
讲述 | 沈劭劼
编辑 | HiEV


智驾的极致解法
在智能驾驶行业,大疆车载一直是低调、另类的选手,不拼传感器、不堆料,瞄准的更多是低成本和高效。
成本到底可以多低?
本届中国电动汽车百人会论坛上,大疆车载负责人沈劭劼给出一个比例:一套L2+智能驾驶系统的成本下限和上限分别是整车的3%和5%。按照十几万元和30万元车型计算,合理成本区间是5000到15000元。
沈劭劼介绍了大疆车载包括极致压榨软硬件的降成本思路。
主要包括:
多场景硬件复用;
极限压榨硬件潜力,以及任何一点闲置的算力;
弱依赖、少假设,尽量减少对传感器的依赖;
与产业伙伴深度合作。
在大会上,沈劭劼还发布了一套低算力的智能驾驶解决方案。
基于32TOPS算力,采用大疆自研惯导双目+7V/9V的纯视觉配置,通过强视觉在线实时感知、无高精地图、无激光雷达,实现城区记忆行车;基于80TOPS,可以实现城区领航驾驶。
以下是沈劭劼演讲的内容,HiEV作了不改变原意的编辑:
在大疆,我们一直遵循几点理念进行产品设计。
简洁。在系统设计过程中,我们本能地拒绝传感器的堆叠,拒绝「面多加水、水多加面」这种不解决根本问题,同时不断增加系统复杂度的方法。
高效。我们强调对现有软硬件资源的极限压榨,从而让系统性能在给定条件下达到最高。
可拓展。其实无论是天上飞的、地上跑的,都需要面对不同的消费者和不同的产品定义,这些方方面面的不同,倒逼我们修炼产品内功,确保整个平台是可拓展、可交付的。
最后,前面这些东西全部结合起来,可以理解为叫做优美。
比较浅的理解,可以是智能驾驶系统对汽车工业设计的影响,我们的系统使用过程中,能给用户舒服的人机交互。
更深层一点的理解,也是我们对科技之美的理解。一个系统,无论是工程师还是用户,我们看到之后就应该有一种感觉,认为这个东西就应该是这么解决的,不多不少。

L2+智驾系统成本:
上限5%,下限3%
智能驾驶系统的下限,其实就是用户真的要愿意去用它,无论产品用做得怎么样,有多便宜,如果大家不愿意去使用,无法建立信任感,那技术是没用的。
上限,说穿了就是可接受成本。
我们尝试去思考L2+智能驾驶系统的总成本对整车售价的占比。
L2 +指的是,比较高阶的功能,像领航高速、记忆泊车,也包括相对比较基础的行车辅助、泊车辅助功能,以及主动安全相关的功能。
L2+系统的总成本,包括软件硬件成本,比如传感器、芯片、软件、地图(如有)等。换而言之,其实就是主机厂合作伙伴为了实现这套功能,采购系统最后需要付出的总成本。
以我们非常粗浅的观察:下限和上限, 分别是3%和5%。
先说说上限为什么是5%,而不是更高?
其实我们目前比较深刻地认识到,科技水平并不足以达到 L3 或者更高阶的水平。L2 +智能驾驶系统带来的,是一定程度缓解人的驾驶疲劳。那对于消费者来说,为了「缓解疲劳」到底愿意付出多少?
这其实就是上限。
下限为什么是3%,而不是更低?
回归到使用意愿的维度,太便宜了,会对整个系统的软硬件架构过分限制,功能就很难使用。所以,我们会遵循3%和5%这么一个比例进行整体的设计。
中国乘用车市场的售价分布,其实非常简单,基本上价格集中在30万以下的区间。最后得到两个数字,一个是下限,一个是上限。
算下来,L2+智能驾驶系统的成本区间大概是5000到15000元。
下限其实还比较好看。
因为我们可以把行泊一体的系统搭配,包括各种高分辨率的视觉传感器装上去,也能够保证软件层面有足够高的利润。
如果预算比较足,也可以把激光雷达、雷达等传感器计算上去,基本上我们会遵循这些原则进行整个系统的设计。

大疆车载的技术策略:
复用、极限压榨和弱依赖
在一系列的约束条件下,怎么做?
首先,多场景硬件复用。
我们本能地拒绝任何一个传感器在某种场景下不被使用的情况。换句话说,例如泊车使用的环视传感器,我们想办法让它在其它所有的场景下,都能够被用得起来,节省成本。
极限压榨硬件潜力。
哪怕一丁点算力,行泊一体的过程中,各种空闲的算力,我们想办法把它用上。
弱依赖、少假设。
这更多是工程理念。我们会思考,如果卫星定位失效怎么办?地图鲜度不能保证怎么办?甚至更多一点,路上遇到无法识别的这些物体,怎么办?如果路不平怎么办?
这些假设,让我们思考一个基于视觉的立体视觉解决方案。
在保证低成本的同时,尽可能地去减少整个系统对环境的依赖。因为每一个依赖,其实隐含的是系统的鲁棒性降低。
最后,产业深度合作,更多向内求解。
我们去适配不同的软件、芯片平台,适配不同传感器配置,跟我们的合作伙伴一起,去思考如何让系统更经济地落地。

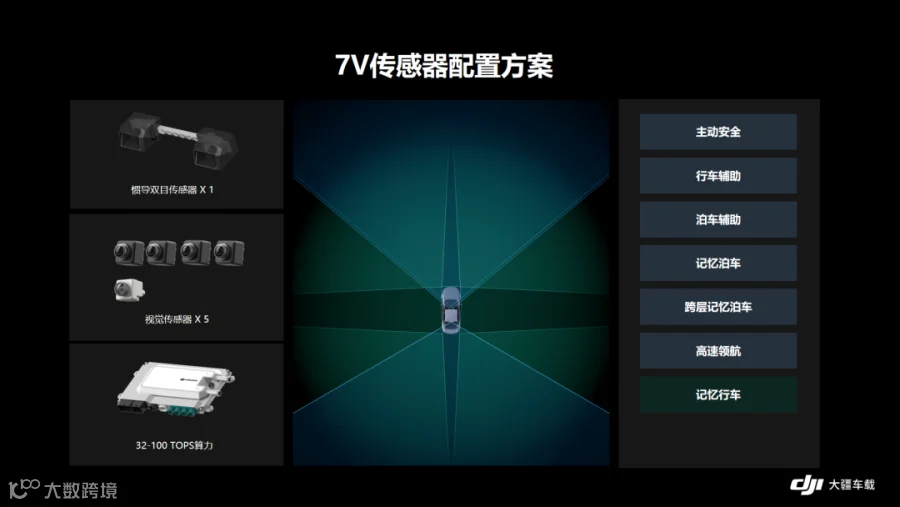
「双目+7V」,
实现城区记忆行车功能

再往下一代,就是基于惯导双目系统,以及一套7V传感器配置方案。
除了目前大家所认知的高阶智能驾驶的功能之外,我们引入了(含城区)记忆行车的功能。
对于更高阶的城区功能,在外加两个相机之后,就可以进行还不错的支持。
记忆行车功能,说穿了就是我们在思考,如果对于大多数汽车使用者来说,平时(高频)使用场景就是上下班,那能不能做到在上下班的过程中,将用户开过一次或者多次的路径记下来
接下来,利用一个非常有限的传感器和算力组合复现这个路径。
当然这个复现的过程是比较聪明的,从而起到一个完全单机的功能,来达到在相对复杂的环境里面比较可用的状态。
基于7V 视觉方案达到记忆行车的功能,会在今年的下一款量产车上进行发布。

其实双目看起来挺丑的,有时候觉得这么大的一个遮光罩一点都不美。接下来,能不能把遮光罩去掉?答案是可以的,即使有玻璃反光,通过技术方案也能够做得到。
第二步,双目中间的那根棍子其实也非常的麻烦,能不能把它剪掉?这也是我们目前技术上其实能够达得到的。希望能够给行业带来可使用的低成本传感器方案。
最后来看3%和5%。
实话实说,作为供应商我对这个数字一点都不高兴,这么低。
到底什么样的原因?其实回过来看智能驾驶,大家到底想用些什么东西?
在 L2+的阶段,智能驾驶就是缓解驾驶疲劳的工具。
到了L3、 L4 阶段,智能驾驶实现的是一个购买时间的过程,智能驾驶并不能让车开得更快,但是它能够释放人在车上的时间。
时间和疲劳是完全不同的两个价格概念,有了时间之后才能够释放时间,以及带来后续各种各样的增值相关的活动。
对于大疆车载来说,我们非常坚定地在解放时间,希望能够给行业带来一点点贡献。

汽车大变革开启,
HiEV期待与你一起去探险!
我们是谁?
Hi,你好鸭。
我们是一群乐观、积极、爱搞事的汽车行业观察者,成员包括自动驾驶领域的资深媒体人,长于创意和表演指导的视频导演,主张用代码客观评测汽车的帅气程序员等小伙伴。汽车行业的大变革已经开启,现在我们诚邀你一起加入探险之旅!
我们期待什么样的你?
资深分析师(2~3名)
岗位职责:
挖掘线索,撰写汽车领域的独家报道,包括资本、人事、新车等领域;
独立策划选题,输出行业和公司等相关深度报道;
参加新车试驾,输出可读性强的试驾体验报告;
追踪热点,积极响应,输出快讯内容。
岗位要求:
有志于长期从事汽车行业,对行业的变化有高敏感性,了解用户的兴趣点;
对新车、新技术充满好奇心;
具备高质量信息的搜集、筛选、核实能力;
擅长独立思考,逻辑严谨,文笔精准,能输出汽车领域的深刻观点;
懂车,擅长驾驶;
对短视频感兴趣,能撰写视频脚本或出镜更佳。
实习分析师(2名)
岗位职责:
配合编辑一同完成选题稿件;
微信公众号文章排版、社群运营;
汽车视频脚本撰写支持,以及短视频平台效果跟踪。
岗位要求:
希望建立某一领域的体系化知识能力;
热爱写作,对长报道撰写有热情;
对微信公众号排版、社群运营有一定了解,手速快;
熟悉微信视频号、B站、抖音等媒体的内容调性;
每周有四天固定工作时间,响应迅速;
脑洞大,性格好,学习能力强,能与团队共同成长;
具备一定耐压能力。
我们能提供什么?
对于从事汽车领域报道过程中的线索、人脉、方向支持;
参与最前沿的新车试驾、技术探讨等活动;
与你能力相匹配,高于行业平均水平的薪资待遇;
对于特别优秀者,提供公司期权。
投递方式
邮箱:zhangxiangwei@xevlab.com
(请附个人作品链接或相关文章)

