在汽车工厂的自攻螺母上件工站,小米机器人曾交出一份亮眼的成绩单:持续作业3小时,双侧同时安装成功率90.2%,精准匹配产线76秒的节拍。然而,在工业场景中,90%的成功率意味着每10次就有一次需要人工干预,这离“稳定可靠”的规模化落地仍有距离。
今天上午,雷军在其微博上透露了小米机器人团队在灵巧手领域的最新进展。

这次升级不仅仅是简单的参数堆叠,而是一次围绕触觉感知、仿生构型、可靠性及散热的系统性工程突破。目标只有一个:让机器人的手,无限逼近人手的灵活性与可靠性,将作业成功率推升至接近100%。
▍ 触觉破局:让“盲操”成为可能
在复杂的工业现场,视觉遮挡是常态。当摄像头被工件遮挡,如何确保抓取依然精准?答案是触觉。
团队在研发中发现,想要实现更精细的“掌内操作”,就必须赋予机器人全掌触觉感知能力,不仅是指尖和指腹,更要包括掌心。然而,市面上成熟的全掌触觉仿生手方案较少,且触觉数据的获取极度依赖低效的遥操作,难以构建大规模数据集。

为此,团队选择了触觉手套作为破局点。这一方案具备三重优势:
全掌覆盖:能够同时采集指尖、指腹、掌心的完整触觉数据;
高效采数:人可直接穿戴手套完成操作,快速构建海量数据集,为模仿学习提供燃料;
易于维护:将易磨损的触觉层与手部本体分离,大幅降低维护成本。
从演示视频中可以看到,当人手与仿生手分别穿戴触觉手套执行同一操作时,两者输出的触觉数据波形高度近似。这意味着,人类精细的触觉经验,正在被高效“迁移”给机器人。
▍仿生构型1:1复刻
有了高质量的触觉数据,下一步是如何让机器人“学得会、做得到”。这要求仿生手在物理构型上尽可能与人手1:1对齐,否则仿真与真机之间的“同构问题”会导致策略迁移失效。

基于此前已在工厂验证的90%成功率版本,团队对仿生手进行了大幅度的设计重构:
体积压缩60%:从228mm × 105mm × 64mm缩减至187mm × 88mm × 36mm,完全匹配成年男性手部尺寸;
自由度提升50%:总自由度大幅增加,其中主动自由度提升83%,更接近人手22-27自由度的灵活水平。
这意味着,在可达空间、驱动能力、惯量分布和操控响应上,新款仿生手与人手的差异被压缩到了极小范围。机器人不再需要“翻译”人类动作,而是具备了与人类高度同构的物理执行能力。
▍15万次抓握,只为“少停机”
在有限尺寸内塞入更多自由度,必然面临硬件可靠性的严酷考验。
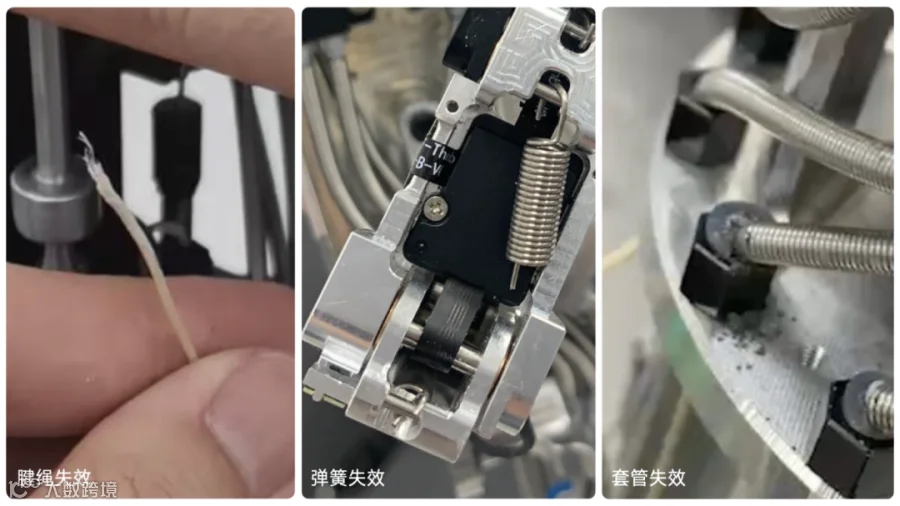
团队坦言在实际应用中,即便是一些简单操作,仿生手也常在不到1万次重复作业中便出现腱绳断裂、弹簧失效、套管磨损等问题。
为了解决这一痛点,团队在过去一年中采用了 “设计-仿真-测试”的闭环迭代 策略:
针对真实作业场景中的受力模式,逐一优化内部零件——从腱绳材料到关节结构,从传动套管到驱动电机;通过高精度仿真预判失效风险,在样机阶段便完成多轮改进。
最终成果是,在抓握这类重复操作中,新款仿生手已实现15万次以上的循环寿命,且在整个测试周期中保持了稳定的触觉数据输出。61小时的完整测试视频已同步开源,这不仅是参数的提升,更是对工业场景“不停机”需求的坚实回应。
▍散热探索
高自由度意味着更多电机。当所有电机被压缩在一个狭小空间内,热失控成为隐形杀手。在重载工况下,单手电机塔功率可超100瓦,即便按70%的综合效率计算,仍有超过30瓦的功率转化为热量。尤其是在堵转等高热损状态下,散热能力直接决定了连续作业时长。
团队在常规被动散热之外,大胆引入了仿生学思路——模拟人类汗腺的蒸发散热机制。原理上,室温下1毫升水蒸发即可带走2000焦耳以上的热量。

具体实现上,团队在紧凑的小臂结构中采用金属3D打印制作液冷循环通道,通过微型泵将电机热量转移至蒸发区,利用蒸发吸热实现快速降温。实测数据显示,这套“仿生汗腺”系统每分钟可蒸发0.5毫升水,提供约10瓦的主动散热能力。
这10瓦看似不大,但在高负载、长周期的工业场景中,它可能正是保障连续作业不降频、不宕机的关键增量。
▍ 从“抓得住”到“抓得像”
技术指标的最终检验,来自真实作业中的表现。团队希望仿生手不仅“能完成任务”,更要在动作过程中表现出类人的柔顺性、包覆性,具备与人手相近的可达空间、执行速度和负载能力。
为此,他们利用采集到的人手抓握数据,在仿真环境中融合触觉信息,应用模仿学习与强化学习策略,对大量数字零件进行训练。经过反复迭代,仿生手已能生成接近拟人的抓握姿态——不再是机械的夹取,而是像人一样自然地包裹、调整、适应。
从演示视频中可以看到,在抓握过程中,全掌触觉传感器能够实时反馈接触力分布,帮助机器人动态调整姿态,实现更稳定的操作。
▍结语
从3小时持续作业到15万次循环寿命,从90.2%成功率到逼近100%的目标,小米CyberOne仿生手的这次升级,实质上是推进其人形机器人从“专用工具”向“通用能力”迈进的关键一步。
更值得关注的是,小米团队选择将15万次循环测试的原始视频、TacRefineNet触觉感知模型,以及Xiaomi-Robotics-0项目进行开源。在具身智能的赛道上,数据与算法的开放,正在加速整个行业的进化。
当机器人手不仅能做事,还能“感知”,当它既具备人手的灵巧,又拥有远超人类的耐久与散热能力,工业自动化的下一个拐点,或许正在到来。
注:此文章仅供参考,如涉及作品版权问题,请与我们联系,我们将在第一时间协商版权问题或删除内容!