参数服务器PS/环状AllReduce等;
3. 数据平台的建立:数据筛选、清洗、挖掘和标注;特别是自动/半自动的数据标注能力,这里要参考特斯拉的工作(比如影子模式和离线/在线模型训练);
4. 仿真测试系统的建立:包括仿真平台和场景库建设;文中提到了诸如Carla等开源仿真平台,也介绍了测试的常用方法如SIL、HIL和VIL等;
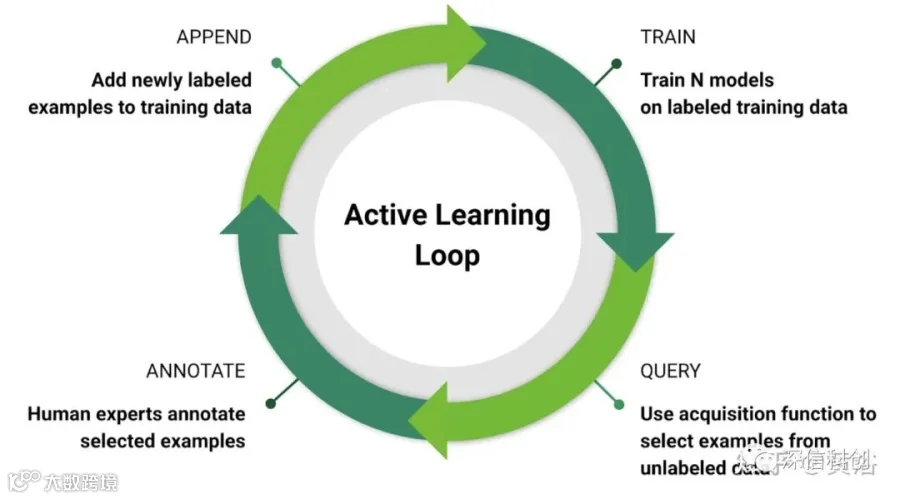
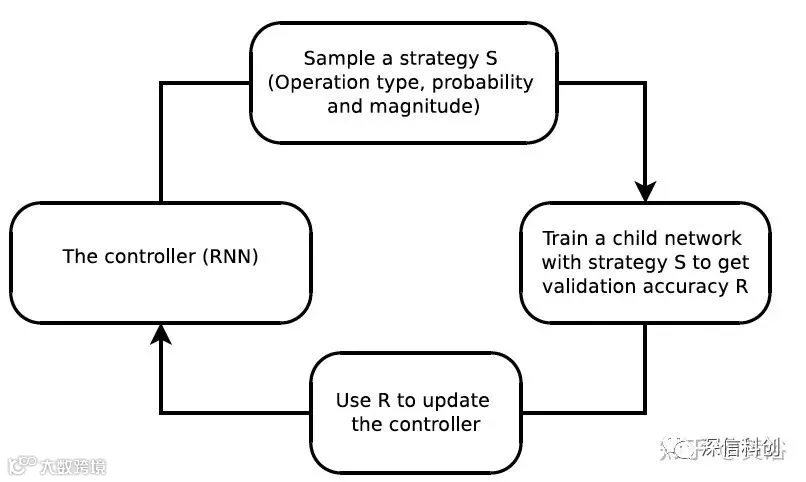
5. 最后提到数据闭环涉及的机器学习技术:比如利用不确定性估计挑选要标注的数据进入迭代更新的主动学习,用于数据筛选所涉及的corner case检测/OOD检测方法,模型训练的超参优化方法AutoML(NAS)和元学习(强化学习),以及可能会改变数据闭环前景的半监督/自监督学习理论、零样本/少样本学习以及持续学习/开放世界等(注:该文撰写于2021年,而两年后的2023年ChatGPT大模型出现,可以发现该文提到的思想早已在ChatGPT大模型中体现)。
相关的机器学习技术
-
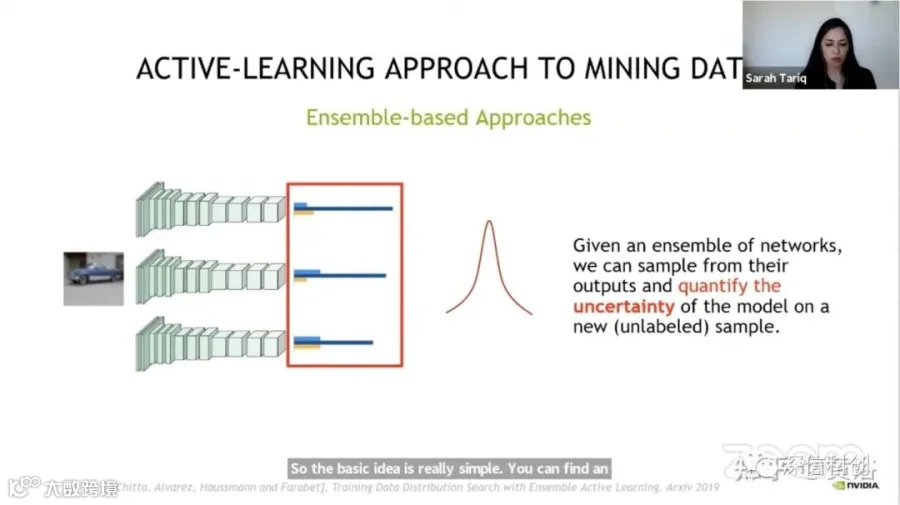
主动学习 -
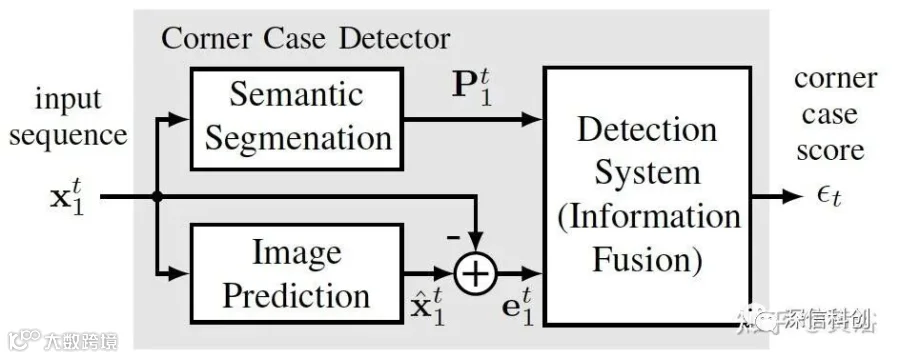
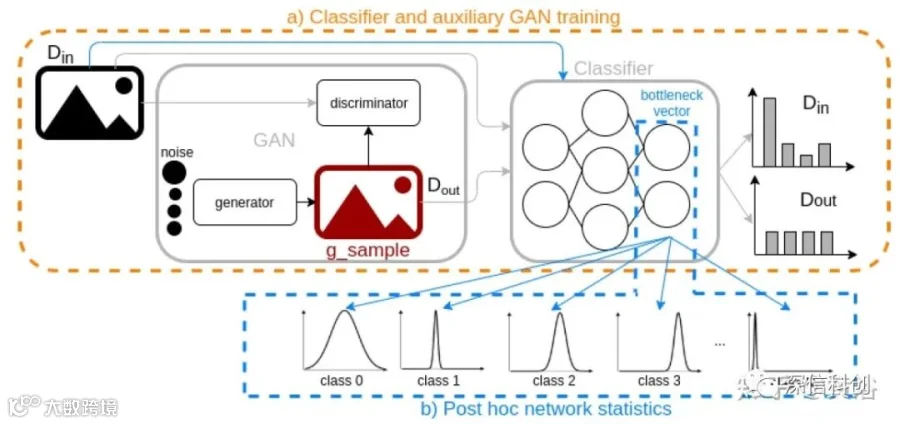
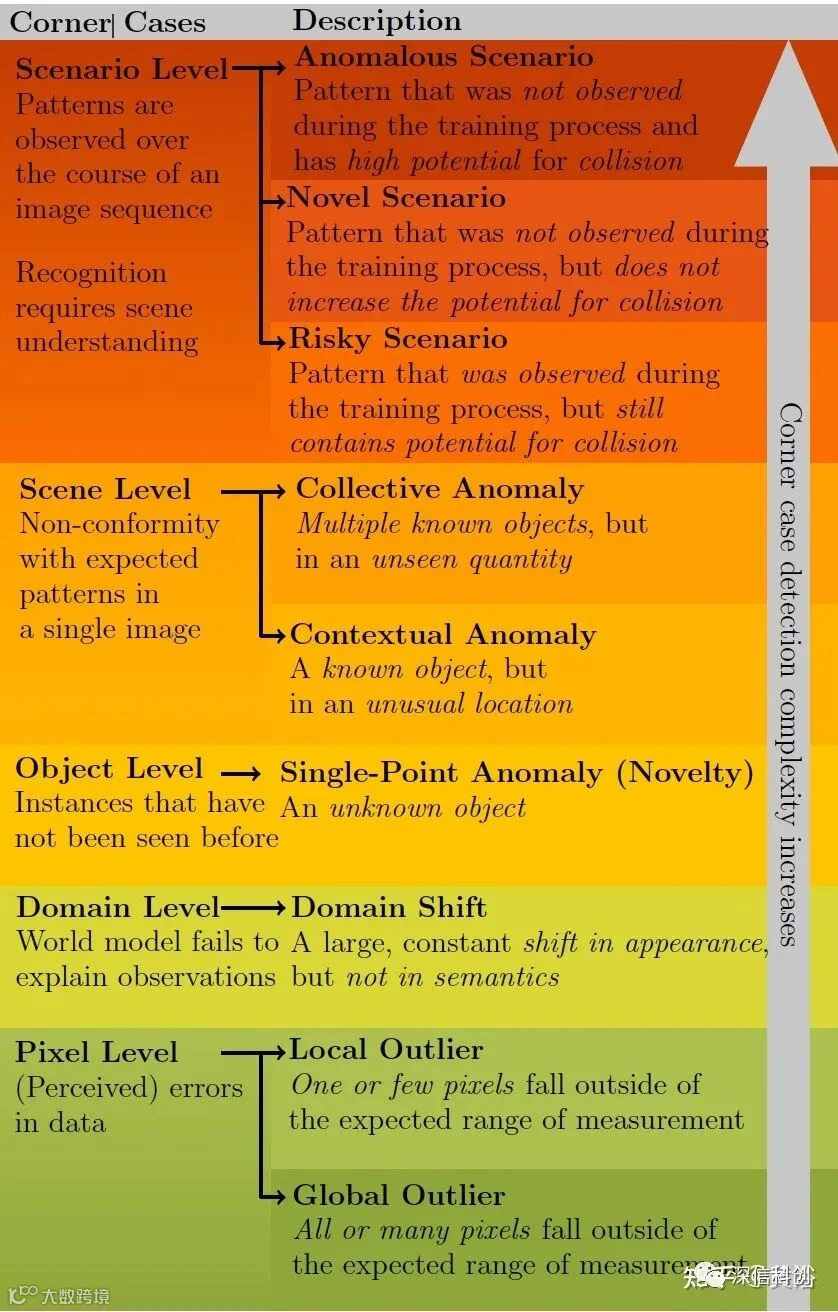
OOD检测和Corner Case检测 -
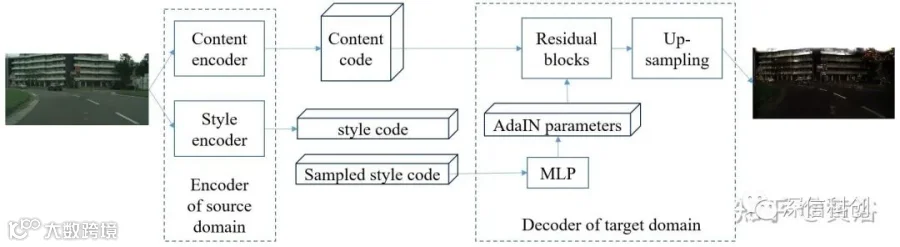
数据增强/对抗学习 -
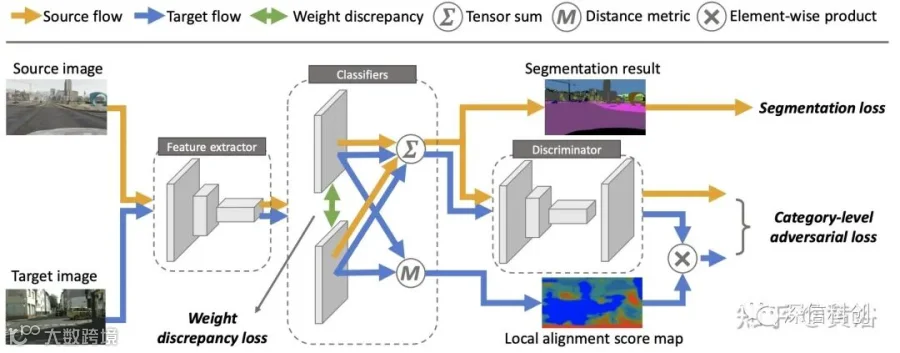
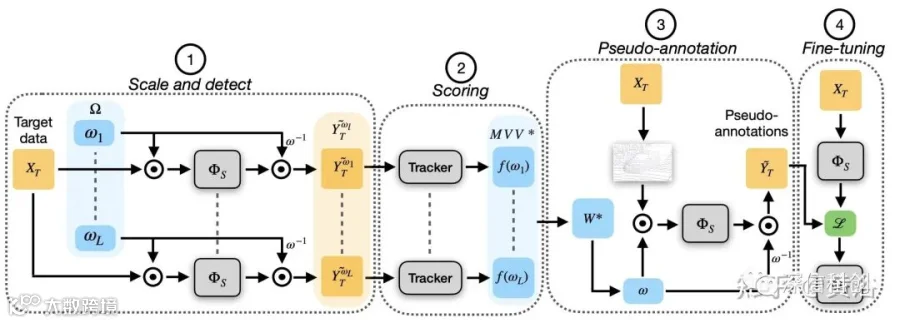
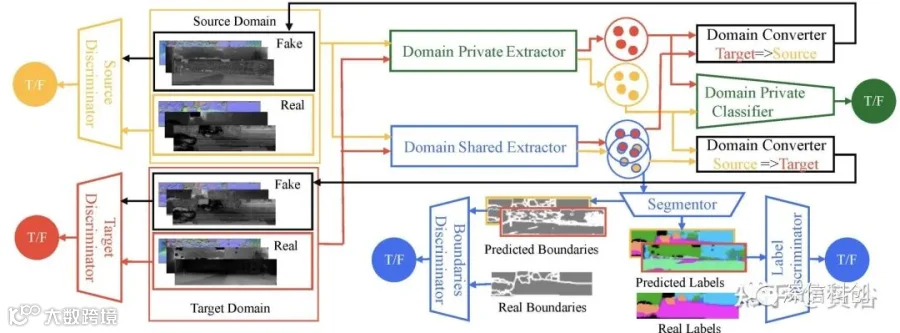
迁移学习/域自适应 -
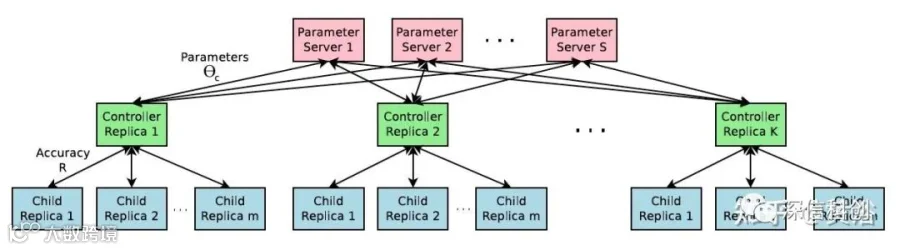
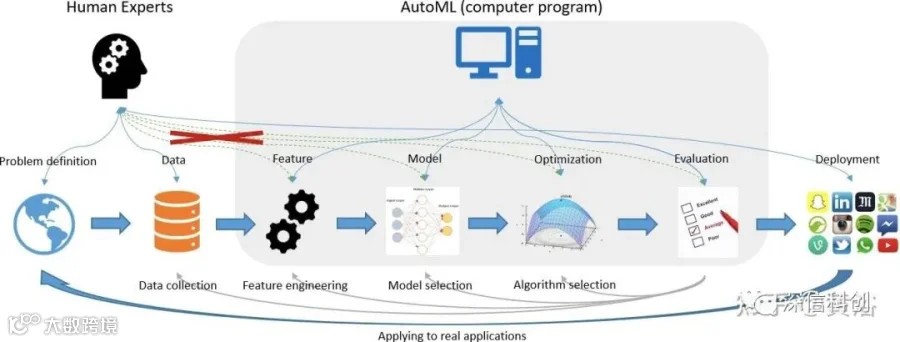
自动机器学习(AutoML )/元学习(学习如何学习) -
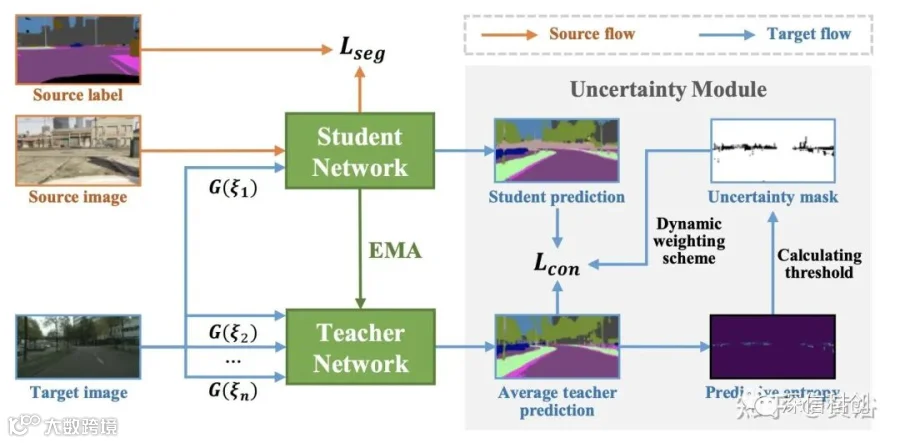
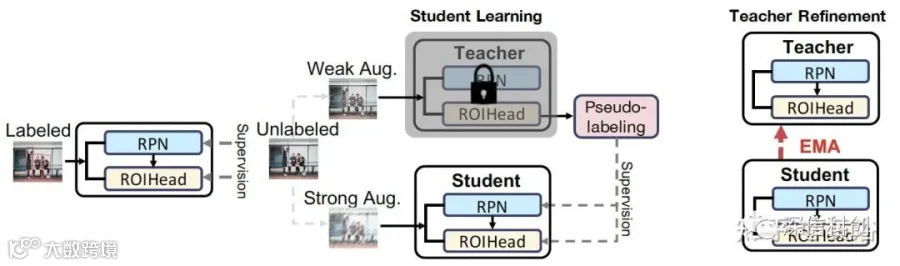
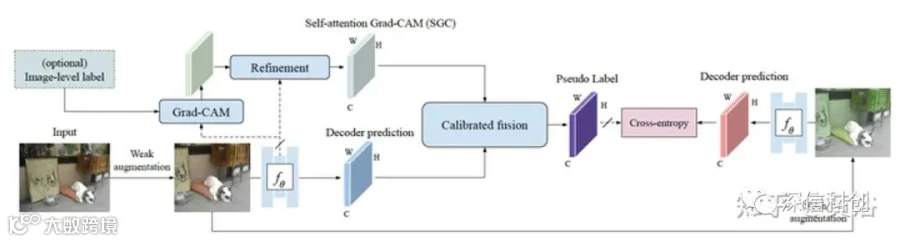
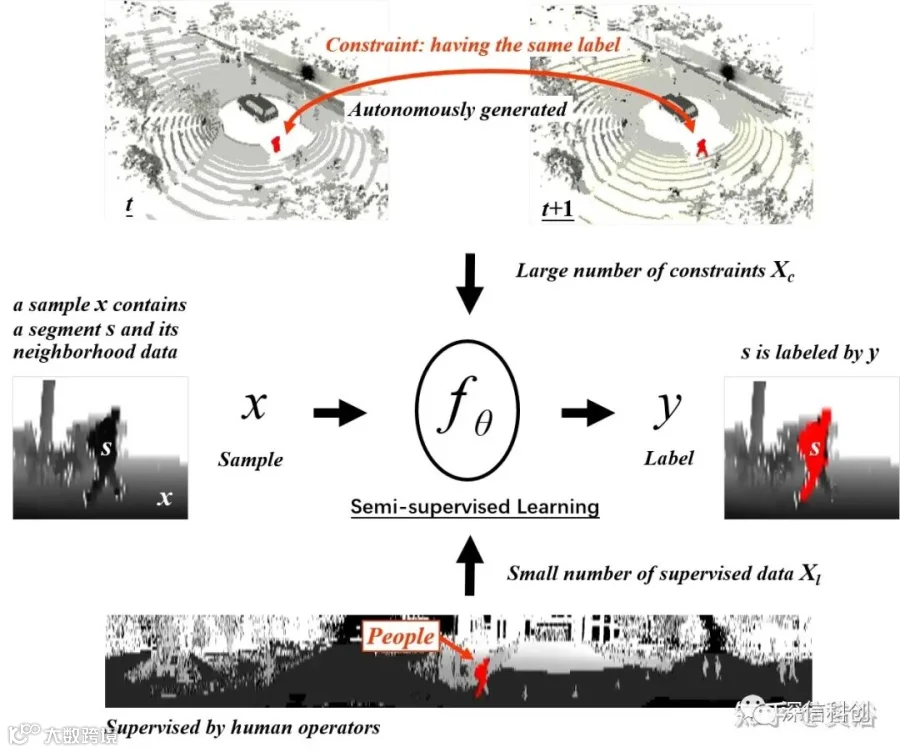
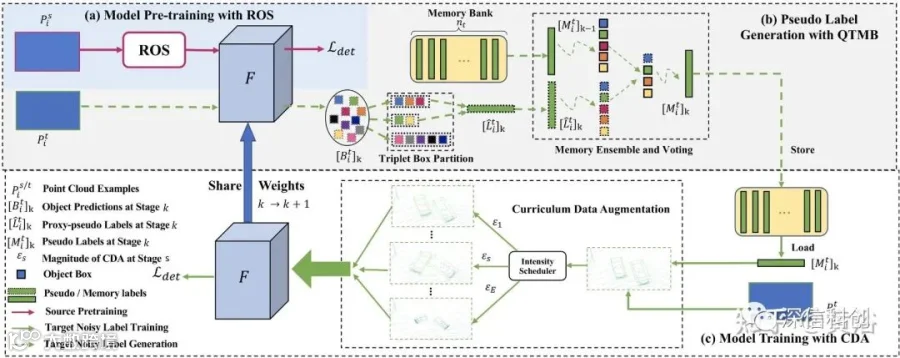
半监督学习 -
自监督学习 -
少样本/ 零样本学习 -
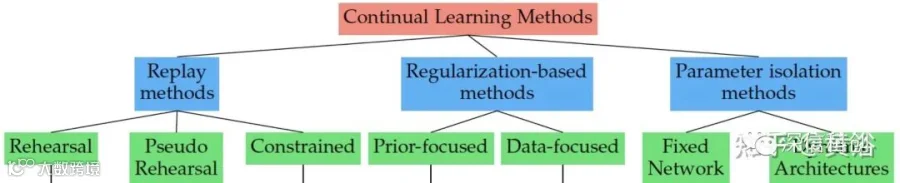
持续学习/开放世界
-
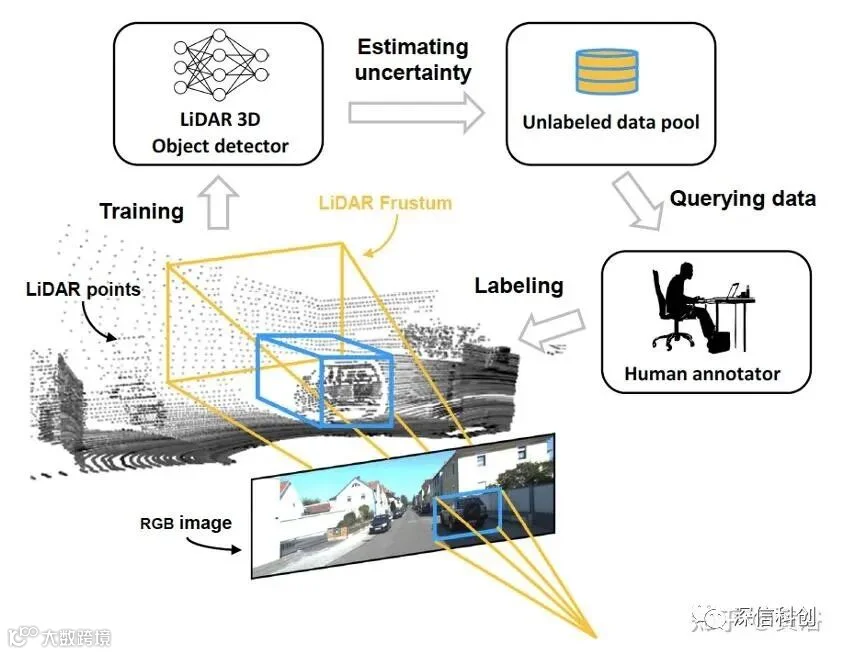
“Deep Active Learning for Efficient Training of a LiDAR 3D Object Detector”
-
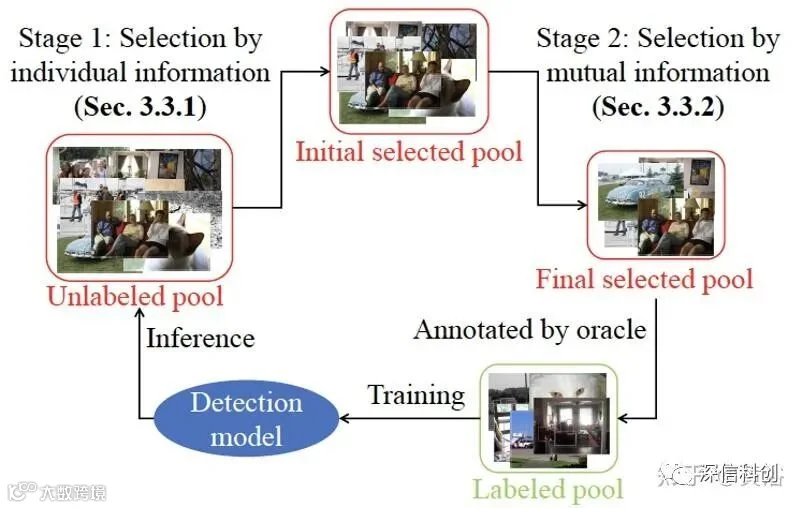
“Consistency-based Active Learning for Object Detection”
-
“Towards Corner Case Detection for Autonomous Driving”
-
“Out-of-Distribution Detection for Automotive Perception”
-
“Corner Cases for Visual Perception in Automated Driving: Some Guidance on Detection Approaches”
-
“AutoAugment: Learning Augmentation Strategies from Data”
-
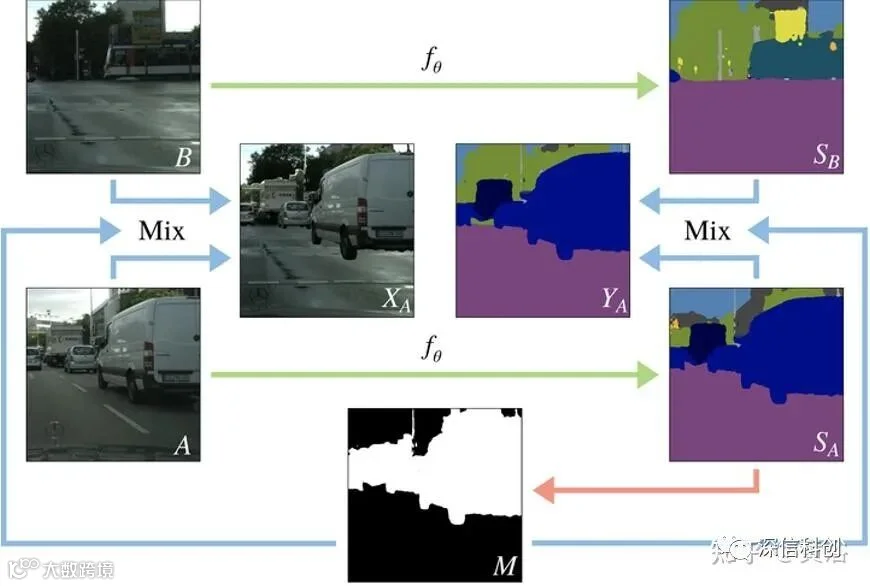
“Classmix: Segmentation-based Data Augmentation For Semi-supervised Learning”
-
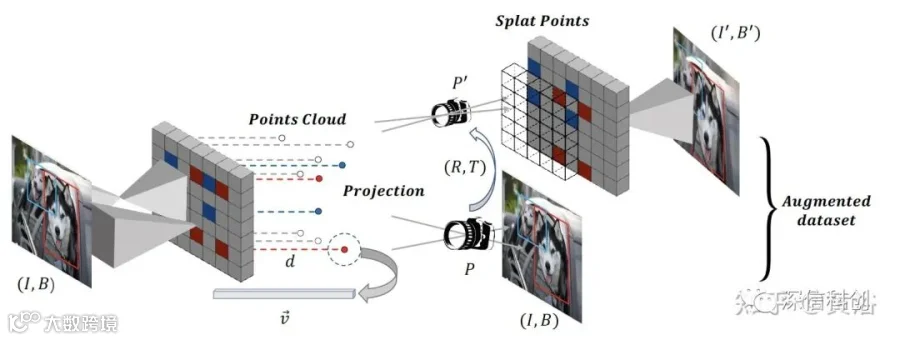
“Data Augmentation for Object Detection via Differentiable Neural Rendering”
-
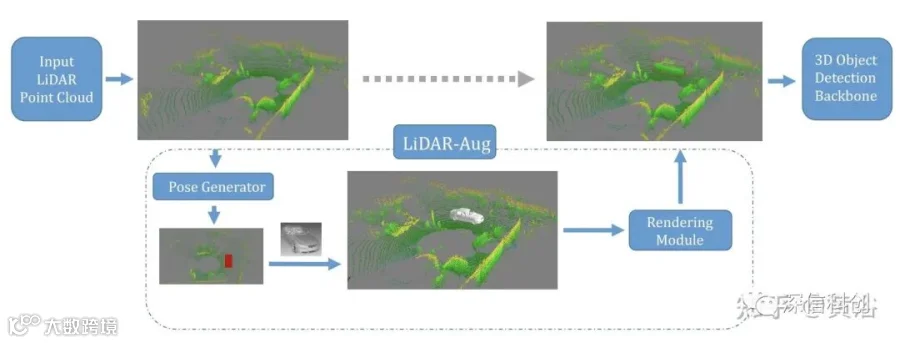
“LiDAR-Aug: A General Rendering-based Augmentation Framework for 3D Object Detection”
-
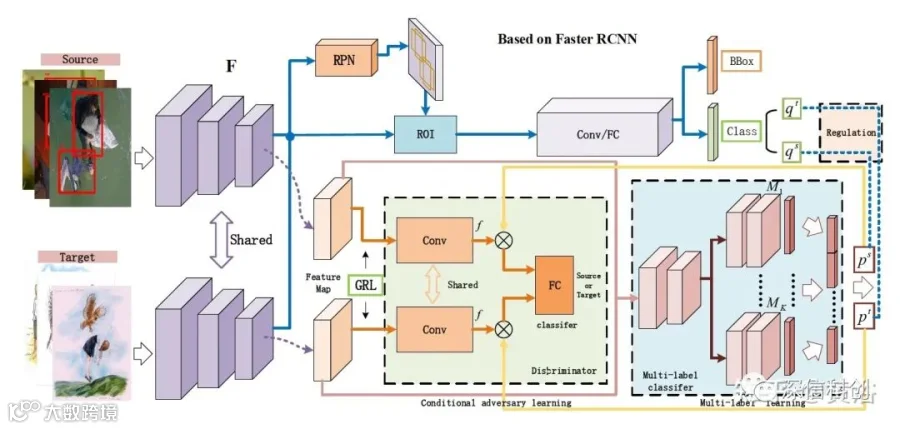
“Adaptive Object Detection with Dual Multi-Label Prediction”
-
“Taking A Closer Look at Domain Shift: Category-level Adversaries for Semantics Consistent Domain Adaptation”
-
“Multi-Target Domain Adaptation via Unsupervised Domain Classification for Weather Invariant Object Detection”
-
“Uncertainty-Aware Consistency Regularization for Cross-Domain Semantic Segmentation”
-
“SF-UDA3D: Source-Free Unsupervised Domain Adaptation for LiDAR-Based 3D Object Detection”
-
“LiDARNet: A Boundary-Aware Domain Adaptation Model for Point Cloud Semantic Segmentation”
-
用于配置评估(对于评估者); -
用于配置生成(用于优化器); -
用于动态配置的自适应。
-
“Pseudo-label: The simple and efficient semi-supervised learning method for deep neural networks” -
“Mean teachers are better role models: Weight-averaged consistency targets improve semi-supervised deep learning results” -
“Self-training with Noisy Student improves ImageNet classification”
-
“Unbiased Teacher for Semi-Supervised Object Detection”
-
“Pseudoseg: Designing Pseudo Labels For Semantic Segmentation”
-
“Semantic Segmentation of 3D LiDAR Data in Dynamic Scene Using Semi-supervised Learning”
-
“ST3D: Self-training for Unsupervised Domain Adaptation on 3D Object Detection”
-
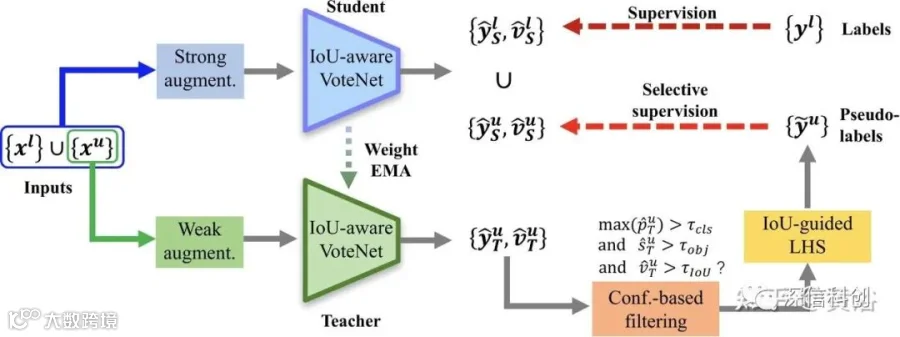
“3DIoUMatch: Leveraging IoU Prediction for Semi-Supervised 3D Object Detection”
-
“SimCLR-A Simple framework for contrastive learning of visual representations” -
“Momentum Contrast for Unsupervised Visual Representation Learning” -
“Bootstrap Your Own Latent: A New Approach to Self-Supervised Learning” -
“Deep Clustering for Unsupervised Learning of Visual Features” -
“Unsupervised Learning of Visual Features by Contrasting Cluster Assignments”
-
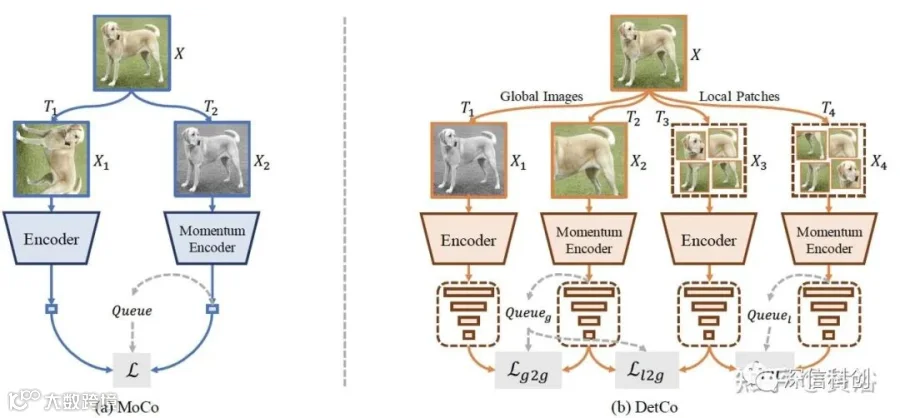
“DetCo: Unsupervised Contrastive Learning for Object Detection”
-
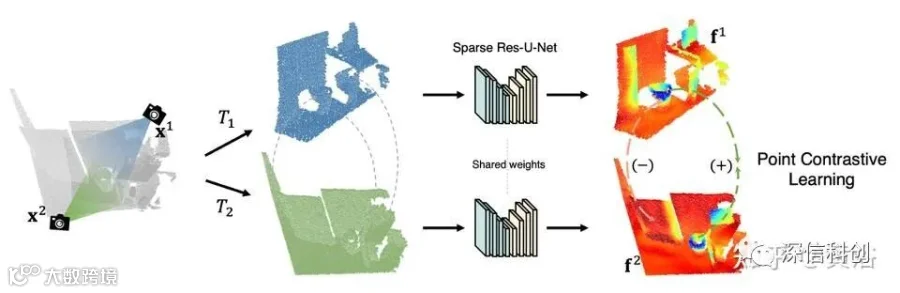
“PointContrast: Unsupervised Pre-training for 3D Point Cloud Understanding”
-
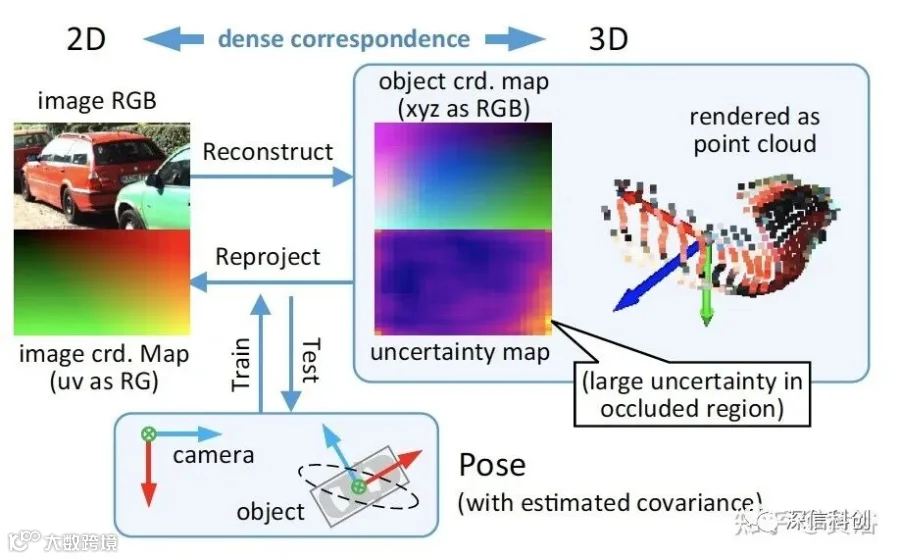
“MonoRUn: Monocular 3D Object Detection by Reconstruction and Uncertainty Propagation”
-
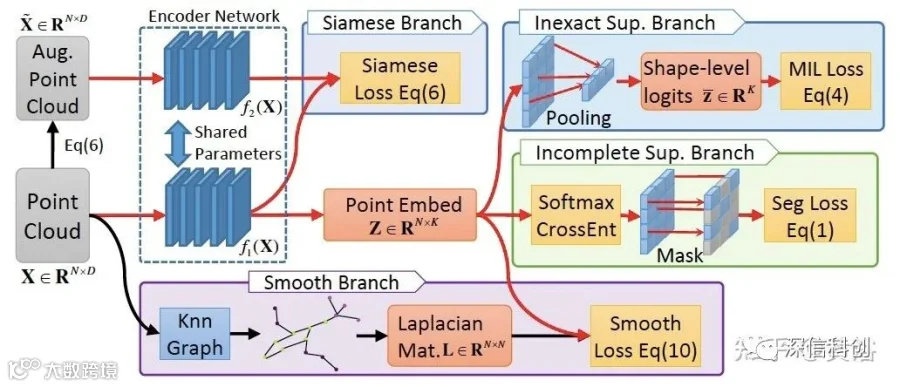
“Weakly Supervised Semantic Point Cloud Segmentation: Towards 10x Fewer Labels”
-
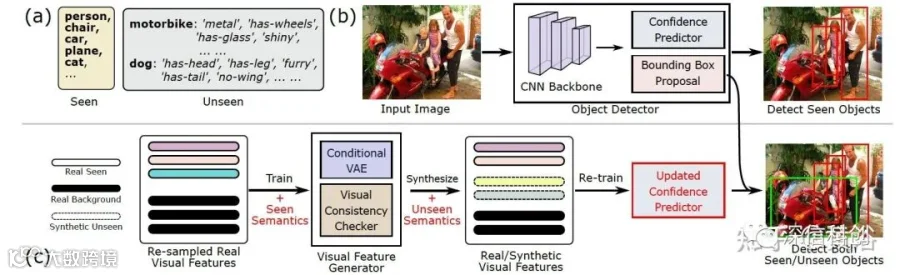
“Don’t Even Look Once: Synthesizing Features for Zero-Shot Detection”
-
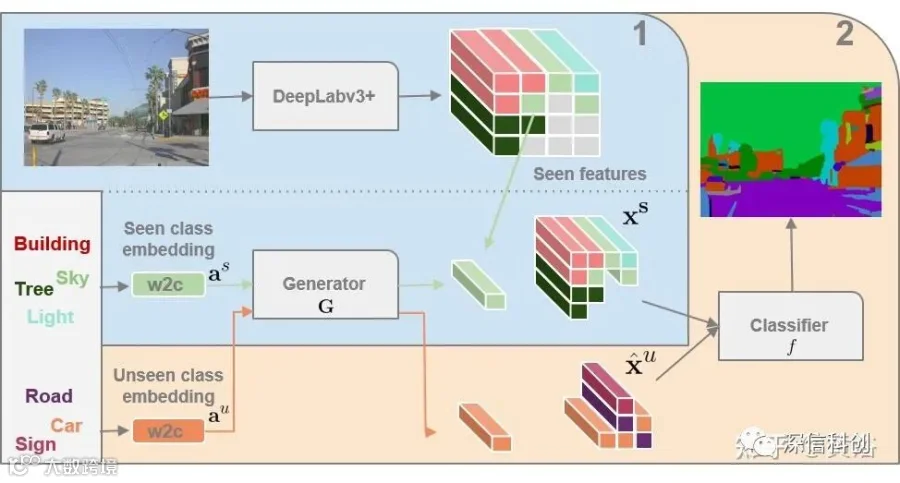
“Zero-Shot Semantic Segmentation”
-
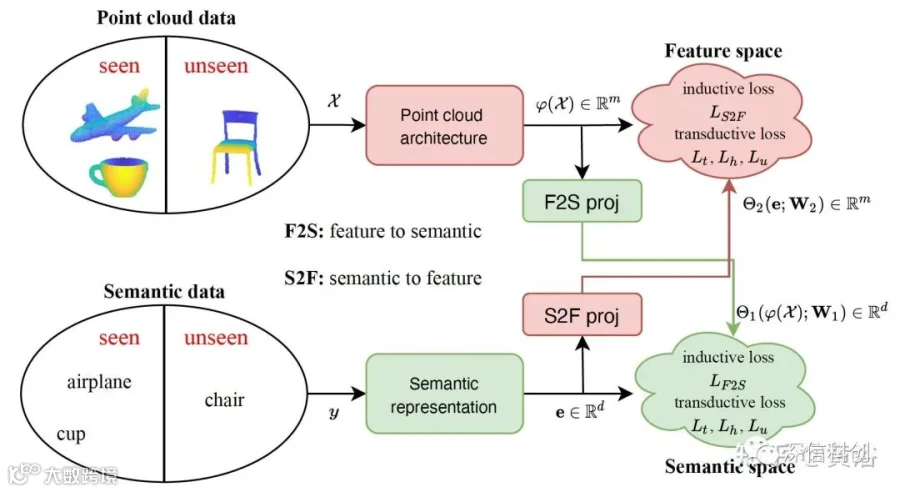
“Zero-Shot Learning on 3D Point Cloud Objects and Beyond”
-
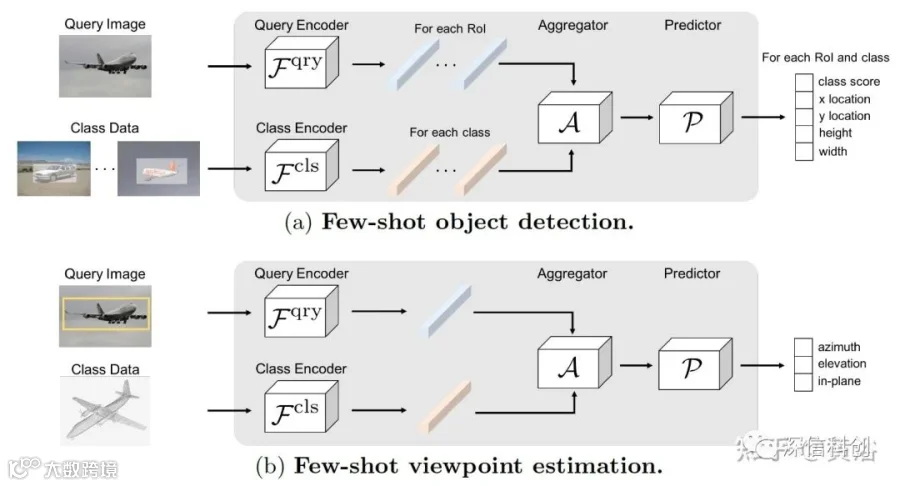
“Few-Shot Object Detection and Viewpoint Estimation for Objects in the Wild”
-
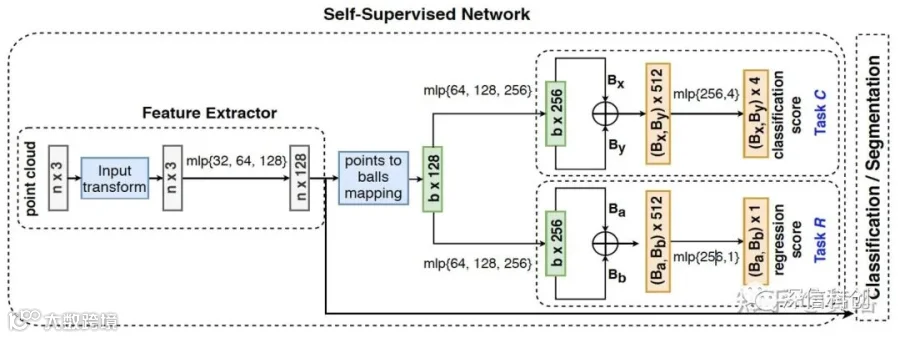
“Self-Supervised Few-Shot Learning on Point Clouds”
-
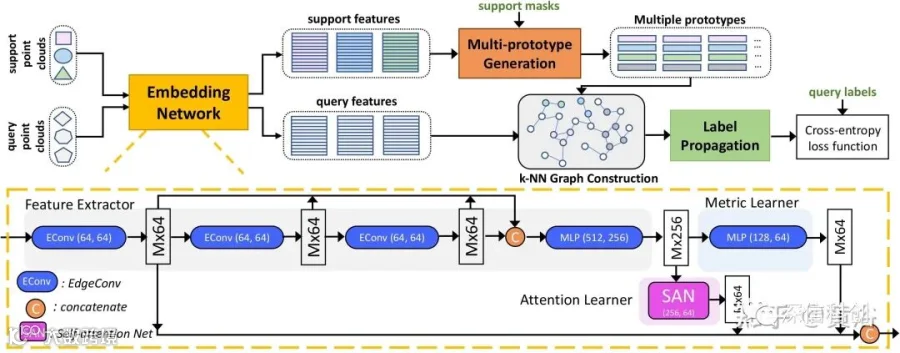
“Few-shot 3D Point Cloud Semantic Segmentation”
-
“Lifelong Object Detection”
-
“Incremental Few-Shot Object Detection”
-
“Towards Open World Object Detection”
-
“OpenGAN: Open-Set Recognition via Open Data Generation”

-
“Large-Scale Long-Tailed Recognition in an Open World”
-
数据的模式(摄像头/激光雷达/雷达,无/导航/高清地图,姿态定位精度,时间同步标记); -
数据驱动模型(模块/端到端); -
模型的架构(AutoML); -
模型训练的策略(数据选择)。
写在最后!
『深信科创Carla交流群』招募开始啦!欢迎各位喜欢使用Carla的爱好者入群进行交流哈~后期群里将会不定期分享与Carla有关的专业文章以及活动,也欢迎大家可以邀请身边感兴趣的朋友入群一起交流哈~

