搜索
首页
大数快讯
大数活动
服务超市
文章专题
出海平台
流量密码
出海蓝图
产业赛道
物流仓储
跨境支付
选品策略
实操手册
报告
跨企查
百科
导航
知识体系
工具箱
产业园
更多
找货源
跨境招聘
DeepSeek
首页
>
高扭矩与紧凑性,人形关节驱动热管理技术解析
>
高扭矩与紧凑性,人形关节驱动热管理技术解析
材荟智造
2025-12-16
2
导读:结构高度集成也带来了新的工程挑战,模块内部发热严重、电磁干扰和绝缘防护要求提高等。
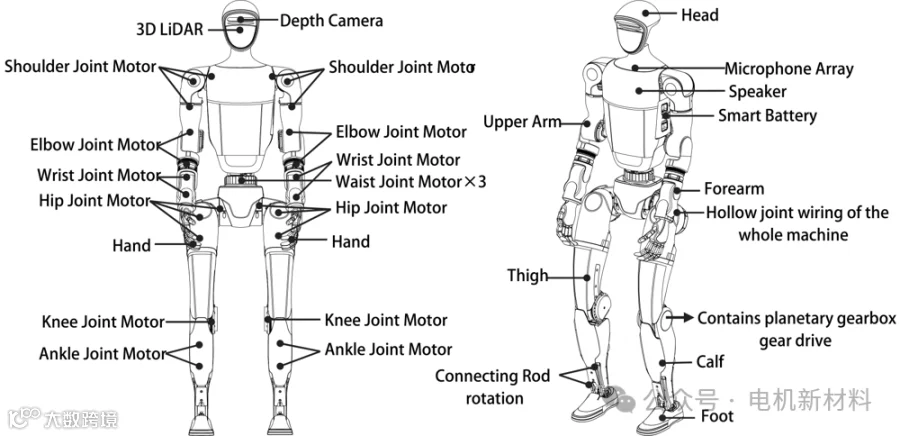
人形机器人典型关节布局示意图
肩、肘、腕、髋、膝、踝等关节位置及驱动单元的分布
人形机器人的关节遍布全身,四肢合计拥有数十个自由度,需要多种类型的执行机构来实现复杂动作。
典型人形机器人的主要关节及自由度:
肩关节:
每个肩部通常有3个旋转自由度,类似人体肩膀的球形关节,允许手臂前后摆动、侧向张开以及绕臂轴旋转。这需要三个电机协同控制,以实现复杂的上肢运动。
肘关节:
每个肘部通常为1个自由度,功能类似人体肘关节的铰链运动。它主要承担前臂的屈伸运动,提供臂部举起或下放的力量。
腕关节:
每个手腕一般具备2个自由度,用于手掌的俯仰和偏转等运动。这使机器人手部能够灵活调整姿态,以完成精细操作和不同方向的抓取。
髋关节:
每条腿的髋部通常具有3个自由度,与人体髋关节类似,包括腿部前后抬举、侧向开合和绕腿轴旋转。髋关节需要支撑上半身重量并配合实现行走、转身等复杂下肢动作。
膝关节:
每条腿的膝部为1个自由度,即小腿相对大腿的弯曲/伸直运动。膝关节主要负责缓冲步行时的冲击和实现跨步动作,在支撑体重时需要提供较大力矩。
踝关节:
每个踝部通常有2个自由度,包括脚掌上下的翘曲和左右的倾斜。踝关节对维持平衡至关重要,可适应不平地面并通过细微调整实现站立稳定。
各关节共同构成人形机器人的运动骨架。全身关节自由度总数因设计而异,一般在
20~40
个之间,特斯拉Optimus初代合计28个自由度,二代增加到30个。
这些自由度赋予机器人接近人类的灵活性,但也对运动控制提出了高要求。控制系统需要协调多个关节同步动作,确保姿态平衡与轨迹精确。
尤其下肢关节必须实时调整力矩以维持动态平衡,上肢关节则要求末端定位精准和平稳握持物体。
许多机器人
还在关节处加入力矩传感器用于感知交互力,从而实现柔顺控制和碰撞检测。
某些关节
配备抱闸用于掉电时锁定
,
以在断电或紧急情况下稳固地保持姿态。
人形机器人的关节执行机构按
传动形式
大致可分为
三类
:
旋转关节、直线关节和柔性关节
。
不同类型在结构特点和核心部件组合上各有特点。
旋转关节:
采用电机直接驱动关节旋转轴,一般配有高减速比齿轮传动以增大输出扭矩。
这是当前最常见的方案,每个旋转关节通常集成
无框永磁电机+高精度减速器+位置编码器
等核心组件。
典型配置是无框力矩电机结合零背隙减速器
,
谐波减速器或RV减速器或行星齿轮组来实现高扭矩输出,加装绝对式编码器以检测关节位置。
由于齿轮传动存在弹性形变和背隙,许多设计还在关节
输出端增加二级编码器
,以补偿齿轮间隙带来的定位误差。旋转关节结构紧凑、响应
速度
快,已广泛应用于
腰部、肩部、髋部等关节
。
Unitree G1机器人在肩、髋等主要关节使用了行星减速器和谐波减速器相结合的旋转关节方案。
成熟的
工业机器人技术沉淀
使得这类旋转关节模块的
供应链和成本较为成熟
。不过,
纯刚性传动的负载能力受限于齿轮强度和电机尺寸
,主流水平的
人形机器人手臂目前举重能力仅约5–10公斤
,
难以比肩工业用途所需的数十公斤负载。
直线关节:
通过电机带动丝杠/螺杆等机构,将电机的旋转运动转换为直线推拉运动,从而驱动关节转动。
这类设计常用于需要
承受大载荷和长行程的关节
,某些机器人的
膝关节、踝关节采用电机+滚珠丝杠/滚柱丝杠的直线致动方案
。
直线驱动具有
自锁特性
,
减速比高,能在紧凑空间内提供强大的推力
。特别是行星滚柱丝杠由于多个滚柱同时接触受力,承载能力和耐久性突出,适合
髋、膝、踝
等
冲击载荷大
的关节。
特斯拉Optimus、Apptronik Apollo
等新一代人形机器
人就在腿部大量引入线性执行器
,实现了高负载能力的下肢关节设计。直线关节的缺点是结构稍复杂、控制上需考虑螺旋传动的间隙和效率,但它提供了提升力矩密度和抗冲击能力的新途径,正成为人形机器人下肢驱动的一个重要方向。
图/
Apollo robotic
柔性关节:
在关节传动中引入弹性元件或柔顺结构,使关节在受力时可以略微弹性变形。
典型实现是
串联弹性执行器
(SEA)
,即
在电机和负载之间串联弹簧或弹性体,并配合力传感器
。
这种柔性驱动能吸收冲击
能量
、提高与环境接触的安全性,还可通过弹性元件存储和释放能量,类似生物肌腱的作用,如部分机器人采用
钢丝腱绳
驱动模拟肌肉拉力
。
柔性关节对于需要安全人机交互的场景,类似
服务
机器人
的场景非常有用。
但是引入弹性会带来
机械谐振
和
控制难度
。
弹簧的存在形成二阶振荡系统,可能导致关节响应滞后或振动。目前,一些高端人形机器人,
NASA Valkyrie、Boston Dynamics Atlas
等在部分关节采用SEA来增强抗冲击性,再通过复杂控制保证动态性能。
但在实际应用上,
机器人关节设计中常常混合使用以上
多种执行器
类型
,以平衡性能和结构需求。
为了追求极致的紧凑和轻量,目前业界正流行
一体化关节模块设计
,将电
机、减速器、驱动器高度集成为一个模块化组件
。这种一体化关节电机被视为未来趋势,能够大幅减少零部件数量、简化机器人组装,并提高关节的
功率
密度和响应速度。
结构高度集成也带来了新的工程挑战,
模块内部发热严重、电磁干扰和绝缘防护要求提高等。
由于关节驱动单元
体积
小、功率密度高且封装紧凑,
散热难题已成为人形机器人产业亟待攻克的瓶颈之一。
当电机在狭小空间内持续运转时,所产生的热量不易散发,会导致关节
温度
不断累积上升。
电机故障的根本原因往往是
温度失控
,过热会使电机定子绕组的绝缘层老化失效,永磁体温度超过居里点则发生不可逆退磁,高温还会加速轴承润滑剂变质和齿轮磨损。
对于期待
长期自主工作的机器人
而言,关节驱动的散热问题成为必须解决的关键。
当前的人形机器人原型机已经显现出散热不足的迹象。
典型案例是特斯拉Optimus早期测试中,关节电机在搬运稍重物体时温度飙升至警戒线,被迫自动降速甚至停止工作以防损坏。
据报道,
Optimus配备的
2.3 kWh电池
在这种保护策略下也仅能支撑
不到2小时
连续运作
,其中相当一部分原因正是高温限制了电机发挥。
根源在于
高热密度产生与低散热能力的不平衡
。
热源多且集中:
关节驱动内部不只有电机发热,往往还集成了驱动电路等电子模块。一个关节的主要热源包括:
定子绕组的铜损耗、铁芯反复磁化的铁损耗、轴承摩擦和电机转动产生的机械损耗、转子永磁体的涡流损耗,以及逆变器功率MOSFET的导通/开关损耗等驱动电子热耗
。
这些热源集中在
几立方厘米
的体积内,持续工作时总发热功率相当可观,却没有相应规模的散热通道来疏导。
散热通路受限:
为追求紧凑和防护,关节执行器往往采用
全封闭的金属壳体
。这虽然提高了结构强度和防水防尘性能,但也使
空气对流受限
,内
部热量只能通过固体导热和表面辐射缓慢散出
。关节外壳面积有限,缺少散热鳍片等扩展表面积的设计,导致散热能力先天不足。
工况动态多变:
人形机器人的关节负载千变万化。
行走时关节需反复启停、高频率加减速,搬运物体时又需要长
时间
输出高扭矩。
工况的
不确定性
使得
热设计难以针对单一稳定场景进行优化
。频繁的加减速会产生周期热冲击,高峰时电机瞬时电流可数倍于额定值,导致短时间内大量热堆积。
机器人
起跳、奔跑
等剧烈动作时,单腿关节瞬时功率可能飙升至
3~4千瓦
。如此高的短时热流密度,远超稳态散热能力,累积形成温升。再加上部分关节可能紧邻高温电子元件或电池舱,环境温度偏高,也加剧了散热负担。
“热得快,冷得慢”
是人形机器人关节面临的尴尬处境。面对人形机器人关节散热的挑战,从
材料、结构、主动冷却和智能控制
等多个层面探索解决方案。
高导热材料与结构优化:
提高关节部件的导热系数,尽可能畅通热传导路径,是被动散热设计的基础思路。
关节电机的外壳通常采用铝合金等高热导材料制造,以便迅速将定子线圈和减速器产生的热量传递到外部环境。某些先进设计还在金属外壳中
嵌入高导热系数的
复合材料或石墨片
,增加导热效率
。
通过
拓扑优化
来改进结构。
利用
仿真优化关节内部的肋片和散热通道布局
,缩短热传导路径并增大散热表面积。
有研究在关节腔体内加入
蜂窝状或翅片状结构
,既保证强度又提高对流散热效果。
引入
相变材料
作为被动热缓冲正在兴起。石蜡合金在吸收一定热量后会熔化,实现熔化潜热储热,限制温度峰值。
在极端环境下使用
PCM可将电子部件温度控制在60℃以下,避免超过关机阈值。
对于机器人关节,
PCM可以在短时高负载时吸热熔化,等负载降低后再将热量慢慢释放出来凝固
,反复循环,有助于削平温度波动峰值。
主动冷却设计(风冷/液冷):
风冷
方式常见于传统电机,利用风扇吹动空气对流带走热量。在人形机器人关节中,也有方案尝试为
每个关节集成微型风扇或鼓风机
,实现
分布式风冷
。
但是,
给28个关节各加一个小风扇就意味着新增28个小电机
,不仅
系统复杂度和噪音增加,也占据宝贵空间
。
目前
风冷更多用于机身躯干
等有空间布置风扇的位置,而四肢关节很少单独安装风扇。
液冷
方式是
在关节电机定子或减速器附近布置冷却水套
,通以循环冷却液,将热量带出关节再集中散到环境中。
液冷的优势在于换热系数远高于空气,对流传热能力强。据统计,强制液体冷却系统的总传热系数显著优于自然对流空气冷却。液冷用于人形机器人关节电机时,能够在短时间内将电机核心温度降低。
但液冷
需要增加水泵、管路和散热器
等部件,
系统更复杂且维护要求高
。一些厂商正尝试开发
小型轻量的微通道液冷冷板
来嵌入关节,同时使用介电冷却液确保漏液也不会损坏电路。
银轮股份等也正在将车用冷却技术引入机器人关节散热,除却成本问题,液冷适合于高负载长时间运行的人形机器人。
电机改良:
采用
大直径短
长度
的电机形状、选用
高磁能积的永磁材料
,
钕铁硼
或
钐钴
来提高力矩、
优化定子绕组线径和匝数
以降低电阻。
绕组工艺与材料的升级
对
降低铜损
效果显著。
近年来在新能源汽车驱动电机中兴起的
Hairpin绕组
技术正被应用到机器人关节电机上。
扁线相比传统圆线填充系数更高,绕组槽满率提升可达20%以上,意味着更粗更紧密的铜导体带来更低电阻和更大散热面积。
国内厂家大洋电机等已经将扁线电机技术用于优必选Walker等人形机器人的关节驱动,并辅以高耐热等级的绝缘材料和先进硅钢片,大幅减小了绕组发热。
降低铁芯损耗,通过采用
超薄高硅含量的硅钢片
、开槽切口设计减少涡流环路等措施,可以有效降低铁损带来的发热。
热电耦合监测与智能温控:
借助传感与控制技术,可以对关节内部温度进行实时监测并主动调控驱动状态,防止温度超限。
随着材料科技的进步,诸如
石墨烯增强的导热界面材料、高导热陶瓷/SiC填料
等新材料将进一步提升散热器件性能。
结构设计上也会朝着
轻量化与高集成
度突破
,未来将出现
针对机器人的微型热管阵列、相变液冷一体模块等新颖方
案。可以预见,未来人形机器人关节将逐步摆脱“高热困境”,在更轻巧的尺寸下实现长时间稳定运行,为人形机器人大规模产业化奠定坚实基础,支撑起机器人持久工作。
会议推荐
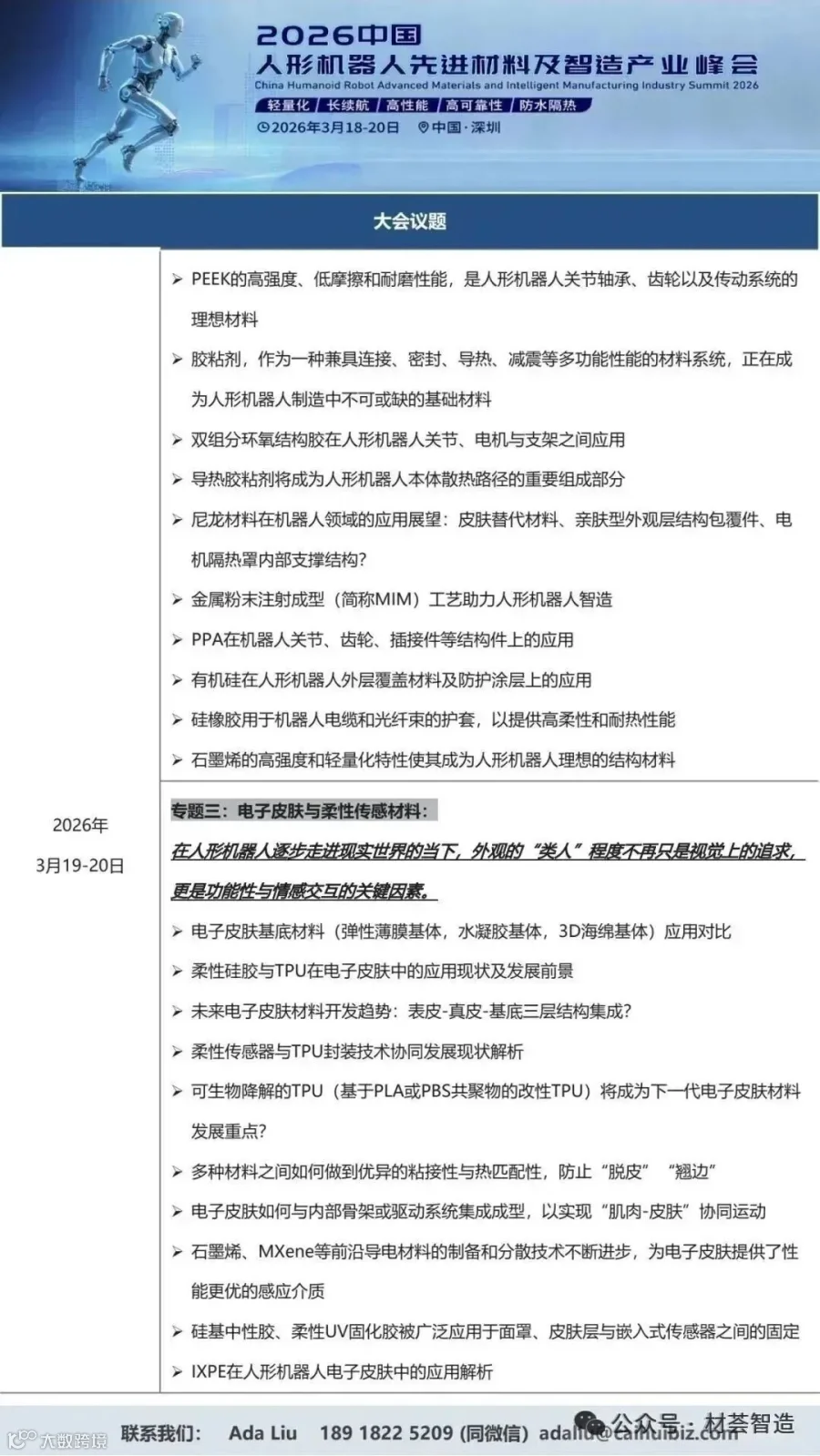
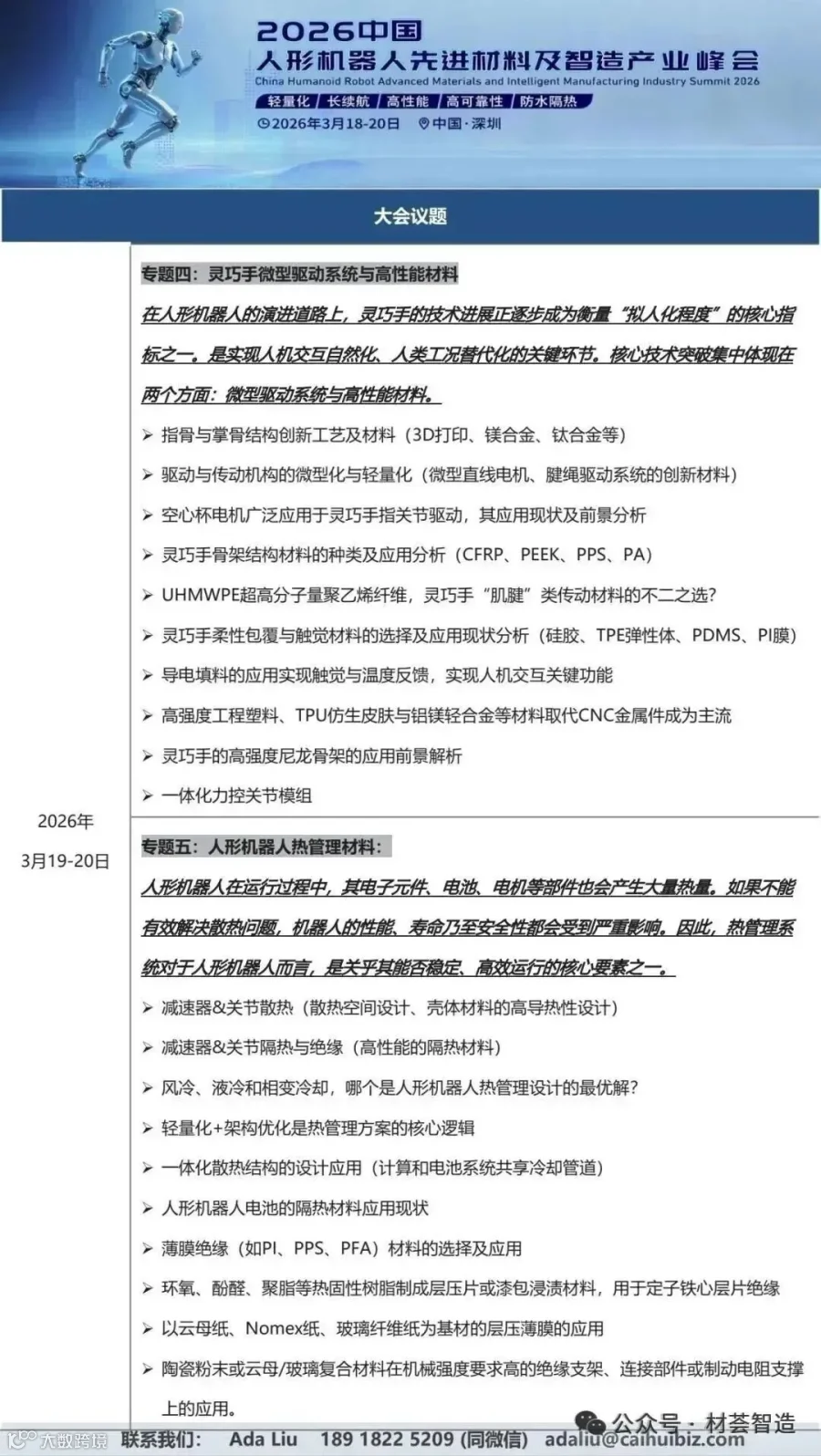
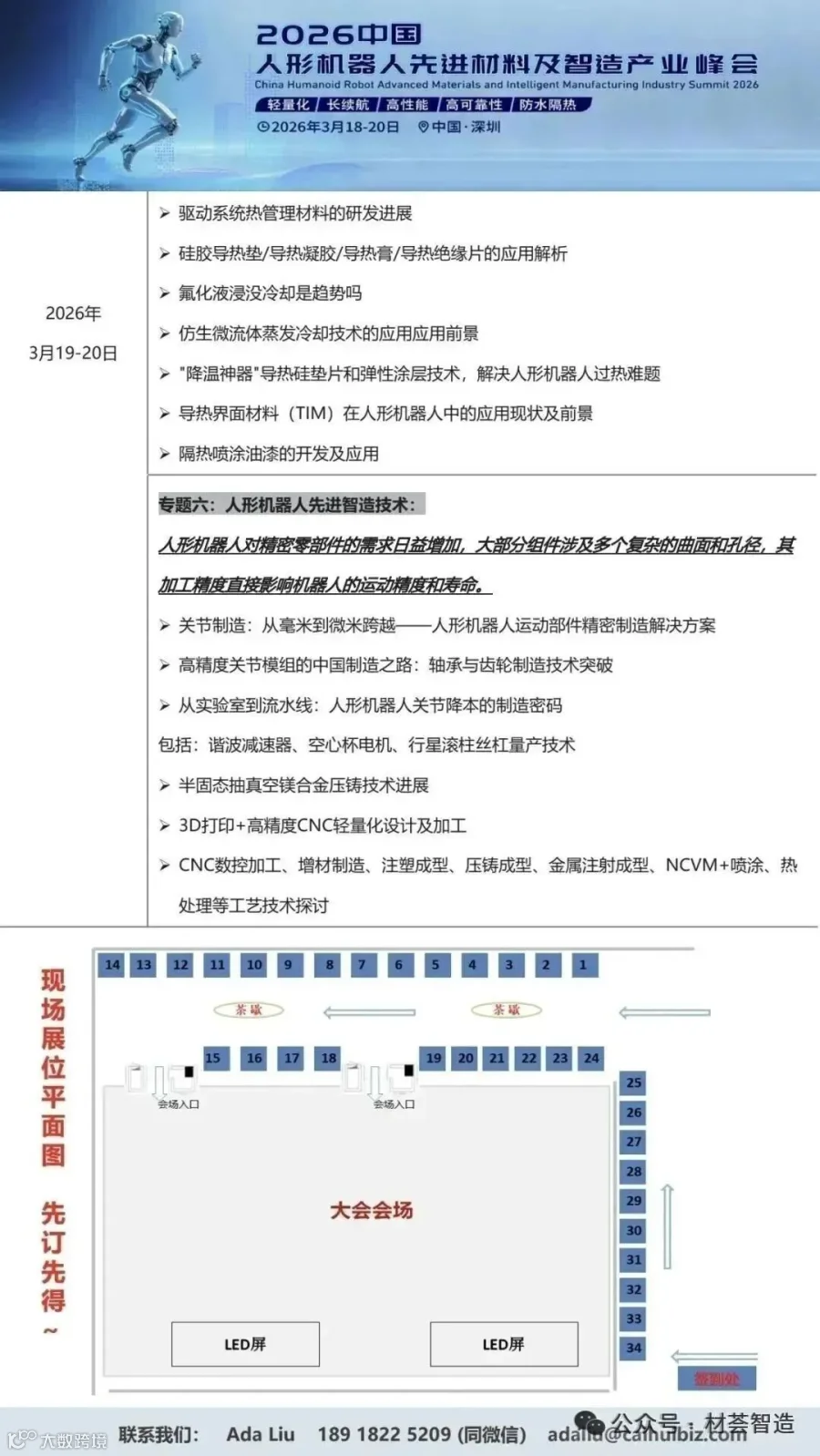
2026中国人形机器人先进材料及智造产业峰会
📅 2026年3月18-20日
📍
中国·
深圳
报名及咨询
扫描下方二维码即可登记报名
参会咨询:
刘女士 189-1822-5209(同微信)
Email:adaliu@caihuibiz.com
赞助咨询:
周女士 134-0214-1129(同微信
)
Email:renezhou@caihuibiz.com
【声明】内容源于网络
0
0
材荟智造
材料创新,荟聚智造
内容
0
粉丝
0
关注
在线咨询
材荟智造
材料创新,荟聚智造
总阅读
0
粉丝
0
内容
0


 材荟智造
材荟智造