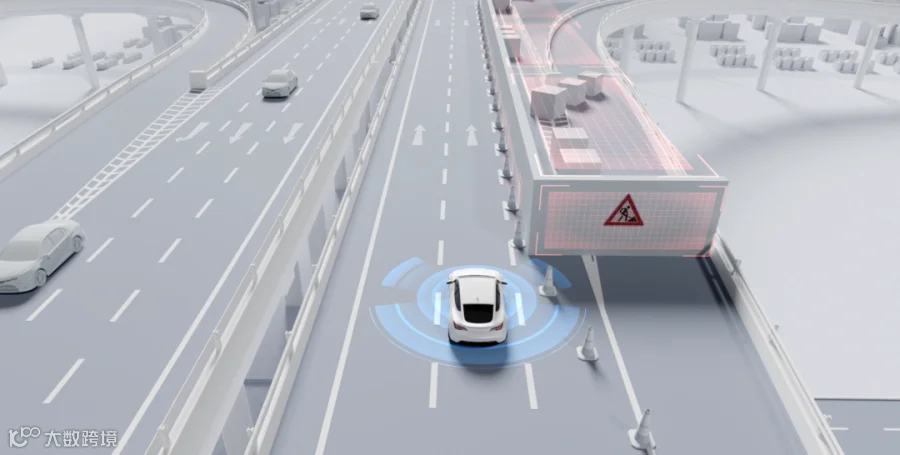



过往的高精地图是按月度、季度更新,云化后地图的要素可以做到分钟级更新;结合车端实时感知数据、驾驶行为经验信息和车企自有数据资产等,进行云端多程建图,提升数据的鲜活性;
各个主机厂对高精地图的依赖不同,所需要的要素也不同,云化的地图可以以图层的形式灵活组装,甚至可以按照要素选择;
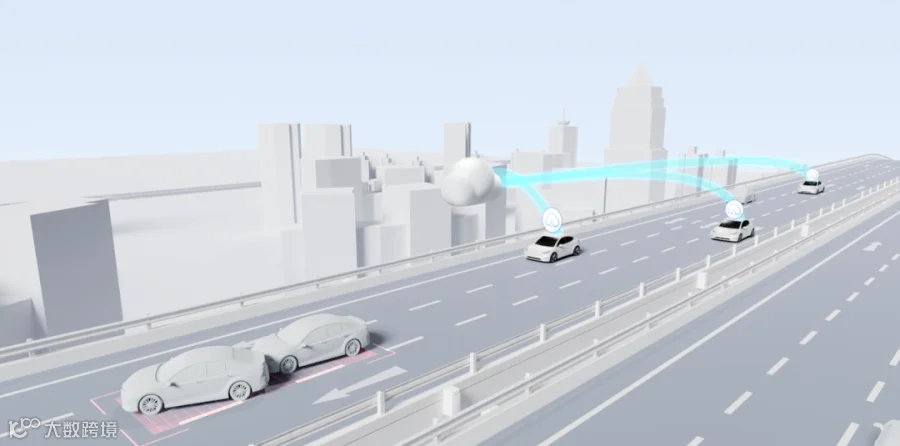
地图数据与驾驶经验数据云化开放之后,主机厂的车队能够将数据回传,一同更新自动驾驶所需要的数据。
基于大模型挖掘的驾驶经验图层,可以提供传统地图不具备的弯道建议车速、颠簸路段建议车速、行人易穿行道路信息等更丰富的驾驶经验数据,使得自动驾驶系统的驾驶行为更加接近真人,更加老道。