
Optimus (Tesla Bot)
2022
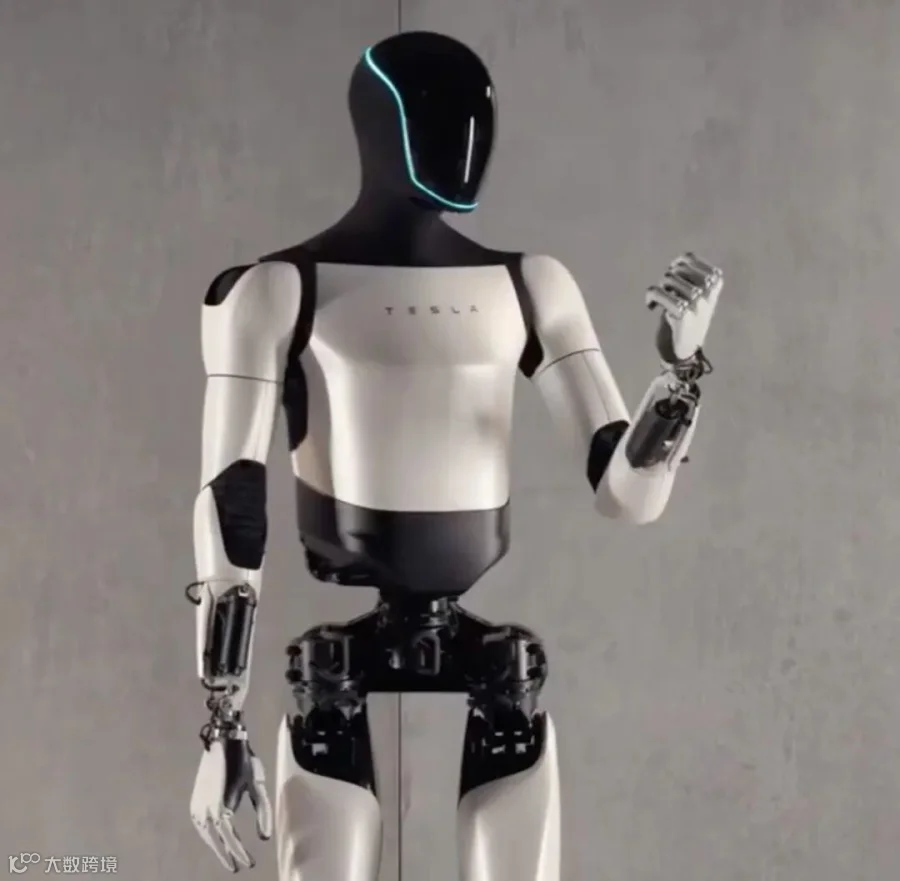
Optimus 是一款通用机器人助手,旨在执行重复性、危险性或人类不愿执行的任务。搭载先进的人工智能技术,可以自主行走、爬楼梯、举起和搬运物体,以及操控物品。特斯拉在 2025 年 Q1 对外称弗里蒙特工厂的试生产线“按计划推进”,并曾表示最快在 2025/2026 年尝试对外销售。马斯克在2024年的一次活动上谈到擎天柱时说道。“我们为汽车开发的一切——电池、电力电子设备、先进的电机、变速箱、软件、人工智能推理计算机——实际上都适用于人形机器人。”
Optimus 采用与特斯拉自动驾驶汽车类似的先进人工智能系统。能够自主导航、规划路径并避开障碍物。先进的控制算法可实现物体的精确操控。专为安全的人机交互而设计。人工智能系统能够学习和适应,并随着时间的推移不断提升性能。

Optimus 主要采用白色、黑色与灰色的组合,类似人类肌肉—骨骼的层次关系。白色用于主体外壳,传递干净、未来感;黑色用于关节、手掌等活动部位,突出机械结构与运动逻辑。
材料:轻量化复合材料、PEEF、镁合金、铝合金等
Figure 01
2023
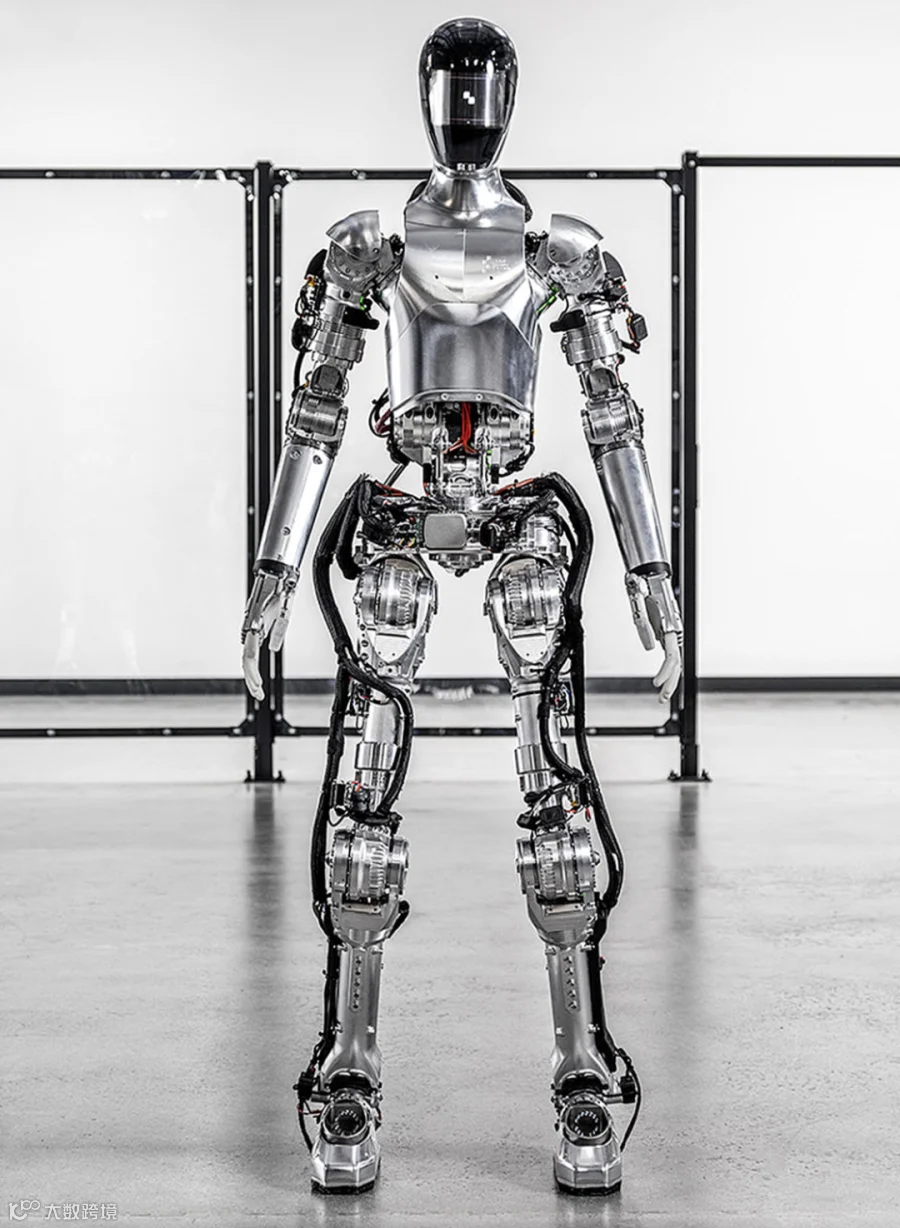
通用型机器人劳动力,能够与其环境交互,并安全地与人类并肩工作。它能够利用人工智能学习新任务,并通过类人的操作技能执行有用的工作。2023 年 3 月,Figure 宣布将研发一款具有商业可行性的通用人形机器人,名为 Figure 01。到 2023 年 10 月,公司开始展示自主任务,包括动态行走、制作咖啡以及在工厂环境中搬运箱子。2024 年 2 月,Figure 宣布完成 6.75 亿美元的 B 轮融资,公司估值达到 26 亿美元。

Figure 尺寸大致与人类相同。可举起 20 公斤的负载。利用机器学习在复杂且非结构化的现实环境中执行任务。
规格
身高168 厘米;体重 60 公斤;速度4.3 公里/小时。
材料:铝
Atlas
2024
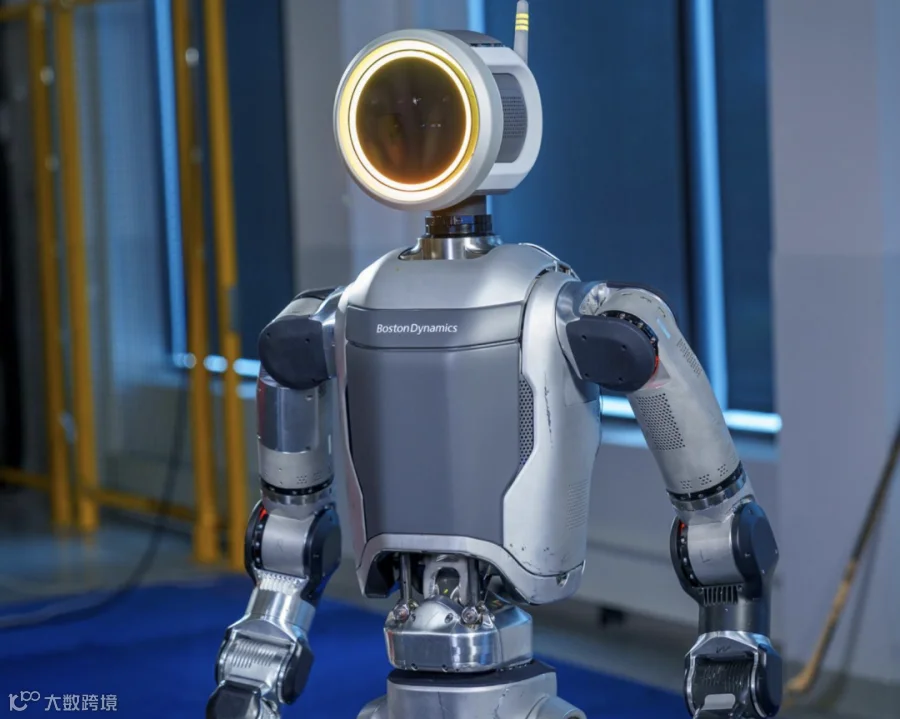
全电动人形机器人。与前几代不同,这一版本不再依赖液压驱动器,更轻、更紧凑,同时更强壮、更灵活。它能够完成动态动作,可以以超越人类能力的方式移动和弯曲身体。作为第五代 Atlas 人形机器人,相比前几代更强大,动作范围更广。可配备多种夹持器,以满足客户环境中的不同操作需求。配备关节式头部并集成 LED 灯。
灵感来自皮克斯的头部

与 2013 年首次亮相的原始 Atlas,以及 2016 年推出的后续型号 HD Atlas(液压版 Atlas)不同,全新的 Atlas 完全由电力驱动,不再依赖液压执行器。
波士顿动力的 Atlas 项目主要专注于研究和演示。但公司表示,最新的 Atlas 是为现实应用而设计的,将其定位为一款产品,目标是工业和物流领域。
公司还表示,2020 年收购波士顿动力的现代汽车集团正在建设“新一代汽车制造能力”,而这一环境将成为“新 Atlas 应用的理想测试场”。

历年来的 Atlas。照片来源:Boston Dynamics
轻量化材料:Atlas 使用钛合金和铝合金的 3D 打印部件。
Unitree H1
2023
2023 年,Unitree 首次进军人形机器人领域,推出了 H1 —— 一款全尺寸通用型双足机器人。H1 高约 1.8 米,重约 47 公斤,配备高扭矩驱动器,关节扭矩可达 360 牛米。其机械设计在强度和轻量化之间取得平衡,使其能够实现快速而稳定的双足运动。H1 集成了模块化驱动系统,搭载深度相机与激光雷达的感知系统,以及由 AI 驱动的控制栈,用于平衡、步态生成和在室内外环境中的运动。H1 已公开展示了动态任务,如行走、奔跑以及实时适应地形。

宽22 厘米;高180 厘米;长57 厘米;重47 公斤。
超轻量化设计。
材料:碳纤维、铝
Unitree G1
2024
一款紧凑型人形机器人,专为 AI 驱动的移动与操作而设计。亮点在于灵活的机动性、具备力控的灵巧双手,以及执行后空翻和精细物体操作等任务的能力。

G1 拥有非凡的灵活性。照片来源:Unitree Robotics
G1 人形机器人采用了 Unitree 的定制驱动技术,并利用了与其四足机器人相似的高扭矩关节模块。早期展示的视频中,G1 完成了包括后空翻在内的动态运动任务,以及精细的物体操作,突显了其机械灵活性和软件定义的控制能力。G1 代表了高性能机电一体化与具身 AI 在相对紧凑形态中的融合。该机器人在设计上注重可扩展性与模块化控制,具备多轴柔顺控制、基于逆运动学的运动规划,以及实时平衡修正。其相对较轻的重量和自包含的驱动器,使其对学术实验室和机器人开发者具有吸引力,适合用于研究、远程操控和 AI 驱动的机器人任务中,探索通用型人形机器人。
宽45 厘米;高130 厘米;长20 厘米;重35 公斤。
材料:轻量化高强度铝合金与碳纤维部件。工业级交叉滚子轴承。
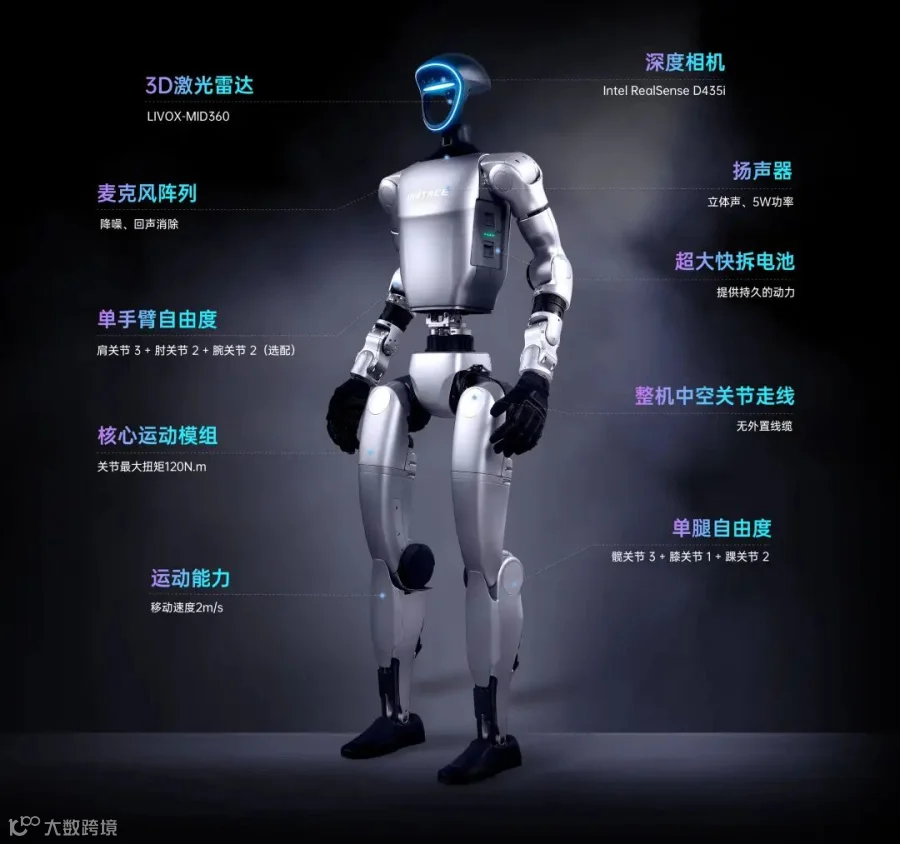
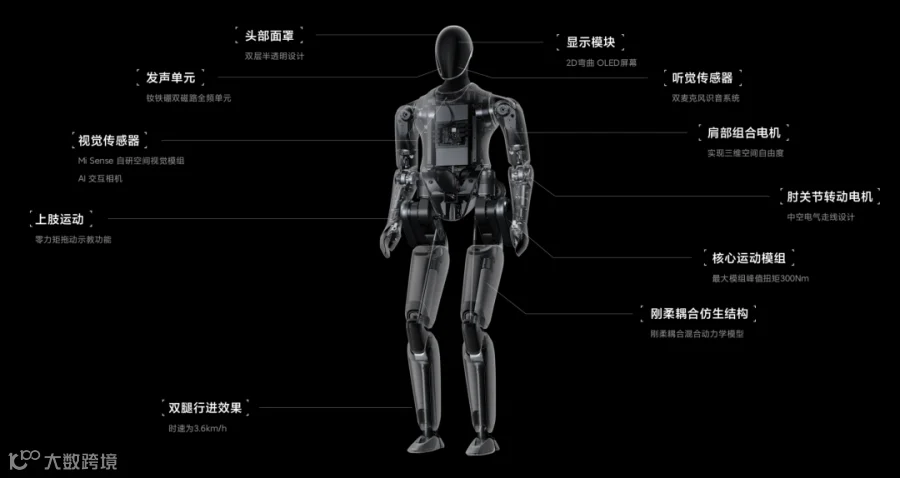
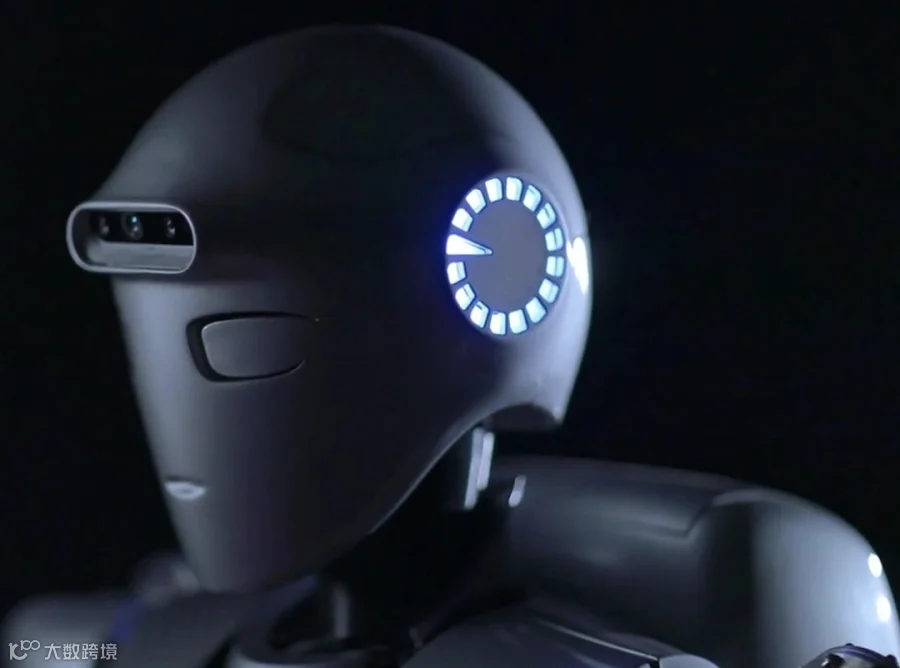
CyberOne
2022
为通用且高性能的平台,用于工业应用和科研。它能够行走、感知并在有人类活动的环境中导航,还能执行物体操作等任务。CyberOne 配备了高功率密度驱动器。据公司介绍,每个上肢驱动器重量仅 500 克,额定输出扭矩可达 30 Nm。这些定制电机使人形机器人能够在崎岖地形上行走并保持平衡。该机器人还可以识别人脸、辨别人类情绪,并构建环境的 3D 地图。小米机器人实验室将继续为该机器人研究和开发新的功能。

仿人化设计。高功率密度驱动器支持动态行走。具备安全的人机交互能力。能够在有人类的环境中导航。两种速度:步行 3.6 公里/小时;奔跑 7.2 公里/小时。
身177 厘米;体52 公斤;
材料:碳纤维、铝、ABS、硅胶
HRP-4
2010
为能够与人类协作,并能展现出极为自然、接近人类的动作。
研发方:川田工业(Kawada Industries)与日本产业技术综合研究所(AIST)

HRP-4 延续了 2002 年的 HRP-2 和 2006 年的 HRP-3 的发展。
在这个项目中,川田工业的工程师专注于人形机器人的硬件部分,而 AIST 的研究人员(包括人形机器人研究组组长横井一仁,以及高级研究员金広文夫)负责开发运动控制软件。研发目标是让新一代人形机器人比前几代更轻(从而在人机交互中更安全),同时在物体操作和人类环境导航方面具备更强的能力。最终设计于 2010 年 9 月正式发布。

一个巧妙的设计是它能够伸手够到自己的背包。照片来源:川田工业 / AIST
材料:塑料外壳、铝合金框架。
Stuntronics
2018
仿生特技替身机器人。结合了先进的机器人技术与对无线动态运动的探索,能够以可重复且精确的方式完成空中翻转、扭转和造型动作。
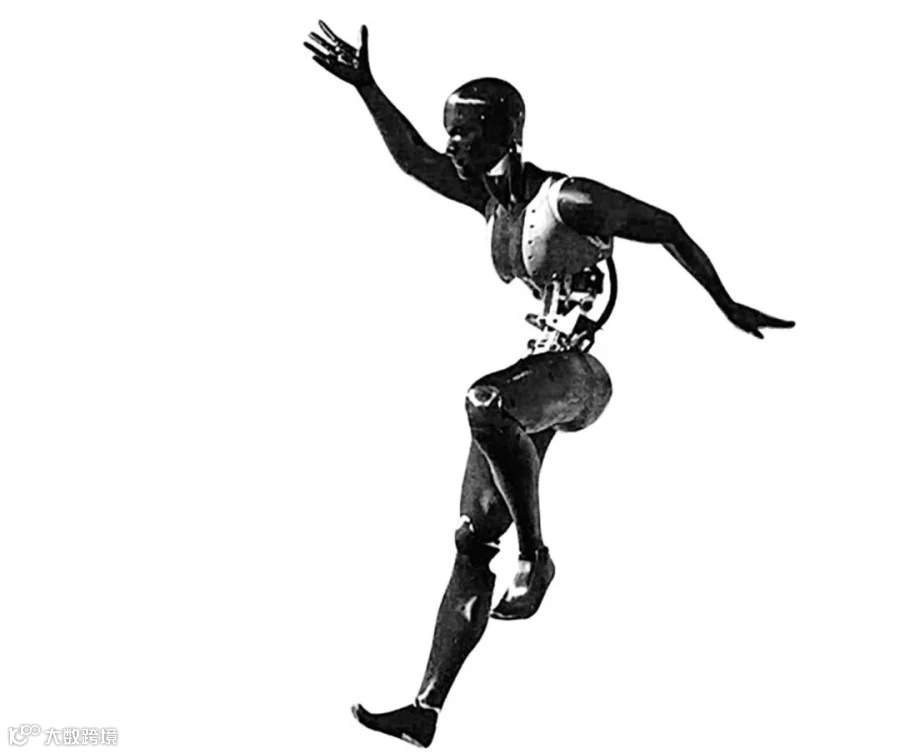
Stuntronics 能够完成多种杂技动作。照片来源:Walt Disney Imagineering
机载传感器包括惯性测量单元(IMU),用于追踪翻转动作,并在着陆前的合适时机收拢身体。该机器人能够承受与跳跃和空中飞行相关的高加速度和减速度,并能够完成多组杂技动作。
材料:铝,各类 3D 打印塑料
Valkyrie
2013
Valkyrie 是一款先进的人形机器人,旨在在人类建造的受损或恶劣环境中运行。NASA 希望最终将 Valkyrie 送入太空、月球以及火星。

Valkyrie 由 NASA 约翰逊航天中心(JSC)研发,该中心在人形机器人开发方面有着悠久历史,其中最著名的是 Robonaut 项目。项目负责人 Nicolaus Radford 领导了来自德克萨斯州休斯敦的 NASA JSC 工程师团队,他们在严格保密和仅九个月的紧迫期限内,与德克萨斯大学和德州农工大学合作,设计并建造了 Valkyrie。
Valkyrie 在 NASA 内部的正式代号为 “R5”,其研发目标是参加 DARPA 机器人挑战赛选拔赛。2016 年,NASA 将 Valkyrie 机器人分配给美国和欧洲的三家机器人实验室,以探索和开发其能力:麻省理工学院(MIT)、马萨诸塞大学洛厄尔分校(与波士顿东北大学合作)、以及苏格兰的爱丁堡大学。

电力驱动。可更换电池。手臂和腿部采用串联弹性旋转驱动器。外覆柔性织物。以北欧神话中的女性人物命名。研发与制造周期为 9 个月。
身高190 厘米;体重125 公斤。
材料:外覆发泡材料与柔性织物
Nao
2008
Nao 是一款小型人形机器人,专为与人类互动而设计。集成了丰富的传感器(以及个性),能够行走、跳舞、说话,并识别人脸和物体。如今已发展到第六代,被广泛应用于全球的科研、教育和医疗领域。
研发方:软银机器人(SoftBank Robotics)(最初由 Aldebaran Robotics 开发,2015 年被软银收购)
自2008 年公司推出了 Nao 机器人,这一平台被国际广泛采用,如今在全球 600 多所大学、实验室和学校的教育与科研中得到应用。Maisonnier 的愿景是让能够帮助人类的机器人伙伴不再只是科幻,而是为老龄化社会需求提供现实解决方案。Aldebaran 致力于在人形机器人领域进行探索,涉及自闭症儿童治疗、人机交互和个人机器人等方向。

最新型号:Nao6。照片来源:软银机器人(SoftBank Robotics)

完全可编程平台。能够追踪物体并识别语音。配备跌倒管理功能(检测跌倒并触发保护)和跌倒恢复功能(可自行站起)。语音识别与对话功能支持 20 种语言,包括英语、法语、西班牙语、德语、意大利语、阿拉伯语、荷兰语、葡萄牙语、捷克语、芬兰语、俄语、瑞典语和土耳其语。

宽31.1 厘米;高58 厘米;长27.5 厘米;重5.5 公斤。
材料:聚碳酸酯-ABS 塑料、聚酰胺、碳纤维增强热塑性塑料。
Surena 4
2019
Surena 4 是一个人形机器人平台,旨在研究双足运动、操作和人工智能。作为该系列人形机器人中的最新一代,它能够在不平坦的地形上行走,并通过力控抓取物体,包括用笔书写自己的名字。它还被用于特殊活动中的表演娱乐,以及吸引学生投身工程领域。
研发方:德黑兰大学
Surena 4 思索着生命、宇宙以及一切。照片来源:德黑兰大学先进车辆中心
2008 年,德黑兰大学的研究人员推出了一款初级人形机器人 Surena,仅具备 8 个自由度(DoF)。不久之后,改进型 Surena 2 发布,拥有 22 个自由度并具备行走能力;2015 年,又发布了性能更强的 Surena 3,拥有 31 个自由度。2019 年底,伊朗的机器人专家发布了 Surena 4。这款新机器人拥有 43 个自由度,相较以往设计有了重大提升。
Surena 4 更轻、更紧凑、更灵活。它能够模仿人类的全身姿势,抓取水瓶,并在白板上写下自己的名字。约 50 名工程师和研究人员在德黑兰大学先进系统与技术中心(CAST)参与了该机器人的研发。在机械工程教授 Aghil Yousefi-Koma 的带领下,团队耗时近四年完成了 Surena 4 的研发工作。

即使踩到香蕉皮也没事。照片来源:德黑兰大学先进车辆中心
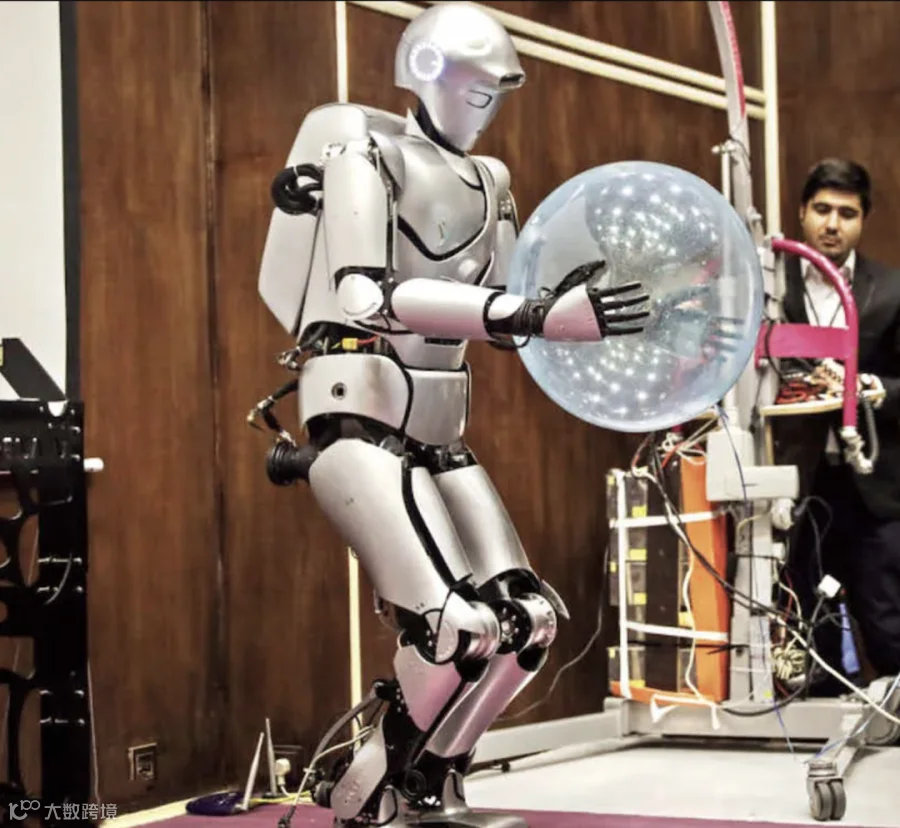
能够在不平坦地形上行走,具备抗推恢复能力,可操作物体并进行力控抓取。具有人脸与物体的检测与跟随、全身动作生成的行为模仿,以及语音识别与合成功能。
宽55 厘米;高170 厘米;长35 厘米;重68 公斤;
核心结构:AZ91 镁合金、铝、碳纤维;3D 打印外壳。
傅立叶
傅利叶GRx系列
是傅利叶智能推出的通用人形机器人平台,兼顾科研、商业与服务场景。该系列以“产品六边形”为理念,从运动智能、认知智能、灵巧作业、仿生设计、用户体验和商业应用六个维度迭代优化。
主要型号包括 GR-1、GR-2、GR-3:
GR-1 为首代量产人形机器人,用于科研和基础应用;
GR-2 身高约 175cm,体重 63kg,具 53 自由度,单手可负载 3kg,续航约 2 小时,并采用内走线、模块化和灵巧手升级,更适合复杂任务;
GR-3 更强调交互与陪伴,注重外观亲和和情感交流,适用于康复、教育、公共空间服务。
GR-2搭载新一代12自由度灵巧手,可以对不同形状、材质的物体实行精准抓握。同时支持多种示教方式,采集更多真实训练数据,弥补仿真与现实的差距。

作为GRx系列第三代智能人形机器人,GR-3以“功能之上,有爱如初”为核心,通过柔肤软包覆材设计与全感交互系统,重新定义了人机交互边界,让 “有温度的科技陪伴”从概念逐渐走向现实。

超越传统的金属感硬件设计框架,GR-3突破性地采用莫兰迪暖调配色、超跑级内饰包覆材料和安全环保的“固特棉GFOAM”软包内里,为使用者带来柔和亲近的视觉与触觉体验。
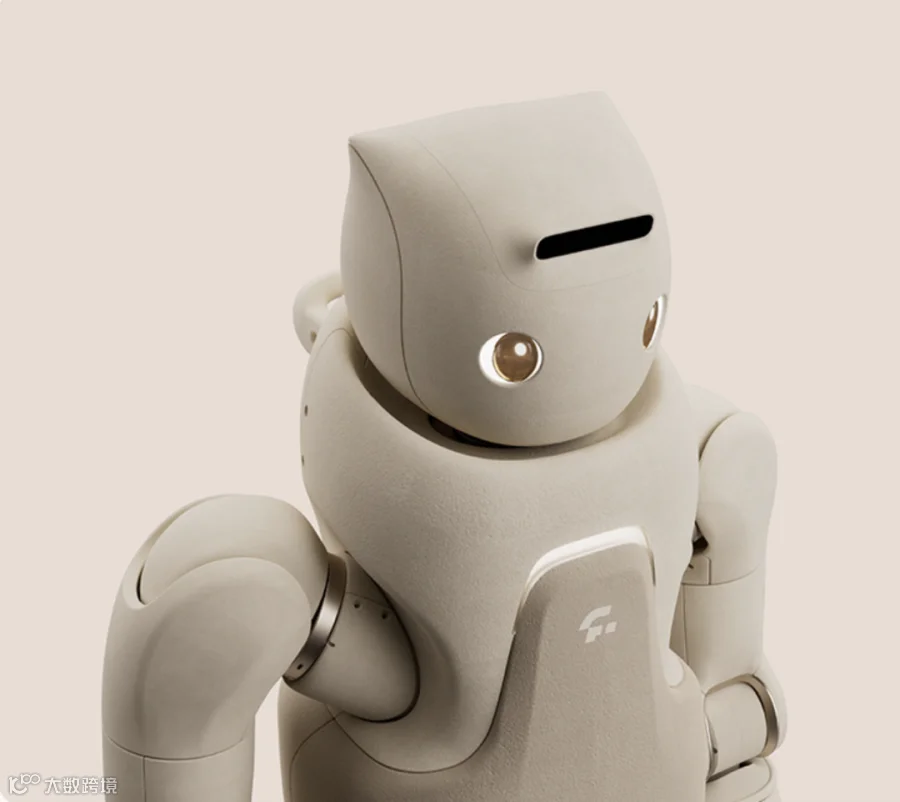
在本体结构上,GR-3身高165cm,体重71kg,全身配备多达55个自由度,可支持更拟人化的肢体表达。通过优化头部空间与轴心位置,实现了更紧凑灵巧的结构设计。同时,依托模块化设计,GR-3高效集成各类传感与运算模块,在保证美观性的同时兼顾实用性与拓展性,为更多场景的人机交互提供基础。
GR-3搭载傅利叶自研的全感交互系统,集成听觉、视觉、触觉三大模块:头部共配备4个麦克风阵列;内置的结构光+RGB广角镜头的摄像头模组;头部与躯干共分布了31个触觉传感器阵列,可实时感知触摸并作出反馈。
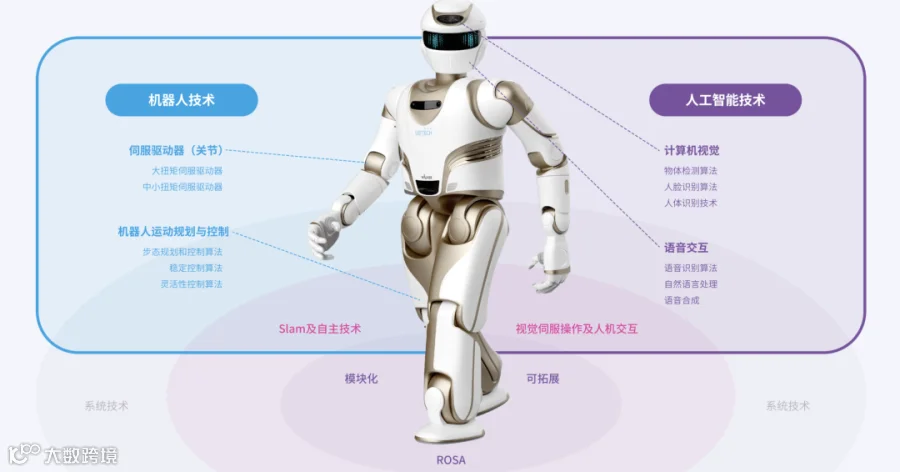
优必选 UBTECH|Walker S / S1
工业/通用人形,已在整车工厂做协同实训/搬运等公开演示与对接。优必选布局了人形机器人全栈式技术,并在此基础上开展智能服务机器人解决方案的研发、设计、智能生产和商业化应用,涵盖了多个行业的企业级和消费级广泛应用场景。优必选是全球极少数具备人形机器人全栈式技术能力的公司,包括行业领先的人形机器人硬件与控制技术(机器人运动规划和控制技术、高性能伺服驱动器)、人工智能技术(仿人大脑、仿人小脑)、机器人与人工智能融合技术(SLAM 及自主技术、视觉伺服操作与人机交互),以及机器人操作系统应用框架ROSA2.0。优必选是全球极少数能完成小扭矩到大扭矩(扭矩从0.2Nm到200Nm)伺服驱动器批量生产的公司之一,人形机器人Walker是中国首个商业化的大型人形机器人。
开普勒
开普勒在控制算法、感知系统、执行器设计与柔性操作等方面具备较完整的技术组合。
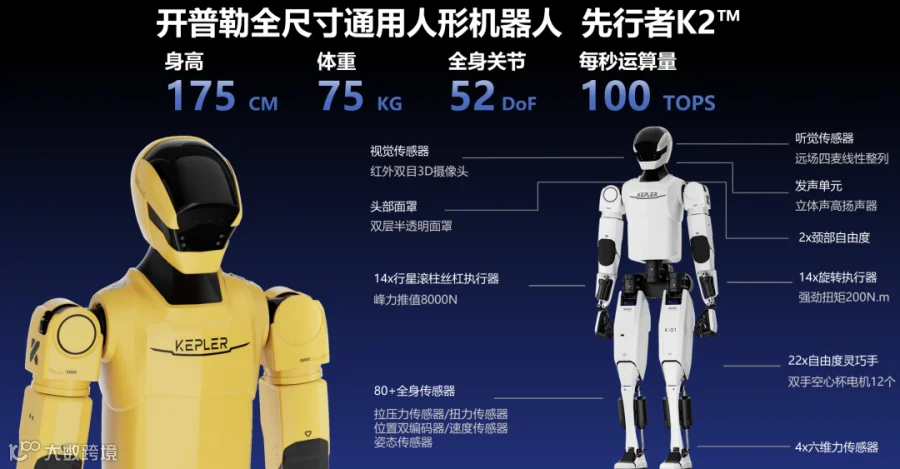
先行者K2的具身智能软件在动态智能感知、智能任务规划、全身协同操作、自主训练学习、自主智能移动等方面取得了全面进展。先行者K2的四肢主体结构均采用一体化设计,刚性更好,易于制造和维护。新一代绳驱触觉灵巧手单手多达11个自由度(主动+被动),单手负载能力可达15公斤,每个指尖配备高达96个触点的柔性传感器,全面提升灵巧操作能力。先行者K2采用全新星型线路布线方式,走线简洁,连接快捷。续航方面,其延续使用2.33KWh大容量电池在保证8小时不间断续航的同时,增加了兼顾直充和自动充电的特殊充电接口,长时间工作时的补充能源方式更灵活。K2增加了头部转动和俯仰2个自由度,人机交互更加自然,在全身52个自由度的加持下,先行者K2的感知范围和手眼协同能力更进一步。同时,K2也具有更加酷炫的工业机甲风外观造型,完美匹配蓝领机器人工作场景。
云深处DR01
具身智能通用型人形机器人,依托DR01人形机器人平台进行人工智能与大数据训练,将推动具身智能技术迭代与进步,探索人形机器人行业应用,提高人类工业生产力与家庭生活质量。
DR01 具备卓越的运动与平衡能力:在路面打滑或受到外力干扰时,能快速恢复平衡继续行走;速度超过 1.6 m/s,可跨越 18 cm 台阶、攀爬 25° 斜坡,并适应随机起伏地形。

DR01 融合机器人自身感知与环境感知,通过“感控一体”学习算法在复杂、离散地形中稳定通行,并能构建高精度三维地图,自主导航与避障。
此外,DR01 的自主学习能力 较强,可在环境和任务变化下生成新的行为技能,从而不断优化自身表现。
核心硬件结构包括云深处自研的 J60 轻量化关节 与 J100 高爆发力关节,提供动力与灵活性支持。

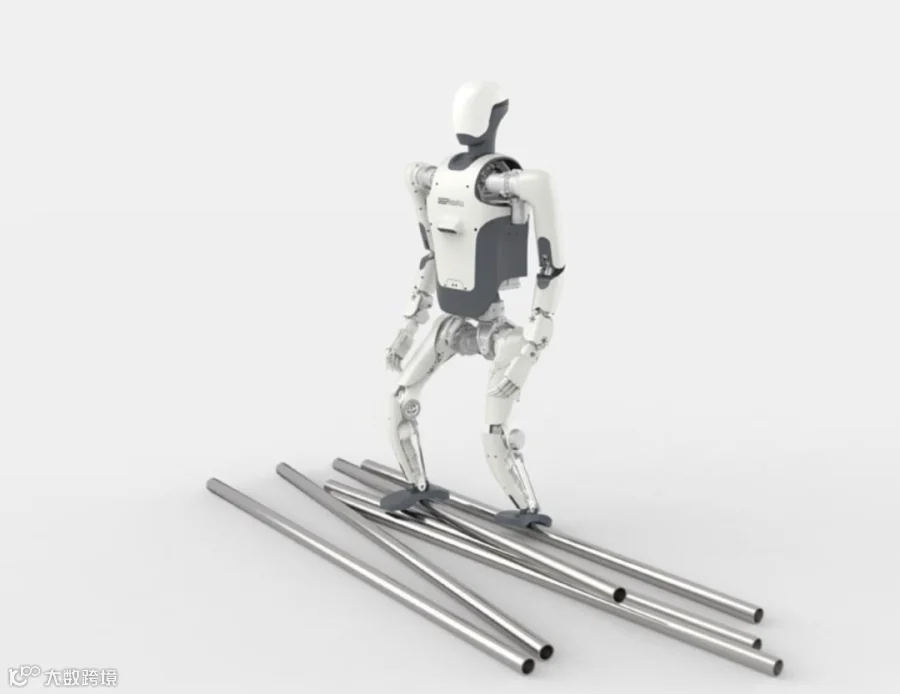
越疆Dobot Atom
3 月 18 日,越疆科技正式发布并预售全球首款「灵巧操作+直膝行走」具身智能人形机器人 Dobot Atom,售价 19.9 万元起,Dobot Atom 作为工业级操作类人形机器人,通过精细化上肢作业能力和高可靠性的下肢适应能力,旨在推进人形机器人行业商业化加速,以高性价比实现人形机器人走入千行百业。Dobot Atom 身高 1.53 米,体重 62 公斤,全身配置高达 41 个自由度的关节,采用 1:1 仿人手臂构型设计,搭载重复定位精度 ±0.05mm 的7自由度工业级仿生协作臂、类人联动头颈和五指灵巧手,实现对人体关节运动逻辑的完整复刻,适应常见 700-1000mm 工作台高度灵巧作业,并具有工业现场稳定通过能力。
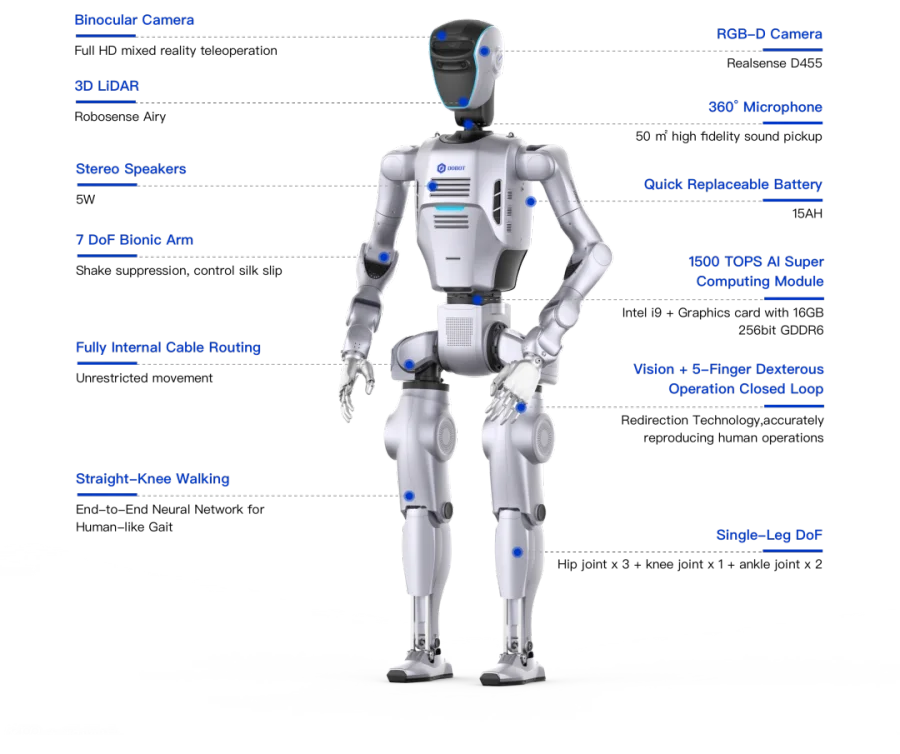
DOBOT Atom Max 是一款最先进的 41 自由度人形机器人,专为高端机器人研究和工业应用而设计,配备灵巧的 12 自由度双手、60FPS 全高清视觉系统,以及 Intel RealSense D455 深度感知。其可选的 Embodied AI 套件 提供高精度 URDF 模型、开源训练框架和多模态数据工具,加速研发进程。Atom Max 支持 VR/MR 远程操作,具备无标记跟踪和双控制模式(全身/分段),由一块 1500 TOPS 的 AI 模块驱动,实现实时边缘计算。凭借亚毫米级精度和 360° 环境感知,它大幅降低了 AI 机器人创新的门槛,同时支持从精密装配到动态运动研究等复杂任务。
智元
智元机器人主打“本体 + AI”全栈架构,将机器人硬件、感知、模型与数据一体化设计,拥有远征、精灵、灵犀三大机器人家族,产品覆盖交互服务、工业智造、商业物流及科研教育等多种商用场景。
智元机器人灵犀业务部总裁魏强曾表示:“智元机器人是少数能够在本体小脑和大脑全栈自研的人形机器人公司。智元机器人通过本体研发关节驱动器、力矩传感器,再通过MRT和AMLO的通信协议构成本体技术平台。同时,小脑部分还有自研感知算法以及Slam、规控算法。这些算法支撑了人形机器人在物理空间进行感知、交互和运动。”
在硬件 / 本体方面,智元的“远征”系列体现了诸多技术亮点:采用自研 PowerFlow 关节模组 和准直驱动策略,部分关节峰值扭矩可达270Mm,配备水冷 / 散热机制以维持持续输出。

“灵犀” 系列则强调轻量化与开源生态。

夸父(Kuavo)
乐聚机器人与海尔在2024年中国家电及消费电子博览会(简称:AWE)联合展出了国内首款在“人形机器人+智慧家庭”场景应用下的成果——夸父(Kuavo)。

重量约 45 kg,具备约 26 个自由度(整机)设计。最高步速可达约 4.6 km/h。支持跳跃动作,能进行连续跳跃(高度超过 20cm)等高动态运动。
面向家庭 / 服务场景,其展示了洗衣、浇花、插花、晾衣服等家务操作能力。此外也面向科研、教育、公共服务、工业等多种应用方向。
达闼
2023年8月,达闼推出双足人形机器人XR4,这款机器人采用了独创的并联结构设计,实现了业界领先的高扭矩密度输出,单腿力矩高达600N·M。通过强化学习生成步态及实时数字孪生技术的应用,XR4将加速商业化进程,并计划逐步投入教育科研、工厂制造、物流搬运等领域,最终服务于社区和家庭场景。
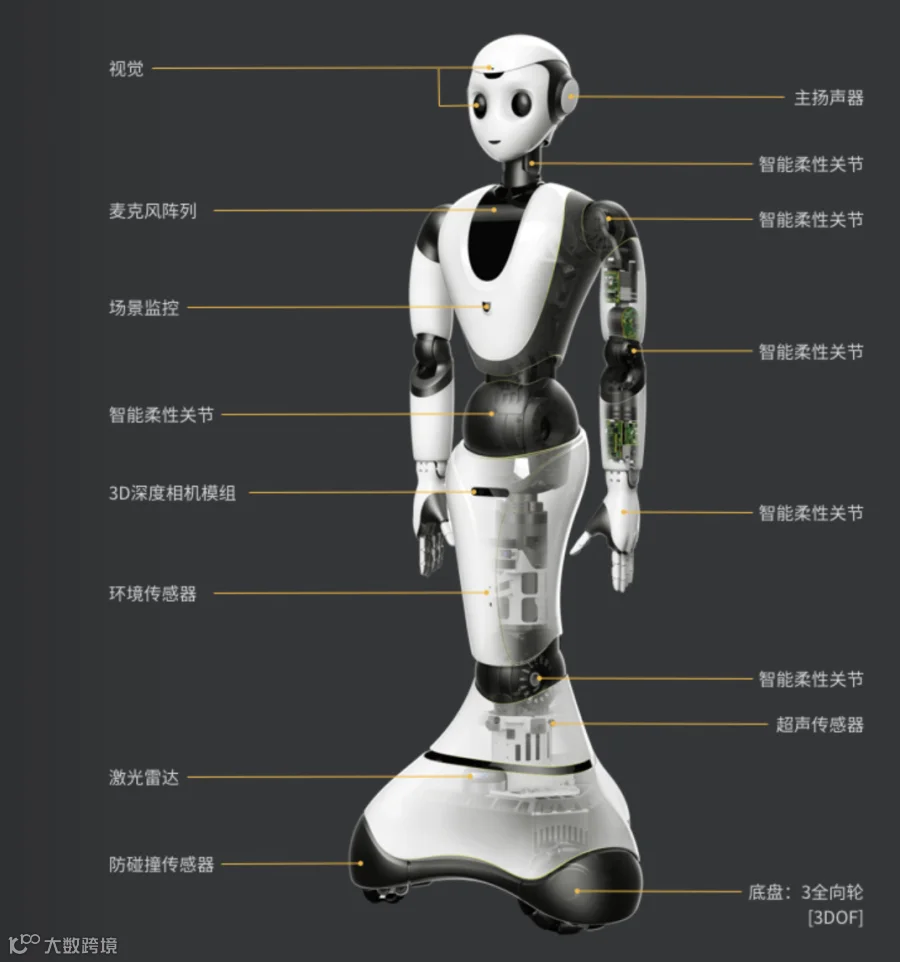
Cloud Ginger XR1
领先的智能柔性关节:34个智能柔性关节遍布颈、肩、肘、腕、手、腰、膝、底盘,能歌善舞、智能抓取、自主行走、自动避障、自动平衡。
多层立体感知:多个2D/3D相机、激光雷达、超声传感、IMU、力传感、麦阵等
Cloud Ginger系列柔美人形智能服务机器人到Cloud Pepper,再到人形双足机器人XR4“七仙女”

小鹏PX5
2023 年的 XPeng Tech Day 上首次亮相,高度约 1.5 米。据称具备双足行走能力、避障和操控能力。PX5 配备超轻量化的人形手臂(未公开提及具体材料)和灵巧双手,每只手具备 11 个自由度,可抓取重量达 1 公斤 的物体。其双手采用刚柔混合驱动方案,能够通过指尖触觉感知抓取并包覆不同形状的物体。机械臂具备 7 个自由度,定位精度达 0.05 毫米,最大负载能力 3 公斤。

相关材料企业
BASF
工程塑料、聚氨酯和热塑性聚氨酯
2025年8月18日 – 巴斯夫与上海傅利叶智能科技有限公司(傅利叶)签署了合作备忘录(MoU),旨在评估和开发各种机器人应用的新材料解决方案。作为战略合作协议的一部分,巴斯夫与傅利叶将共同探索工程塑料、聚氨酯和热塑性聚氨酯在机器人及其部件的应用和开发,并在技术、商业、市场和业务模式上建立合作。
旭化成
机械部件材料MG210・POM/CNF复合材料、TENAC™ MG210 聚缩醛树脂
聚缩醛 (POM) 优异的机械性能和摩擦/磨损性能使其成为齿轮和轴承等机械部件的常见选择。Asahi Kasei 建议在机械部件和其他机器人应用中使用TENAC™ MG210 聚甲醛树脂,这可以延长产品寿命并减小产品尺寸
POM/CNF复合材料

旭化成化成开发的 CNF 是含有棉绒成分的生物质纤维,通过先进的技术将其微缩至纳米级。POM/CNF复合材料非常适合用于制造尺寸较小、壁厚较薄、重量较轻的滑动部件。
减速机材料LEONA™聚酰胺树脂

减速齿轮是机械转换器,可减速并转换电机产生的旋转运动以产生所需的力。旭化成正在开发一种将聚酰胺的良好疲劳行为与出色的耐摩擦和耐磨性相结合的材料。
振动控制材料XYRON™改性聚苯醚树脂
XYRON™改性聚苯醚 (PPE) 树脂将改性 PPE 树脂的阻燃性、尺寸稳定性和耐热性与具有高损耗系数的减震材料相结合,为整个产品系列提供良好的阻尼性能。建议使用具有高损耗系数的减震改性 PPE 树脂,它可提供减震效果,有助于实现降噪设计。
Teijin
Tenax™ 碳纤维与热塑带材(PPS 基 TPUD);轻量高刚复合材料。
机器人手臂/高精度部件(Tenax)、轻量化叠层梁、壳体/托架(PPS-TPUD 胶带)
Mitsubishi Chemical Group(MCG/MCAM)
C/C复合材料、、C/SiC复合材料
C/C(Carbon Fiber Reinforced Carbon)复合材料是以碳为基体,用碳纤维加固而成的,具有高强度、高弹性、高韧性、超高耐热性,在1000℃以上也可以使用。 C/SiC也称为CMC(陶瓷基体复合材料),是以陶瓷为基体的复合材料,本公司的CMC由碳纤维强化而成。它比C/C复合材料强度更高、弹性更高,可以根据用途区分使用。
用于机器人手臂、机械手。
Solvay(Syensqo)
Ryton® PPS(高流/薄壁)用于电机定子线圈骨架/绝缘件;Xydar® LCP 用于高耐热连接器。
Celanese
Vectra®/Zenite® LCP(薄壁高流/尺寸稳定),Fortron® PPS(与 DIC 合资品牌,常用于电机绝缘)
用于伺服电机细间距连接器、FPC 端子座;定子骨架/绝缘件
Sumitomo Chemical
SUMIKASUPER™ LCP(超高流、薄壁强度、低翘曲),用于电机/伺服连接器、微电机结构件
Victrex
PEEK 高性能聚合物(耐磨、耐热、可金属替代)
轻量减速器齿轮/壳体、轴套/滑动件
SABIC
ULTEM™(PEI)/LNP™ 系列、润滑改性复合料
机器人外壳(高耐热/阻燃/尺寸稳定)、执行器/齿轮/伺服电机部件
Polyplastics
LAPEROS® LCP(连接器专用系列、超高流/低翘曲)
细间距连接器/FPC 端子座、微电机绝缘结构
Covestro
Makrolon® PC / Bayblend® PC+ABS / TPU
机器人外壳/面罩/传感器壳体、服务机器人整机外观件
LG化学
PA、PBT、PK等玻纤增强材料、TPEE、PC、PC/ABS

框架&外壳:
该部件对于材料的抗冲击性、刚性和尺寸稳定性要求较高,可使用PA+60%玻纤增强材料。此外,可采用生物基PA56+40%的玻纤增强材料响应绿色发展要求。
电机、减速器:
电机和减速器作为机器人的核心硬件,决定着其动作方式和动作强度。LG化学的LUPOX和LUXY材料具备优异的耐化学性、耐水解性和耐磨损性等,同时满足机械性能要求。
夹持器:
LG化学的TPC-ET(TPEE热塑性弹性体)材料拥有出色的触感、阻燃性、抗冲击性和耐磨损性,在保障夹持器具备灵敏触感和灵活抓取功能的基础上,实现了材料的轻量化和低能耗设计。
阻燃PC/ABS、透明PC、阻燃PBT以及聚酮类的玻纤增强改性材料,可广泛应用于人形机器人的外壳、头盔、电机马达和传感器等部件。不仅仅是“减重”,高性能材料替代方案更深入地从总体上提高了机器人的续航能力和延长使用寿命,降低运动能耗并提高安全性。

外骨骼 PA+玻璃纤维
会议推荐

扫描下方二维码即可登记报名
