

摘要:【背景】低空经济作为战略性新兴产业,依托低空飞行器技术重塑交通物流等领域,但规模化落地面临空域资源有限、运行调度复杂、时空资源协调难度大等一系列优化层面的挑战,亟需高效的建模与算法支持。【目标】系统综述低空经济中低空飞行器运行的优化方法研究进展,明确关键问题、模型方法及未来方向。【方法】综述以下三个层次的低空飞行器运行优化问题:战略层(基础设施选址、航路网络优化)、战术层(路径优化、协同路径优化)、运营层(实时路线规划、多交通主体协同机制、低空飞行器调度),总结对比分析各层优化模型与方法。【结论】现有研究在航路网络设计、多目标协同优化等方面取得进展,但仍需应对动态环境、不确定性和多主体协同等共性挑战。【应用】本综述可为低空飞行器运行下优化方法研究提供进一步的指导和参考。
关键词:智能交通;低空经济;设施选址;航路网络;路径优化
引言
随着低空飞行器技术的快速发展,在低空空域(3000 m 以下非管制区域)内,以低空飞行器为载体,开展多种场景下的低空飞行活动的低空经济正从概念走向现实,成为全球竞相布局的战略性新兴产业和未来经济增长的重要引擎。低空飞行器包括直升机、固定翼飞行器、电动垂直起降飞行器(eVTOL)、无人机(UAV)等,其中以 eVTOL 和 UAV 为代表的新型航空器,凭借其小型化、电动化、智能化、垂直起降能力等优势,正在深刻变革传统的交通物流、城市管理、农林作业、应急救援等领域。低空经济不仅有望构建“三维立体”的综合交通体系,有效缓解日益严峻的城市地面交通拥堵问题,更将催生万亿级规模的新市场,带动高端制造、信息通信、现代服务等产业链的全面升级,对培育新质生产力、提升社会运行效率、重塑区域发展格局具有重大战略意义。各国政府(如中国、美国),以及欧盟纷纷出台政策法规,加速低空空域开放与管理改革,如无人机交通管理(Unmanned Traffic Management,UTM)和城市空中交通(Urban Air Mobility,UAM)系统建设,为这一新兴经济形态的蓬勃发展铺平道路。同时,为充分利用国家空域资源,规范空域划设和管理使用,我国空管委组织制定了《国家空域基础分类方法》,将空域划分为 A、B、C、D、E、G、W 等 7 类,为规范化管理提供了重要依据。
然而,低空经济的规模化、商业化落地面临着一系列前所未有的复杂挑战。低空空域本身具有高度动态性、三维立体性、与城市环境紧密耦合的特点,同时需容纳性能、任务、优先级各异的大量飞行器(如载人 eVTOL、物流无人机、巡检无人机等),导致以下挑战:
(1)空域资源高度紧张:需要精细化网络设计、动态流量管理和高效协同机制以避免冲突。(2)基础设施需求迫切:垂直起降场(Vertiport)、物流枢纽的选址布局直接影响服务覆盖和运行效率。
(3)运行复杂度激增:单机/机队的实时路径规划需应对动态环境(天气、临时禁飞区、突发障碍物),多主体(eVTOL、UAV、地面车辆)协同调度难度大。
(4)多目标权衡困难:必须在追求运行效率(如最短时间、最低成本、最大吞吐量)的同时,绝对保障飞行安全(防碰撞、系统可靠性),并兼顾环境影响(噪音控制)、经济可行性以及社会公平性(服务可及性)。
(5)不确定性因素多:需求波动、天气变化、设备故障等要求系统具备高度鲁棒性和弹性。
面对低空经济高效、安全、规模化运行的复杂挑战,传统经验决策与简单规则已难以满足需求。系统化优化方法凭借精确的数学模型和高效的求解算法,能够在多重复杂约束下,寻找实现特定目标(如最小化成本、时间,最大化资源利用率、最小化风险)的(近似)最优决策方案,成为支撑低空经济健康发展的核心技术与研究热点。这一方法涵盖从战略层面的基础设施选址与航路网络设计,到战术层面的飞行器路径规划及飞行器-卡车协同优化,再到运营层面的实时路线规划与多智能体协同调度,全面推动低空经济的高效运行。
当前关于低空经济的学术综述主要集中在四大方向:技术发展现状(如飞行器设计、动力系统和通信导航等硬件技术)、政策与管理体系(包括空域开放、法规标准和监管框架)、应用场景分析(涵盖物流配送、城市交通和应急救援等商业化实践),以及特定层面的优化问题(如基础设施选址或路径规划)。然而,现有研究存在明显的局限性:各方向相对割裂,缺乏技术-政策-应用-优化的系统性整合;优化方法类综述多聚焦单一层面,未能构建战略-战术-运营的全层次优化框架。 本文系统综述低空经济背景下的低空飞行器运行多层次优化研究进展,构建“战略-战术-运营”全栈优化方法论体系。研究内容包括:
(1)清晰界定低空飞行器运行中不同层次(战略层、战术层、运营层)的关键优化问题。
(2)全面梳理应用于这些问题的核心优化模型与方法(数学规划、最优控制、启发式算法、强化学习、博弈论等),分析其适用性、优势与局限。
(3)总结当前研究的主要成果、典型应用场景(如城市空中交通、无人机物流、空地协同配送、巡检等)以及面临的共性挑战。
(4)展望未来研究方向,为低空飞行器运行优化理论的深化与工程实践的落地提供参考。
方法与数据
数据来源
本文基于 Web of Science 和 CNKI 数据库,系统梳理了 2000 年 1 月至 2025 年 4 月低空运行优化决策方法的研究进展。文献来源涵盖 SCI、EI、北大核心、CSCD、CSSCI 及 AMI 等权威索引,采用系统检索方法对中英文文献进行多维度分析最终确定以下检索条件,见表1。
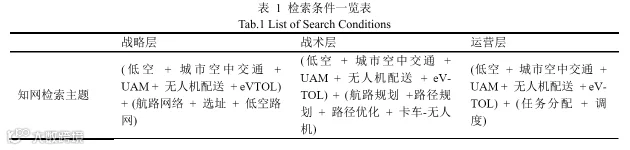
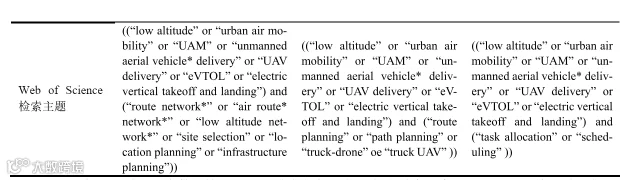
而后,本文通过人工审核、筛选处理,删除内容与本研究关联度不高、主题不匹配等无效文献,最终得到与战略层研究主题相关的文献:中文文献 25 篇,英文文献 56 篇;与战术层研究主题相关的文献:中文文献 55 篇,英文文献 216 篇;与运营层研究主题相关的文献:中文文献 48 篇,英文文献 157 篇。
研究方法
本文采用系统性综述方法,结合文献计量分析与深入文献阅读研究,识别低空经济背景下优化方法的研究热点并展望未来研究方向。基于文献计量分析的结论与详细文献阅读结果,对低空经济背景下优化方法的三个层次的研究热点分别进行了总结与整理,充分利用文献计量分析功能,对相关领域进行了年度发文趋势分析与讨论,最终提出了未来研究的前景与趋势。
1.2.1 年度发文量及变化趋势
年度发文量作为衡量研究活动活跃度的关键指标,能够直观地反映某一研究领域的研究热度与整体研究水平。将与低空飞行器运行优化方法相关性强的年度论文数量整理得到的年度发文分析如图 1。根据论文发表数量的变化可以看出,近六年来,随着各国大力发展低空经济,该领域的研究方法与技术也在快速迭代发展,大致可以分为 3 个阶段:
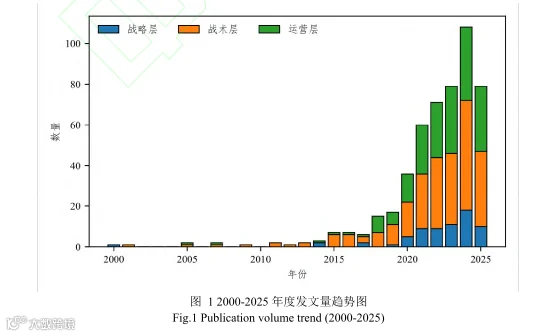
萌芽期(2000–2010):该阶段年均发文量不到 2 篇。这一时期体现出对飞行器可行性与城市着陆设施选址的早期关注。
加速期(2011–2018):这一阶段,年均发文量约 7.4 篇,比萌芽期增长 3.6 倍。遗传算法、蚁群算法等启发式技术被引入。
繁盛期(2019–至今):近年来低空经济研究呈现爆发式增长,年均发文量达 67.8 篇,其中 2024 年单年发文 108 篇,较 2018 年增长 7 倍。这一快速增长态势与国家政策推动密不可分:2021 年"低空经济"首次纳入国家规划;2023 年被列为战略性新兴产业;2024 年写入政府工作报告,并出台《通用航空装备创新应用实施方案(2024-2030 年)》,提出 2030 年形成万亿级市场规模的发展目标。
1.2.2 关键词共现分析
运用 VOSviewer 软件,我们对筛选后的文献进行关键词知识图谱分析,统计关键词的词频,并构建关键词共现网络图谱。为进一步制作主题高度聚焦优化方法的词云图,我们以词频统计列表为基础,手动甄别并剔除如“低空经济”背景词汇,以及其他与核心研究关联较弱的词语。
关键词作为文章主题的高度总结,通过统计分析关键词的共现频次,可以揭示低空经济领域下的热点话题和发展趋势,相关图谱信息见下表 2。
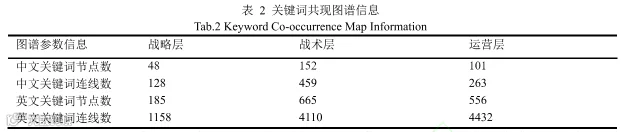
图 2 和图 3 分别为战略层中英文文献的关键词共现图谱,展现了无人机技术在农业、物流配送和城市空中交通(UAM)领域的交叉应用与研究热点。中文部分侧重于农业无人机的动力优化、物流配送(如全自动机场、分区域建设)及应急场景(如远程应急处置、多场景条件),并涉及算法支持(如 K-means 服务算法);英文部分则聚焦更广泛的空中交通系统,包括路径规划、物联网集成,同时强调人工智能技术(如神经网络)在优化(optimization)、空域容量管理及公平性(equity)中的作用。两者共同揭示了无人机技术向智能化(如 A+算法、迭代加权 K-means)、多场景协同(如应急演练、城市生态风险 eco-risk)及基础设施网络化(如节点 nodal 规划)的发展趋势,但英文部分更突出城市空中交通(UAM)的系统性挑战(如安全、可达性 accessibility)与算法创新。
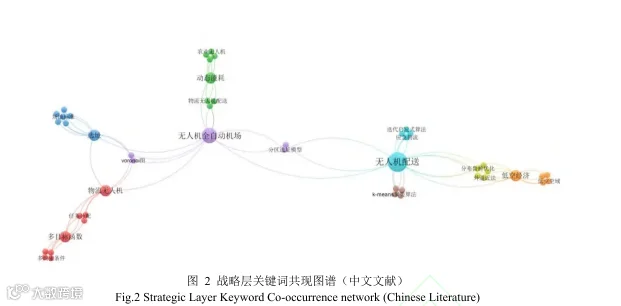
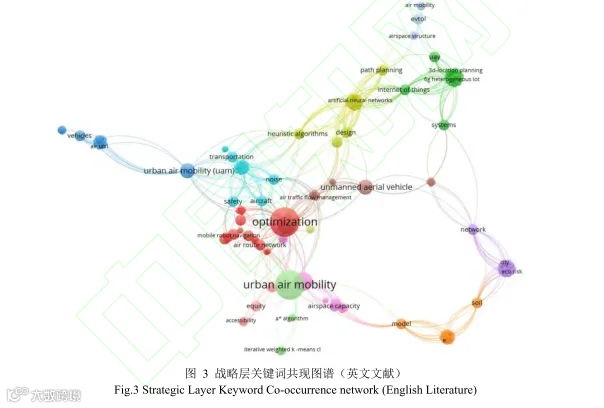
图 4 和图 5 分别为战术层中英文文献的关键词共现图谱,关键词共现词谱展示了一个以“路径规划”和“城市空中交通”为核心的复杂关系网络,与“算法”、“无人机”、“碰撞避免”和“优化”有密切联系。围绕“自主系统”、“深度学习”和“运动与路径规划”形成了显著的研究交叉集群。其他重要节点包括“无人机服务”、“空域容量”和“无人机配送”,表明了对无人机系统实用应用和技术的关注,而“3D飞行路径规划”和“数字地形模型”则突出了先进建模技术的整合。
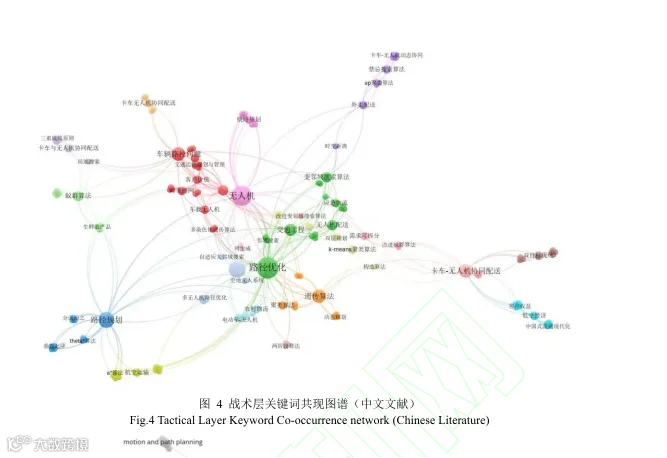
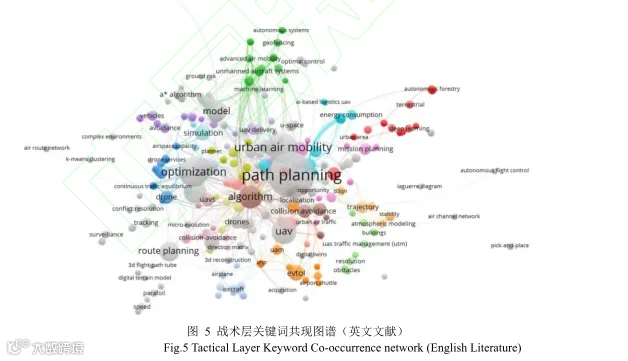
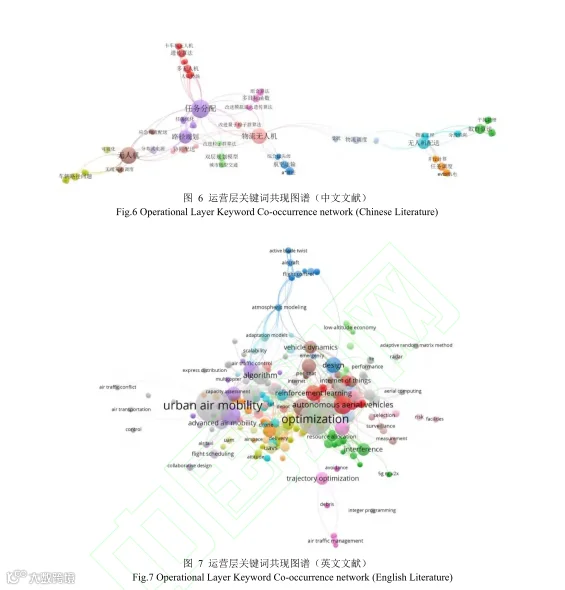
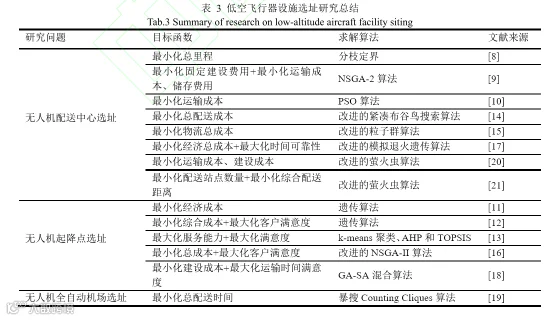
图 6 和图 7 分别为运营层中英文文献的关键词共现图谱,关键词共现词谱以“城市空中交通”和“优化”作为核心节点,呈现出复杂的关联网络,其中“算法”、“无人机(UAV)”和“轨迹优化”等关键词紧密相连,凸显了其在空中交通路径规划与资源管理中的关键作用;“自动驾驶飞行器”、“资源分配”和“干扰管理”构成显著的子集群,反映了智能调度、冲突避免及安全保障技术的深入应用;“低空经济”与“5G NR-V2X”连接紧密,表明了新兴经济模式与先进通信技术在城市空中交通中的推动作用;同时,“协同设计”、“飞行调度”和“大气建模”等节点进一步展示了技术开发与多场景适应的结合,如应急响应和低空物流优化;此外,“雷达”、“风险设施”和“碎片管理”等关键词提示了安全监控与环境适应性挑战,整体网络展现了城市空中交通向智能化、高效化、协同化及多场景适应的综合发展趋势。
战略层
本节从战略层面出发,系统探讨了两大核心问题:设施选址优化与航路网络优化。前者重点解决基础设施的空间布局问题,后者则致力于构建高效的空中连接网络。随着低空飞行器应用场景的日益多元化,航路网络规划已从初期的简单点对点路径优化,逐步演进为需要统筹三维空域结构、动态交通流量以及多主体协同管理的复杂系统工程。当前,通过智能算法的创新突破与多学科方法的交叉融合,研究者们正在着力攻克这一关键技术难题,为低空经济的规模化、商业化运营提供坚实的理论支撑和技术保障。
设施选址优化
设施选址问题作为典型的多韦伯问题,研究范围已从用户分配扩展至空间设施优化布局。根据空间特性,可建模为平面或离散空间的数学优化问题。通过综合考虑用户规模、设施数量、选址成本等因素,该问题表现为复杂的全局优化问题。若引入设施形态约束与用户需求异质性,计算复杂度将指数级增长。本章节聚焦低空经济下无人机物流中心及起降点的选址问题,系统综述相关研究。
当前国内外关于物流节点选址的研究主要集中于传统运输方式,主要围绕目标函数(单目标/多目标优化)、约束条件(确定性与不确定性环境)及算法应用(重心法、启发式算法等)展开,并在应急物流和鲁棒优化等特定领域取得进展。
该领域的研究不仅聚焦于传统的成本与效率优化,还充分考虑无人机独有的运行约束,如续航能力、空域限制和噪音影响等,并融合先进的智能算法以提升求解性能,形成了兼具理论价值与实践意义的丰富成果。
在模型构建和多目标优化中,部分研究致力于构建精确的数学规划模型,如以最小化网络总里程为目标的纯整数线性规划模型,并综合考虑投资预算、规模效益与网络抗毁性等多重约束。此外,智能优化算法的应用也日趋成熟。有研究结合选址特点,构建了包含固定建设费、存储管理费等多维成本的目标函数,并采用基于快速非支配排序的遗传算法(NSGA-2)进行求解。类似地,有学者运用粒子群优化(PSO)算法,通过构建运输成本最小化模型来优化物流中心的选址方案。针对不同物流场景的配送优化需求,研究者也提出了多种创新方法:在复杂地形区域,采用“非机动车-无人机-非机动车”的协同配送模式,构建以经济成本最小化为目标的无人机起降点选址模型,并设计遗传算法求解;针对城市末端配送,构建了同时优化成本和客户满意度的双目标模型,并通过遗传算法高效求解[12];更有研究提出混合选址策略,先通过 k-means 聚类结合多准则决策方法筛选候选点,再建立多目标模型进行最终优选,该方法特别考虑了无人机的运行特性和起降场限制条件。
在算法创新方面,研究者提出了多种优化方法应对不同场景的航路规划挑战。针对偏远地区物流,改进的紧凑型布谷鸟搜索算法(improved compact cuckoo search, icCS)通过混合采样和自适应机制提升了搜索性能,但在续航能力优化方面仍有改进空间。另有研究构建了整合运输难度、运载能力和枢纽分布的综合模型,采用融合高斯随机游走、气泡网攻击等策略的改进粒子群算法,有效平衡了全局探索与局部开发能力[15]。更先进的研究则开发了多目标优化框架,改进的 NSGA-II 算法结合多机型动态分配机制提升了系统适应性;而融合模拟退火与遗传算法的自适应方法,则通过优化内部机制,高效地平衡了经济成本与时间可靠性双重目标。
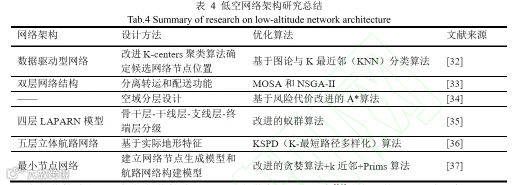
针对特殊地理环境下的规划需求,研究者提出了多种创新方法:在山区复杂地形场景下,建立了考虑建设成本和运输满意度的双目标优化模型,并开发了遗传算法-模拟退火混合优化算法实现高效求解;通过改进网格分区与泰森多边形方法相结合,构建了最小化总配送时间的混合整数规划模型,实现需求点的均衡覆盖;针对离散选址问题,改进的离散萤火虫算法有效解决了早熟收敛问题;同时,结合农村地形特点和无人机续航限制,采用分层序列法和改进萤火虫算法优化站点选址与区域划分。表 3 梳理了低空飞行器设施选址的研究问题、目标函数、求解算法。
在系统建模与评价体系研究方面,学者们取得了系列重要进展。通过系统比较六种聚类算法在垂直机场选址中的表现,构建了包含出行效率、可达性和公平性的多维评价体系,研究发现,K-means++算法在均衡分布和需求覆盖方面表现最优,且预飞行时间优化比单纯提高飞行速度更能改善系统整体效益。有研究提出了一种创新的两阶段优化方法,该方法通过迭代加权 k 均值聚类算法,结合不同交通方式的时间价值权重,实现了城市空中交通多式联运网络的高效整合。有研究提出了“枢纽-中转-终端”三级架构优化模型,通过引入精确的非线性能耗计算方法和双层遗传算法,实现了选址与路径的协同优化。针对城市空域管理的特殊性,基于 GIS 的标准化评估框架为不同区域(城市、郊区和远郊)的选址决策提供了系统化分析工具,有效解决了四维空间规划与现有空管体系的融合难题。
值得注意的是,社会接受度成为新的研究焦点。公众对 vertiport 的噪音、安全、隐私等问题的担忧可能影响选址决策,强调了社区参与的重要性。
总体而言,当前研究呈现出以下发展趋势:(1)从单目标向多目标优化转变;(2)从静态规划向动态响应发展;(3)从独立系统向多式联运网络演进;(4)从技术优化向社会接受度拓展。
低空航路网络规划与优化
低空环境相较于高空空域具有显著差异特征,主要体现在障碍物密集分布、通信需求动态多变、监管约束复杂等方面。这些特性使得构建安全、高效且可扩展的低空公共航路网络成为当前研究的重要课题。学术界和工业界主要从三个维度推进相关研究:网络架构设计、优化算法开发和技术整合应用,本文系统梳理了该领域的研究进展,深入分析了关键技术与方法,并对未来研究方向进行了展望。
城市交通网络设计(Urban Transportation Network Design Problem, UTNDP)可细分为道路网络设计(Road Network Design Problem, RNDP)、公交网络设计(Transit Network Design Problem, TNDP)和多模式网络设计(Multi-modal Network Design Problem, MMNDP)三类子问题。UTNDP 主要针对二维固定路网,旨在缓解交通拥堵并优化资源配置。其核心方法通常采用双层规划模型,结合用户均衡(User Equilibrium, UE)或系统均衡(System Optimum, SO)原理进行建模。求解方法包括精确算法(如分支定界法)以及启发式算法(如遗传算法、模拟退火、粒子群优化)。约束条件涵盖道路容量、预算限制、土地使用限制以及环境影响(如碳排放、噪声污染)等。
相比之下,低空航路网络优化聚焦于三维动态空域,涉及实时路径规划、冲突检测与避障(Conflict Detection and Resolution, CD&R)、能耗管理等关键挑战。其求解方法主要依赖强化学习(包括深度强化学习)、三维 A*算法以及蜂群优化算法(如人工蜂群算法、粒子群优化变种)。优化过程中需考虑空域管制(动态空域分配、禁飞区)、通信延迟、气象条件(如风速、气流)以及无人机性能限制(如电池续航、载重能力)等复杂约束。
在低空空域航路网络架构设计领域,针对空域环境的复杂性,研究者提出了系统的网络模型构建方法。首先,有研究对航路网络结构进行了明确定义,提出了包含航路、航路交叉口、航路节点、空域区域以及区域进出口等核心要素的框架体系。基于此框架,后续研究发展出三种典型网络架构:矩阵节点型、建筑节点型和道路沿线型,并通过容量与吞吐量指标进行了性能对比分析。为适应城市空中交通的多样化需求,研究者进一步提出了适应性城市空域(Adaptive Urban Airspace,AdUrA)概念,强调通过灵活的网络设计实现空域资源的优化配置。与道路交通领域网络结构存在着显著差异,后者通常被划分为四种基本类型:方格网式结构采用规则的几何布局,虽然能实现均衡的交通分配,但缺乏明确的中心节点;环形放射式结构以城市中心区为核心向外辐射延伸,通过环路实现区域连接,在提升中心区可达性的同时可能导致交通集聚效应;自由式结构则根据地形特征形成有机形态,展现出良好的空间适应性;混合式结构则综合运用多种类型。
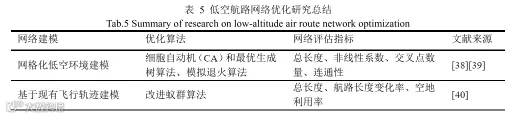
有研究[32]开创性地开展了自主无人驾驶飞机系统(UAS)航路网络结构建模研究:首先基于数据驱动方法在不影响现有空中交通的前提下筛选城市低空可行区域;随后运用改进 K-centers 聚类算法确定候选网络节点位置;最后结合图论与 K 最近邻(KNN)分类算法构建无人驾驶交通网络的航路结构。受地面交通治堵策略启发,分层道路网络可通过以下方式提升城市交通容量:高架快速路建于地面道路之上,通过分流不同规模的车流显著提高车辆通行效率,同时与地方路网无缝衔接保障整体连通性与可达性,研究者创新性地设计了一种双层网络结构,通过分离转运和配送功能,显著减少路径交叉点和总运输距离。为优化 eVTOL 航线网络,研究采用空域分层设计和风险量化方法,结合改进 A*算法构建了高效的城市空中航路网络[34]。最新研究提出了一种创新的四层级低空公共航路网络(LAPARN)模型,包含骨干层、干线层、支线层和终端层。为优化路径规划,该研究设计了改进的蚁群算法,通过整合动态步长调节、轮盘赌选择和贪婪策略,有效克服了传统算法容易陷入局部最优解的局限性。针对新加坡实际地形特征,有研究构建了一个垂直方向分为五层(150-250 英尺)的立体航路网络,并采用 KSPD(K-最短路径多样化)算法,在路径生成过程中同时考虑了噪声控制和运行效率的优化,实现了环境友好型与高效益航路方案的协同设计。此外,有研究通过改进贪婪算法生成最少网络节点,并结合 K-NN 和 Prims 算法实现干线与支线的协同规划。表 4 梳理了低空网络架构的设计方法、优化算法。
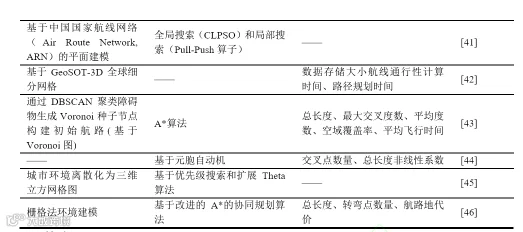
在优化算法方面,智能优化算法展现出强大潜力。早期研究建立了基于细胞自动机(CA)和最优生成树算法的两阶段优化框架。为适应实际物流需求,后续研究突破性地发展了“需求-拓扑”耦合优化理论,构建了包含网络结构优化层(采用多目标模拟退火算法 MOSA)和流量分配层的双层规划模型。另有研究提出创新的两阶段规划方法:第一阶段通过飞行路径合并生成初始网络框架,第二阶段采用改进蚁群算法实现全局避障和路径最短化优化。进一步的研究则提出了基于双目标优化的混合智能算法 MAPP,该算法巧妙结合了 CLPSO 全局搜索和 Pull-Push 局部优化策略,在中国国家航路网络的实际应用中取得了总成本降低 0.3%且冲突风险大幅下降的显著成效。
图论与组合优化方法在航路网络规划领域展现出显著优势,其中空间离散化处理方法尤为突出。在三维空域建模方面,有研究创新性地提出基于 GeoSOT-3D 全球细分网格的空间离散化方法,通过多级网格划分将复杂空间计算转化为高效数据库查询操作,显著提升了规划效率。另有研究采用Voronoi 图与 A*算法相结合的方案,先运用 DBSCAN 聚类处理障碍物并生成种子节点,再构建初始安全网络,为复杂环境下的路径规划提供了可靠解决方案。针对碎片化空域环境中的航路优化问题,最新研究开发了基于元胞自动机的网络优化方法。
为应对城市复杂环境,研究者开发了多种适应性技术。 在无人机配送航线网络方面,有研究提出基于航线优先级的规划方法,通过将多航线寻径问题解耦为有序的单航线寻径问题提升效率,并采用扩展 Theta 算法生成高效无冲突路径网络。在多无人机协同方面,有研究采用改进 A*算法进行协同规划,通过栅格法环境建模、估价函数优化和约束条件引入,实现多无人机的初始路径规划,并通过路径平滑、合并和终端区处理进一步优化网络结构。表5系统梳理了相关低空航路网络优化中的建模方法、算法和评估指标。
战术层
战术层研究紧密围绕低空经济运行核心需求,在低空飞行器路径优化领域,攻克复杂城市环境与风险场景下的路径规划难题;在卡车与低空载具协同方面,从单模式无人机或 eVTOL 与卡车的优势互补,到多模式异构机群的协同调度,构建起兼顾效率、成本与安全性的路径优化体系,为低空物流配送、应急救援等场景提供了坚实的技术支撑。
低空飞行器路径优化算法研究
低空飞行器路径规划问题相较于传统车辆路径问题(VRP)具有更高的动态复杂性和多维优化需求。与地面运输系统相比,低空飞行器路径规划系统需要具备实时动态响应能力,以应对飞行过程中的各种突发状况和任务变更要求。在优化目标方面,低空飞行器路径规划往往需要综合考虑多目标协同优化,包括但不限于单机运营成本最小化、作业收益最大化、飞行安全性能提升、任务完成时效性保障以及系统整体运输效能优化等多个维度。
在城市低空经济背景下,低空飞行器的路径优化充当着重要的角色,目前针对低空飞行器路径优化算法主要分类如下图 8:
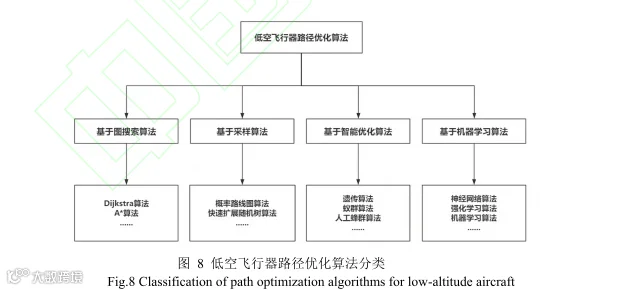
3.1.1 基于图搜索路径规划算法
Dijkstra 算法因其在路由规划、地理信息系统(GIS)和导航系统中的广泛应用而备受关注,但传统实现方式在处理大规模场景时常遭遇效率瓶颈。为此,研究者提出了多种优化方案,例如通过融合红外技术增强无人机的避障能力,展现了多技术协同的应用趋势。这些改进显著提升了算法性能,拓展了应用场景,为大规模路径规划提供了新的思路。
A*算法作为一种高效的启发式搜索算法,广泛应用于路径规划领域,但传统实现常因搜索效率较低和对启发函数的强依赖而受到限制。为解决这些问题,研究人员开发了多种优化方案。针对低空无人机在三维战场环境下的路径规划,提出了一种改进的 A*算法,满足安全性、升降率和转弯半径等性能要求。通过优化复杂场景的搜索空间,开发了一种三维路径规划算法。这些优化有效提升了算法性能,拓宽了应用场景,为复杂环境下的路径规划提供了创新方案。
3.1.2 基于采样的路径规划算法
概率路线图(PRM)算法因其良好的可扩展性和对复杂环境的适应性,广泛应用于路径规划领域。但其仍存在计算效率低、参数敏感性强等局限性。具体而言,该算法依赖大量随机采样来构建搜索空间,且难以动态识别快速变化区域或高风险路径。为应对这些挑战,有研究采用局部敏感哈希算法替代传统的最近邻搜索,显著提升了路线图构建的效率。这些改进方法有效提升了 PRM 算法的性能和实用性。
快速扩展随机树(RRT)算法作为一种基于随机采样的路径规划方法,以无需环境预处理的特性著称,通过随机生成节点并结合碰撞检测构建搜索树。然而,传统 RRT 算法在复杂环境中存在一定局限性,为此研究者提出了多种优化方案。在无人机路径规划领域,有研究通过引入启发式函数、贪婪算法和 B 样条曲线方法优化路径生成,显著提升了无人机的避障性能。此外,针对城市高密度飞行环境的需求,一种改进的 RRT*算法结合动态碰撞检测和虚拟障碍技术,通常适用于复杂场景的四维路径规划方法,有效增强了算法在动态环境中的适应性与鲁棒性。另有研究针对复杂城市环境下的三维路径规划问题,将 T-RRT 算法与 A*算法相结合,进一步优化了路径搜索效率。这些改进方案为路径规划领域提供了新的解决思路。
3.1.3 智能优化算法
智能优化算法因其在复杂组合优化问题中的优异表现,在路径规划领域得到了广泛应用,如遗传算法(Genetic Algorithm, GA)、蚁群算法(Ant Colony Optimization, ACO)和人工蜂群算法(Artificial Bee Colony Algorithm, ABC)。
遗传算法基于自然选择与遗传变异原理,通过种群迭代优化实现全局搜索。有研究提出了一种改进 GA 与 A*算法相结合的路径规划方法,以路径最短为主要优化目标,同时满足无人机的运动约束条件,从而有效提升了路径规划的精度和可靠性。
蚁群算法通过模拟蚂蚁觅食行为,利用信息素机制解决组合优化问题。改进的蚁群算法通过评估路径危险性和飞行距离,建立动态优先级机制,显著提升了最优路径的求解效率。在复杂环境下,研究者构建了环境威胁概率模型,采用协同多种群 ACO 算法[60]。为提升三维环境中的搜索效率,蚁群算法常与粒子群优化、差分进化等智能算法融合,在保证路径质量的同时显著提高收敛速度。
人工蜂群算法是一种模拟蜜蜂觅食行为的群体智能优化算法。为提高算法性能,有研究者对人工蜂群算法进行了多方面优化。此外,通过将开采次数作为信息交互因子,并结合余弦函数的动态特性,可引导算法实现更精确的局部搜索。
3.1.4 机器学习算法
神经网络算法通过模拟生物神经系统的连接机制,利用可调的权重和偏置实现复杂的数据建模与高效的任务处理,在路径规划领域展现出显著的应用潜力。相关研究表明,神经网络能够有效应对环境复杂性,提升路径规划的性能。利用神经网络对环境障碍进行统一建模,能够实现快速且精确的障碍探测。
强化学习(Reinforcement Learning, RL)通过与环境的交互反馈实现自主决策,因其不依赖环境先验知识的特性,在未知环境路径规划中具有显著优势。近年来,该领域研究取得重要进展,主要体现在以下创新方法:双层规划架构的提出,通过局部信息处理与全局信息优化的协同机制,显著提升了无碰撞路径的规划性能;基于导向强化 Q 学习的方法,利用信号强度设计回报函数实现高效导航,但在三维环境中仍面临计算复杂度问题;结合势函数优化的 DQN 方法,通过构建多角度动作空间解决无模型路径规划问题;改进的 option-DQN 算法,在数据采集效率方面展现出优越性能。
在全局路径规划领域,深度强化学习方法通过多种创新技术路径取得了显著进展。其中,融合贪婪策略与启发式搜索规则的 Dueling DDQN 算法有效优化了动作选择机制;结合人工势场的改进 DQN 算法(B-APFDQN)利用势场引导动作选择,大幅提升了收敛速度和规划效率;而集成 N步更新策略的 NP-MTDDQN 算法则通过优化经验回放机制,实现了复杂环境下的高效自主避障和最优路径规划。这些技术创新共同推动了强化学习在路径规划领域的深度应用。
针对特殊场景路径优化
低空飞行器在现代社会中的应用场景日益多样化,涵盖物流配送、应急救援等领域。然而,当前大多数无人机航迹规划算法研究仍聚焦于通用场景,针对特定应用场景进行优化和改进的文献相对较少。显然,不同应用场景具有独特的约束条件,例如空域限制、气象条件、任务优先级或能耗需求,这些约束的变化可能显著影响航迹规划算法的性能。因此,针对特定场景的约束条件,开发和优化定制化的航迹规划算法显得尤为必要。
在特定应用场景的无人机路径规划研究中,针对不同领域需求提出了多种优化算法。在电力巡检领域,结合网络分析法和遗传算法的路径规划方法能有效防范林火风险;针对城市巡防任务,改进的乌鸦搜索算法(LDCSA)融合 Levy 飞行和差分进化策略,显著提升了多无人机协同规划的搜索效率和覆盖性能;而在高层消防场景中,创新的 RRT 森林算法通过多树连接和动态规划优化,解决了传统方法在复杂环境中的效率低下问题。这些面向特定场景的算法优化,通过仿真验证在各自应用领域都展现出优越的性能表现。
针对城市和山区物流配送场景,研究者提出了多种创新的无人机路径规划方法。在城市空域领域,主要技术突破包括:(1)结合安全特性与强化学习的安全路径规划方法;(2)改进 A*人工势场算法,有效解决局部陷阱问题并优化导航成本;(3)基于 Voronoi 图、Dubins 路径和 Floyd 算法的综合方法,通过考虑空气密度和建筑影响显著降低能耗。在山区物流场景中,融合多目标优化与改进萤火虫算法(IFA)的方案表现出色,通过引入灰狼优化策略增强了全局搜索能力,在时效性农产品运输方面展现出独特优势。这些研究为不同地形条件下的无人机物流配送提供了安全高效的路径规划解决方案。
卡车-低空载具协同路径优化
3.3.1 单模式低空载具-卡车协同路径优化
在物流运输协同路径优化研究中,针对单模态低空载具与卡车的协同场景,相关研究并非简单套用传统道路交通领域的路径优化方法,而是结合低空载具的飞行特性与场景需求进行了方法创新,形成了区别于地面交通优化的独特技术路径。
在卡车-无人机协同配送领域,针对不同地形特点提出了多种创新路径规划方法。针对农村陡坡地形,采用 K-means 聚类与贪心算法相结合的方法,通过引入地形坡度约束改进聚类分析,并在路径优化中综合考虑距离成本、无人机续航及地形能耗等因素,有效解决了复杂地形下的配送难题。在城市配送场景中,基于改进遗传算法的协同优化模型以时间和成本为双目标,实证显示其配送效率较传统方式提升 20%以上。此外,借鉴机场 shuttle 网络安全管理经验的方法,在保障飞行安全间隔的同时优化路径效率,为城市低空物流提供了重要参考。这些研究充分体现了单模态卡车-无人机系统在优势互补方面的巨大潜力。
相较于无人机,eVTOL 作为另一种单模态运输工具,在 eVTOL 与卡车协同运输研究领域,主要聚焦于城市空中交通体系的构建与优化。相关研究通过离散选择模型系统评估不同运输需求,建立了基于 eVTOL 续航和载重特性的分层规划方法,有效确定了最佳接驳节点。针对 eVTOL 的续航限制,采用时空网络流算法优化多车协同回收及充电路径。同时,通过考虑环境因素和优化飞行轨迹,确保与地面运输的时空匹配精度。这些研究为构建高效衔接的城市空中与地面协同运输系统提供了关键技术支撑。
3.3.2 多模式低空载具-卡车协同路径优化
随着物流运输场景复杂性提升,单一运输工具已难以满足多样化需求,多模态低空飞行器与卡车的协同路径优化成为研究热点。学者们通过整合不同设备的性能优势,构建协同模型并优化路径规划,有效提升了运输效率与资源利用率。
在无人机与 eVTOL 协同卡车的路径优化方面,研究者们着力于发挥异构设备组合的协同效应。研究提出的分层优化框架有效解决了大规模订单配送问题:在任务分配层面,根据卡车、无人机和eVTOL 的不同特性进行精准匹配,实验证实该模式较传统单一运输方式效率提升超过 40%。此外,自适应大邻域搜索算法被证明能有效处理多设备协同中的任务分配与路径冲突问题,支持运输策略的动态优化调整。
除无人机与 eVTOL 的组合外,直升机与无人机协同卡车的路径优化在应急物流领域展现出独特价值。有研究针对灾后道路损毁场景,构建直升机-卡车-无人机三元协同模型,设计分层运输策略,并采用禁忌搜索与贪心插入结合的两阶段启发式算法,先优化直升机与卡车主干路线,再动态规划无人机配送任务,结果表明,在道路损毁率超 40%的极端环境下,物资配送效率较单一运输方式提升 35%。同时,模型充分考虑无人机续航短(通常 30 分钟、3km 航程)的限制,通过滚动时域更新需求,实时调整协同策略以保障物资按时送达。这些研究表明,多模态运输工具的协同不仅能够整合优势互补的运输能力,更能在复杂场景中实现高效、可靠的物资流通。
未来路径规划与协同优化研究应进一步强化场景化方法创新:针对载人场景(如 eVTOL 接驳)需重点优化 “乘客等待时间 + 空中舒适度”,路径算法应纳入噪音污染约束;针对巡检场景(如电网无人机巡检)则需聚焦 “覆盖完整性 + 设备续航匹配”,开发融合地形三维建模的路径规划方法,形成与物流场景差异化的技术体系,通过跨学科技术整合(如机器学习、时空网络流、传感器融合)与实际场景验证,开发更高效、鲁棒且实用的路径规划算法,满足城市空中交通、应急物流及复杂环境下的多样化需求。
运营层
与关注长期基础设施投资的战略层面和中期资源分配的战术层面不同,运营层负责低空飞行器在运行阶段的即时规划与调度,包括在动态环境中对任务和路径进行实时决策,以及多主体之间的协同工作。相比于道路交通运营,低空飞行器在三维空间中存在更加复杂和突发的因素,如天气条件的变化等问题,都增加了飞行器在运营层相关问题中寻找最优解决方案的复杂性。因此,低空飞行器的运营层核心挑战在于应对显著的动态性和随机性,必须实时调整计划以保证任务有效执行,这就要求运营层决策必须在极短的时间内做出,不仅对算法的计算效率具有很高的要求,更需要算法具备在不确定环境中做出可靠决策的鲁棒性。在低空经济背景下,运营层优化方法通常围绕实时路线规划和多交通主体协同机制两个方面展开,既要优化单架或多架无人机的实时路径决策,又要保障无人机群与外部系统的协同运作。
实时路线规划
实时路线规划是确保低空飞行器安全、高效完成点对点飞行任务的基础。与道路交通中车辆为规避拥堵而进行的二维路径重规划不同,低空飞行器的实时规划面临着更为严峻和复杂的挑战。当出现突发情况时,系统必须对无人机路径重新规划以保证整体任务的顺利完成。路径实时规划规划的目标是在最小化延误和成本的同时,及时更新无人机航线,避开新的障碍或满足新的任务要求。
尽管低空飞行器实时规划问题比较复杂,但通常可以被构建为一个数学优化问题:即在满足一系列由物理定律和任务定义的约束条件下,最小化根据不同的任务需求或决策者偏好构建相应的成本函数。研究者通过对经典方法的改进,取得了有效的进展,主要包括:(1)障碍惩罚函数法,将三维飞行状态和控制约束转化为成本函数的一部分,通过优化复合成本函数实现稳定控制;(2)多目标加权优化方法,综合考虑路径长度、地面风险、着陆点可达性和能耗等关键因素,构建可自适应调整的模块化规划系统。这些改进有效提升了算法在复杂环境中的适应性和规划效率。
通过构造成本函数,能够定义一条好的路径,而实时规划算法的目标则是在严苛的时间限制下,尽可能地去逼近好的路径。有研究通过改进 MCTS 算法,在限制搜索深度的同时引入跳跃点搜索算法的离散路径点引导机制,有效平衡了无人机路径规划的速度与精度。这些实时规划算法主要可以划分为增量式算法,基于学习的瞬时推理等。
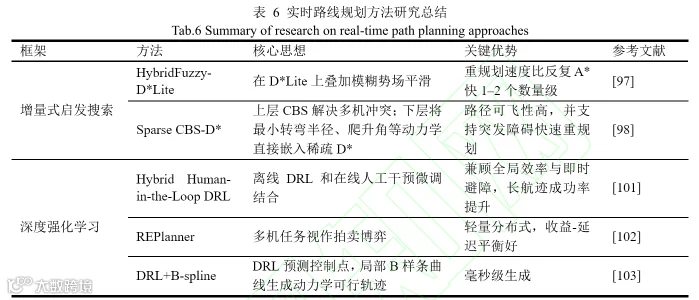
增量式启发搜索算法通过重用历史规划信息并局部修复受影响路径,显著提升了动态环境下的规划效率。典型代表 D*算法采用反向搜索机制,当检测到环境变化时能快速更新节点代价值并重新生成最优路径。已有实验表明,在动态环境中,其重规划速度比反复调用 A*算法快一到两个数量级。为适应无人机三维复杂环境的应用需求,研究者提出了多种改进方案:稀疏 CBS-D*算法通过集成动力学约束增强路径可飞性;引入启发点引导的扩展方法有效解决了方向约束问题;而结合碰撞因子的改进版本则显著提升了室内避障能力。这些优化使算法在动态复杂环境中展现出更强的适应性。
此外基于学习的方法与显式地重新计算一条路径不同,能够训练一个直接从环境状态映射到控制动作的策略。Zhang 等提出的 Hybrid Human-in-the-Loop DRL 框架将人类实时干预融入深度策略训练,使无人机在长航迹中面对不可预测障碍时既能保持全局航向,又能即时避障;Khalil的REPlanner 把多智能体轨迹规划建模为经济博弈,通过拍卖机制与分布式强化学习让无人机动态分配任务,兼顾计算轻量、路径收益与系统弹性;Hasanzade 等提出的动态可行快速重规划策略利用深度强化学习预测控制点并结合 B-spline 轨迹,使高速无人机在拥挤环境中以毫秒级频率生成满足动力学约束的安全航迹。综合来看,深度强化学显著提高了无人机在突发障碍、能耗约束与多机协同场景下的实时重规划效率与鲁棒性。表 6 总结了低空飞行器实时路线规划方法的核心思想和关键优势。
然而,算法的选择与环境动态性的本质之间存在着深刻的内在联系,并不存在一个适用于所有场景的算法。如果环境变化是离散且可明确感知的,D*这样的增量式搜索算法就极为高效;相反,如果环境是高度随机且部分可观测的,那么像强化学习这样的无模型方法可能更具鲁棒性。RL 策略直接学习对局部观测的反应,无需构建一个完整的、实时更新的全局世界模型,因此更适合在混乱和不确定的环境中导航。
多交通主体协同机制
运营层不仅需要实时优化路径,还需与外部环境和管制系统协同以确保飞行安全和合规。与道路交通不同,传统车辆协同主要依赖基础设施间接实现:红绿灯分配通行权,交通标志规范行为准则,通过车道线和让行规则实现隐式协同。近年来,车联网(IOV)等新兴技术正推动更智能的交通控制方式发展,为缓解拥堵和提升联网车辆协同效率提供了新思路。该技术提高了公众的安全性和可靠性,同时保护用户免受事故侵害,对智慧城市起到显著作用。
与 IOV 类似,在低空飞行器系统的协同机制中,其中一个重要的概念是 UTM 系统。UTM 通过提供一系列服务,将无人机运营商、无人机本身、传统航空以及空管服务提供商连接起来,形成一个协同决策的网络。
UTM 的数据源包括:无人机通过 ADS-B 等技术广播的自身位置和意图、气象服务提供的实时和预测天气信息、雷达等监视系统的数据,以及传统载人飞机的飞行动态等。基于此,UTM 系统能够根据实时事件动态地划设和广播临时禁飞区,来防止飞机与其他飞机碰撞和障碍物,并保持交通的有序流动。
近年来,针对无人机的安全高效运行,研究人员从不同层面提出了多种先进的协同与控制算法。在宏观交通管理层面,有研究开发了一种基于混合人工智能的 4D 航迹管理系统,该系统利用禁忌搜索等元启发式算法实现需求与容量的动态平衡,并通过机器学习进行自适应调整,从而从全局角度预防交通拥堵和潜在冲突。在微观战术执行层面,为解决实时间隔保证与冲突消解问题,有学者提出了一种在线协调框架,该框架采用行为树实现去中心化机动决策,并结合基于优化的后退水平面方法生成精确规避轨迹。此外,为了进一步针对航线交叉口这一关键冲突场景,通过将后退水平面控制与共享调度协议相结合,实现了复杂节点处的高效有序防撞。这些研究共同构建了从宏观战略规划到微观战术执行的多层次无人机交通协同与安全保障体系。
综上,低空交通的协同机制是一个涵盖了空域结构设计、全局流量控制和局部冲突解脱的多层次、高智能化的体系,其复杂性和对算法的要求,均显著超越了现有的道路交通领域。
低空飞行器调度
在低空经济的动态应用场景中,无人机任务需要即时决策是否受理新任务以及如何指派。低空经济场景中,配送任务请求具有高度的实时性,因此调度系统必须即时决定是否受理任务并指派无人机执行。与道路运输相比,无人机在任务调度过程中面临更多约束条件,包括续航、性能和通信能力等。针对低空经济的物流、载人和巡检等方面的应用,研究者提出了多种任务受理与调度方法。
4.3.1 物流无人机任务调度优化
现有研究提出了多种任务受理决策方法来提高任务响应效率和资源利用率。首先,规则驱动算依据预先设定的规则或阈值来决定是否接受任务。例如,有研究利用启发式规则将复杂的多无人机、多任务分配问题转化为基于优先级的排序和选择问题,从而快速生成可行的任务分配方案。这类方法实现简单、计算效率高,但由于依赖固定规则进行决策,往往难以实现全局效益的最优。
其次,启发式算法将任务受理视为任务和无人机之间的匹配或拍卖问题,通过启发式算法或优化模型实现高效分配。相比固定规则,启发式匹配方法较规则法考虑了任务和无人机属性的匹配度,通常能提高资源利用率。有研究基于市场拍卖的框架,对包含时间窗的包裹配送任务和保障服务持续性的电池充电任务进行统一调度。
最后,动态调度算法被用于不断调整无人机任务计划,从而应对任务到达的实时性和环境的不确定性,如滚动时域算法会在每个决策时隙对未来一段时间的任务进行重新规划,以滚动优化方式插入新任务、调整航迹,两阶段鲁优化模型在任务规划中引入不确定参数,通过先确定初始任务分配方案、再根据实时信息进行调整,以提高计划对突发变化的适应性。这些动态调度方法提高了计划对突发任务和随机因素的适应性。在实际系统中,将多种策略结合使用能够较好的兼顾决策速度和调度质量。
4.3.2 载人无人机任务调度优化
载人无人机调度在继承地面调度优化目标的同时,引入电池管理和空域调配等问题。有研究基于路径生成的启发式算法,通过引入多种基于规则的终止策略在保证求解质量的前提下显著提升计算效率,实现机队整体吞吐量最大化。另外,针对垂直起降场的高密度运行需求,有研究采用智能排序算法优化起降序列,在确保安全间隔的同时最大化航班服务效率。这些方法有效解决了载人无人机调度中的核心难题。
4.3.3 巡检无人机任务调度优化
无人机同样能够用于巡逻监测基础设施及环境监测任务等巡检任务,该场景下的无人机调度问题通常表现为覆盖特定巡检点或区域的路径优化,并需考虑任务频率和持续监控需求。与地面巡检车辆不同,无人机调度需考虑禁飞区,并定期返回站点进行充电。针对上述特点, 有研究提出了混合整数线性规划模型,用于同时优化无人机-巡检任务的分配、巡检点访问顺序以及中途充电决策,并基于元启发式算法来高效求解。大量算例实验表明该算法可扩展至大规模实例并保持优质解答。其次,在巡检路径规划领域,遗传算法也得到应用。研究表明,相比贪心或爬山算法,遗传算法在仿真中显著降低了总航程和能耗,分别降低约 22%和 23%,并在任务均衡度等指标上至少提升 13%,证明了全局随机搜索对于复杂巡检路径优化的有效性。除此之外,轻量化 YOLOv5-Mv3 算法通过优化特征提取网络来实现电网巡检的实时检测[120],提升巡检响应效率。
结语
本文系统综述了低空飞行器运行优化方法的研究进展,覆盖战略层的设施选址与航路网络设计优化、战术层的路径优化与空地协同路径优化、运营层的实时路线规划与多交通主体协同,归纳了混合整数规划、启发式算法、强化学习等核心方法在多目标优化与复杂约束处理中的应用。研究表明,优化方法在提升低空经济运行效率、安全性及资源利用率方面发挥了关键作用,已在城市空中交通、无人机物流、应急救援等场景中取得初步验证,为构建高效、安全、绿色的低空经济体系提供了技术支撑。这些成果不仅推动了低空经济的规模化落地,还为高端制造、信息通信等产业链升级注入了新动能,具有显著的经济社会价值。在相关优化问题的优化方法研究方面,已取得显著进展,但依然存在较大的发展空间。
战略层现状与未来研究前景
聚焦设施选址与低空航路网络优化,为低空经济提供基础设施支撑。设施选址优化从传统多韦伯问题拓展至无人机物流中心及起降点选址,综合考虑成本、效率、续航及噪音等约束,采用重心法、蚁群算法、NSGA-II、改进 PSO 等方法,构建多目标优化模型,显著提升配送效率与应急响应能力。航路网络优化通过分层架构(如 LAPARN)、AirMatrix 等设计,结合改进蚁群算法、A*算法及 DRL,优化路径安全性与效率,降低节点数量与运营成本。
未来战略层优化可重点突破以下方向:
(1)多模态低空交通网络协同优化:研究低空飞行器(无人机、eVTOL)与地面交通(卡车、高铁)、水上交通(船舶)的协同优化,构建“空-地-水”一体化物流网络,提高整体运输效率。
(2)动态空域资源分配:构建低空空域的数字孪生系统,结合 5G-A/6G 通信、北斗导航和 AI技术,实现空域资源的动态优化与冲突预测。
(3)社会与环境可持续性:量化噪音、碳排放等外部成本,优化选址与航路设计以提升公众接受度,探索绿色能源(氢能、无线充电)对基础设施布局的影响。
战术层现状与未来研究前景
战术层研究围绕低空经济核心需求,聚焦低空飞行器路径优化与卡车-低空载具协同优化。路径优化通过改进差分进化、动态 A*及 Parallel-A*算法,结合网格划分与强化学习,攻克城市复杂环境与高风险场景的规划难题,提升安全与效率。协同优化分为单模式与多模式:单模式无人机/eVTOL与卡车协同利用 K-means、遗传算法等优化配送路径,效率提升 20%-40%;多模式异构机群通过分层优化与时空网络流算法,整合直升机、无人机、eVTOL 优势,显著提升复杂场景(如应急物流)的运输效率。
未来战术层优化可重点突破以下方向:
(1)算法融合创新:深度整合机器学习(如深度强化学习、图神经网络)、时空网络流理论、多智能体博弈论等前沿方法,开发混合算法架构,实现精确数学建模与数据驱动方法的优势互补。
(2)计算效能突破:开发基于场景特征的预处理与降维技术。
(3)仿真验证:将更注重仿真方法模块,通过多样化仿真方案聚焦不同的应用场景。
运营层现状与未来研究前景
运营层的核心挑战在于应对显著的动态性和随机性,必须实时调整计划以保证任务有效执行,这就要求运营层决策必须在极短的时间内做出。为应对这些挑战,实施路径规划呈现出显著的混合化与分层化趋势,通过融合不同算法优势,将复杂问题分成多个问题以实现高效可靠的实时运营决策。此外,针对无人机的多交通主体协同管理,通过引入多层结构的 UTM,并引入多种协同与控制算法保障无人机交通安全。
未来运营层优化可重点突破以下方向:
(1)算法的实时重规划效率:研究城市峡谷、密集建筑群等复杂环境下的实时路径规划,结合LiDAR、计算机视觉与强化学习提升避障能力。
(2)异构机群协同优化:针对多模式低空载具(如无人机、eVTOL、直升机)协同,研究基于分布式强化学习和博弈论的动态任务分配算法,解决异构机群在高动态场景下的协同效率问题,特别是在应急救援和城市物流中的实时调度。
(3)应急响应优化:结合随机优化与鲁棒控制理论,优化灾害救援、医疗急救等高风险场景下的飞行路径与资源调度。
(4)数字孪生应用:探索数字孪生技术在航路动态监控与管制中的应用,构建实时仿真与优化体系。
|
欢迎行业内的企业、技术专家和科研机构、上下游企业加入进行深入交流, 共同探讨低空飞行器产业的未来发展方向。 
|