
汽车盲区分为静态盲区、动态盲区,也就是商用车专业司机说的前轮盲区、后轮盲区。以下是上海豫兴测绘的不同车型静态盲区图。
乘用车盲区测试图

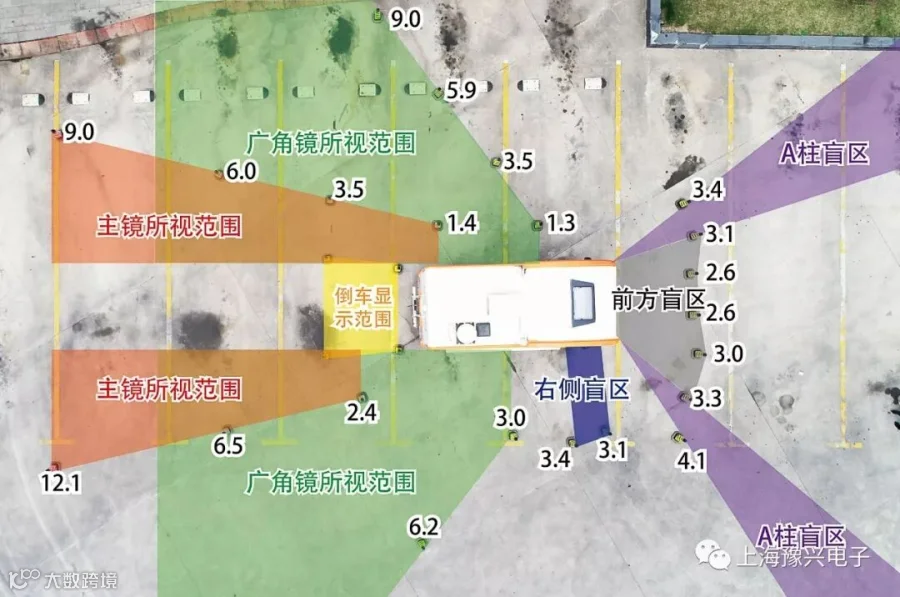
房车盲区测试图
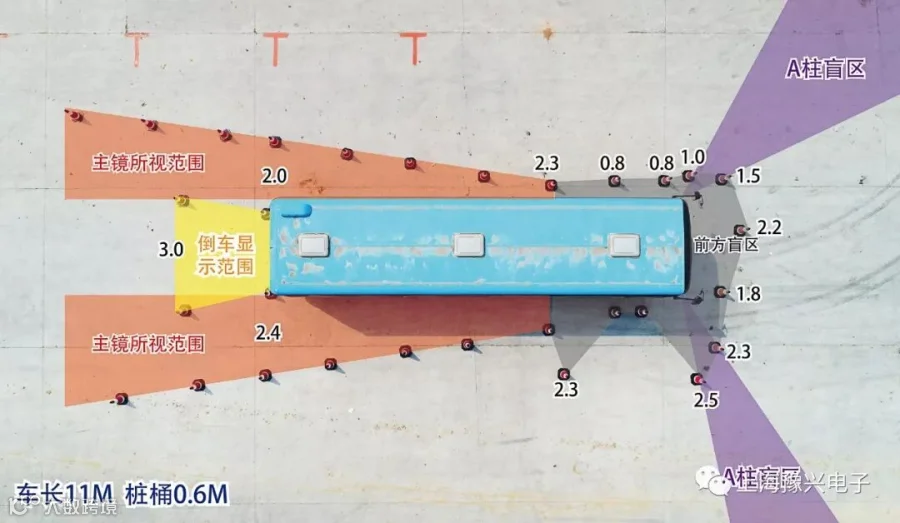
公交车盲区测试图
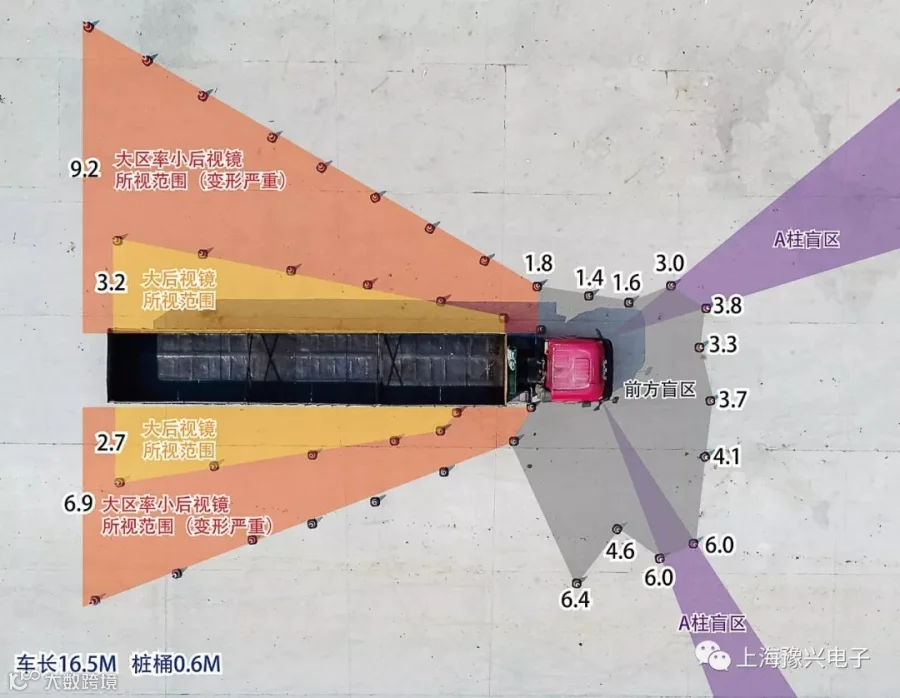
牵引车盲区测试图
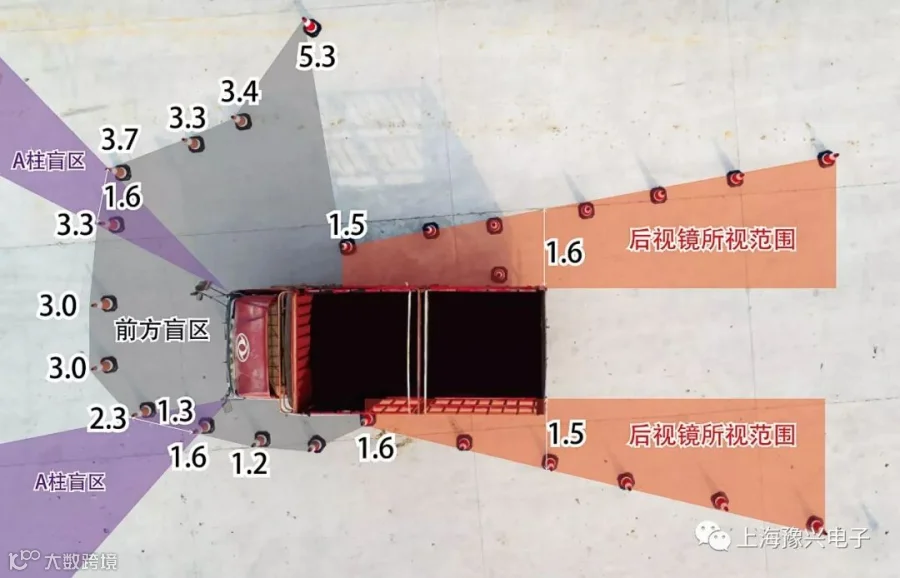
轻卡盲区测试图
汽车盲区事故四要素:
1. 人:驾驶员注意力分散导致没看到盲区风险。
2. 车:车辆造型设计形成的固有盲区。
3. 路:坡路、弯路、窄路、隔离带风道路附属物。
4. 环:环境的光线明暗、逆光、雨雪天气等。
商用车盲区解决方案必须从人、车、路、环四个因素入手,而不是简单解决车辆属性盲区,更应从车辆使用环境、驾驶员人机工程及公司管理多维度考虑。
主机厂靠增加不同曲率反光镜数量,解决车辆结构设计导致的盲区,但驾驶员在起步、倒车、转弯、变道秒极瞬间,没有足够时间观察N多反光镜并对每块镜子显示的场景快速综合分析,容易引发事故。这就是前面提到的盲区四要素中人的要素。

360环视最早出现在乘用车,用于车辆起步、辅助泊车。相比倒车后视,全景环视具有更好的车辆空间位置感,能辅助驾驶员对车辆周边障碍物距离做出大概判断,鸟瞰图优于单目摄像机图像画面的空间距离感知。
车辆周边空间距离感知、加上AI算法的赋能,近年环视在乘用车自动泊车得到广泛应用。
乘用车大多是工作、生活使用,驾驶员非专职驾驶,对起步、倒车需求很大。车辆高度低,如果匹配前后雷达,基本完全满足车辆的日常安全使用。
下图是豫兴公司16年销售的3D环视 ,在科帕奇SUV越野车安装效果图。

环视标定到如此程度已经非常好了,依然出现60厘米测试桩桶被拉伸变形严重,靠近车头两个桩桶被拉伸像两根柱子。

下图视频是2016年10月拍摄的宝马745Li环视,可以看到人在围着车走动会出现,时有时无的现象。这些问题虽然在这两年软件算法优化有改善,但依然存在,这是因为摄像机视角与算法融合产生的原因。
通过下面视频可以看到环视影像中人的物距和人眼看到物距的差异。
商用车因为车身长、宽、高都很大,前视、A柱、内轮差、后视盲区比乘用车大很多。商用车驾驶员都是专职,公交、客运对驾驶员驾龄及技能要求更高,需A1驾本才能上岗,所以发生起步、倒车事故相对乘用车要少,事故多发生在转弯、变道。
上海豫兴针对商用车环视不同产品方案进行装车测试。
1. 环视影像中人与物体
因摄像机是安装在高2-3米的大型车辆上,在采集视图范围增大、但显示器显示面积不增加情况下,环视影像中所有物体都会按照比例缩小(类似地图显示范围放大缩小效果),这样呈现在鸟瞰图或者3D视图中的物体、人会缩小甚至不能明显区分。

2. 环视盲区测试


3. 环视雨天晚上效果
环视安装在公交车(车长10.5-12.5米、宽2.5米、高3米),安装高度过高,摄像机采集范围增大,虚拟车模周边障碍物过多,导致密密麻麻都是影子,无法分辨具体障碍物位置。遇到路灯照射地面反光、雨天地面雨水反光画面。

下图是环视在卡车牵引车头应用,挂上挂车遮挡后视,仅作为车头局部近范围使用,但变形拉伸看不清楚车辆周边障碍物是什么。

4.测试结论
环视产品最大价值是在乘用车辅助或自动泊车,而不是商用车。
